#uart2
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
After the announcement of the deal with Yahoo!, there were 170K signatures of unhappy Tumblr users petitioning to prevent the sale in 2013.
Text
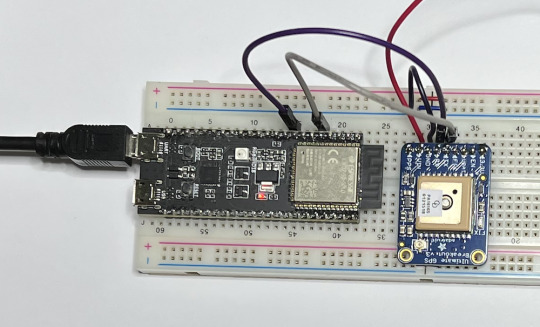
ESP32 Serial Ports - UART0, UART1, UART2 Access Using the Arduino IDE
The ESP32 has three UART interfaces: UART0, UART1, and UART2. They provide asynchronous, bidirectional communication at up to five Mbps. You can establish serial protocols using the appropriate breakout boards, such as RS232, RS422, RS485, USB, and more.
1 note
·
View note
Text
STM32 Nucleo board - printf in Keil IDE
STM32 보드를 사용하다 보니,
Keil 환경에서 printf 를 위해서 아래 내용을 반드시 추가해야 한다.
(TrueStudio 환경은 또 다른 유사 코드를 넣어야 하고 ㅠㅠ)
CubeMX 로 자동으로 코드를 만들면 이 정도는 추가되었으면 하는데, ㅎ 내 바램이고...
TRY의 MCU 세상: [STM32F4xx] Nucleo 보드 테스트 #12(printf 함수 사용:KEIL))
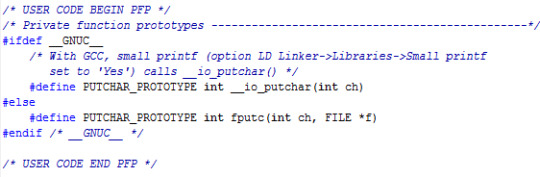
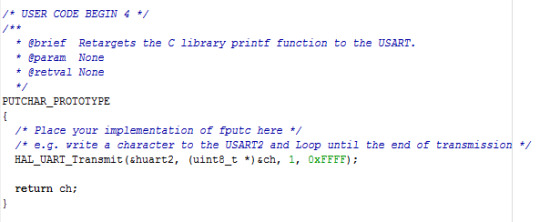
다음과 같은 코드를 main.c 파일에 추가하면 됩니다.
#ifdef __GNUC__ #define PUTCHAR_PROTOTYPE int __io_putchar(int ch) #else #define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f) #endif PUTCHAR_PROTOTYPE { HAL_UART_Transmit(&huart2, (uint8_t *)&ch, 1, 1); return ch; }
(Update!!) 더 자세하게 잘 설명된 곳을 찾았다.
printf를 사용하여 USART로 문자열 출력
0 notes
Text
F3 brushed cleanflight firmware upgrade

Just click the Shop Now button above for more information regarding this HappyModel Turtlebee F3 1S Betaflight Brushed Flight Controller OSD Current Sensor 2.4G Receiver For RC Brushed Tinywhoop Drone item. We also have many attractive products that you might like to see from our similar collections of flight controller 2kk, logitech flight controls, beecore f3 flight control, pix 4 flight controls, sensor switch dc 5, f114 flight controller, piko f3 flight controler, supers f3 flight controler, s137 sensor, 20x20 f3 flight control, inav f7 flight controller, flight controller iflight mini, and many more.ĭon't forget the limited time Parts & Accessories discounts only on Cicig. If you have an interest in other items related to HappyModel Turtlebee F3 1S Betaflight Brushed Flight Controller OSD Current Sensor 2.4G Receiver For RC Brushed Tinywhoop Drone, you can discover it all on our website as we have the best Parts & Accessories products from which you can search, compare and get online. Support ACRO/Stable/Horizon/Air multi fly modeīuilt-in 2.4g receiver( Frsky/Flysky/DSM2 DSMX to choose)īuilt-in voltage and current detector alarmĭshot150 protocol ready, support Betaflight flip over when crashed Receiver mode: Frsky D8/ Flysky AFHDS-2A/ DSM2 DSMX to choose Item Name: Turtlebee F3 Flight controller This new flight controller also integrated 2.4G receiver with 3 versions to choose(Frsky/Flysky/DSMX). The biggest improvement is "Flip over after crash", now you can flip over your drones after crash just like the Brushless whoop. As soon as the battery is connected, all motors hit 7.2V DC. They dont work with any versions of Cleanflight. Turtlebee F3 brushed flight controller is a new upgraded version of Beecore v2.0 flight controller. I have two micro SP Racing F3 Evo brushed flight controllers sold on. PPM receiver welded to the UART2 GND, + 5V, RX2 .Then set Receiver mode to RX_PPM in Cleanflight configurator.Turtlebee F3 brushed flight controller built-in Frsky RX/OSD/Current meter support Flip over SBUS receiver welded to the UART2 GND, + 5V, RX2 . Then Enable Seria_RX and Set Receiver mode RX_SERIAL ,Select Sbus signal in Cleanflight configurator.ģ. DSM receiver soldered directly to the DSM interface 3.3V, GND, RX3, Enable Seria_RX for UART3 and Set Receiver mode RX_SERIAL, Select Spektrum1024(DSM/DSM2) or Spektrum2048(DSMX) in Cleanflight configurator.Ģ. This Tiny F3 EVO_Brush flight controller is only use for BRUSH MOTOR, Not compatible for BRUSHLESS MOTOR.ġ. Support for PPM, SBUS, DSM/DSM2/DSMX receiver input signal.ħ.In support of the world almost all hollow cup motor, including 1020 coreless motor. Open Cleanflight > connect to the board > click Load FirmwareLocal > select the firmware file > click the Flash Firmware button. Stackable The SPRacingF3EVO is a stackable design. After all the said configuration, when I connect f3 Evo using app, f3 entering into DFU mode. Small and lightweight The SPRacingF3EVO has a standard 36x36mm form-factor with 30.5mm mounting holes on a thick PCB for durability. Uploaded V2.2 firmware to f3 evo brushed. With a large current NMOS transistors, operating current of up to 10A or more. Each Brushed motor is equipped with freewheeling diodes.Ħ. The SPRacingF3EVO runs Cleanflight which can be configured to suit your needs using a cross-platform GUI (Windows/OSX/Linux). Features Designed for Whoop frames using 6mm-8.5mm brushed motors, On board FrSky compatible receiver (+- 100m Range), ARM STM32F3 processor, Option to mount USB on top or bottom of board, MPU 6500 Gyro/Accelerometer vis SPI, 5A FET’s to drive brushed motors up to 8.5mm, Dip switch for both Bind and Boot loader mode, 1. Using STM32F303CCT6 + MPU6500, advanced hardware platform F3 guarantee more stable flight.ĥ. Independent design of the circuit structure, comes with the Voltage control technology, 1S lipo battery input, the UART1/2/3 output 5V, DSM port output 3.3V.Ĥ. F3_EVO_Brush is in the revision on the basis of the F3 EVO SP RACING,it is a 32bits brush flight controller based on SP RACING F3 EVO firmware.ģ. Item Name: Tiny SP RACING F3_EVO_BRUSH flight controllerġ. Sous CleanFlight, tant que je ne suis pas aliment tout va bien, par contre, des que j'alimente, l'IHM se freeze BetaFlight - Experiemental, but cutting edge firmware, new revision/features almost weekly (Supports F1, F3 and F4 FC) RaceFlight - Specialized more for racing and removing all the unnecessary stabilization and GPS out to increase.
0 notes
Text
STM8S005C6T6 Ethernet development board
In this project, we built an STM8S005C6T6 based Ethernet development board for our IoT experiments. This development board consists of ENC28J60, 10BASE-T stand-alone Ethernet controller, CH340G, USB serial interface, 2 LED indicators, and passive buzzer unit.
The firmware framework for this development board has been developed using SDCC. To enable IPv4 support, we convert the EtherCard driver, which is available for the Arduino platform. The current version of this driver supports all other EtherCard functions except TCP support.

In the given design, the SPI terminals of the MCU are connected to the ENC28J60 Ethernet controller. All SPI terminals, such as MISO / PC7, MOSI / PC6, and SCK / PC5, are connected directly to the Ethernet controller. In addition, the PC4 terminal of the MCU is used as ENC28J60, CHIP-SELECT.
The CH340G USB serial interface is connected to the UART2 terminals of the MCU. In STM8S005C6T6, the UART2 is mapped to the PD6 and PD5 terminals of the MCU. The USB interface of this development board consists of the jack-sense feature. The jack-sense status can access from PD7.
The minor peripherals such as LED indicators and buzzer are connected to the PORTD of the MCU. The LED indicators are connected to terminals PD0 and PD1 and can be activated or deactivated via jumpers. The passive buzzer is connected to PD4 and can run through the STM8 beep sound generator unit.
All peripherals of this development board are powered by a 3.3V supply. The recommended supply voltage for this development board is 5V to 9V.

In addition to the STM8S005C6T6, this development board supports the following STM8 series, LQFP48 packaged microcontrollers: STM8S007C8T6, STM8S207C8T6, and STM8S105C6T6.
All the resources of this development board are available at the GitHub project repository. The supplied firmware is developed and tested with SDCC version 3.8 on a Linux environment. Before compiling and flashing the MCU, make sure to install the stm8flash application on the system. The supplied makefile use this application to program the fuses and flash memory of the MCU.
The schematic and PCB design of this project is released under the terms of CERN-OHL-W Version 2.0. The firmware framework is released under the terms of the GNU GPL 2.0 license.
#STM8S005C6T6#STM8S007C8T6#STM8S207C8T6#STM8S105C6T6#ENC28J60#CH340G#SDCC#stm8flash#Ethernet#USBLC6-2SC6#MMBT3904#HR911105A#IPv4#2N7002#AMS1117-3.3#SPI#Development Board
0 notes
Link
Specifications ArduPilot AP_Periph F303 CAN node GPS SAM-M8Q (GPS, GLONASS, Galileo) Magnetic Compass QMC5883L Barometer DPS310 UART1, Firmware update UART2, onboard GPS UART3, MSP Protocol ...
0 notes
Link
For just $44.00 Matek F405-STD BetaFlight STM32F405 Flight Controller + Matek FCHUB-6S Hub Power Distribution Board Specification:Matek F405-STD (user manual):Brand: Matek SystemsItem name: Flight Control BoardSize: 36x36mmMounting hole: 30.5mmWeight: 7gMCU: 168MHz STM32F405RGT6IMU: 32K ICM20602 gyro/accelerometer (SPI)Baro: BMP280 (I2C)OSD: BetaFlight OSD w/ AT7456E chipBlackbox: MicroSD card slot (SD/SDHC)VCP, UART1, UART2, UART3, UART4, UART5Built in inverter for SBUS input (UART2-RX)PPM/UART Shared: UART2-RXSoftSerial on TX2, S5 or S6 optionalCamera control on S6 or DAC optionalSmartaudio & Tramp VTX protocol supportedBattery Voltage Sensor: 1:10Current Sensor: No (FCHUB-6S, FCHUB-VTX, FCHUB-W option)BEC 5V: No (FCHUB-6S, FCHUB-VTX, FCHUB-W option)LDO 3.3V: Max.300mAI2C1 SDA & SCL: YesWS2812 Led Strip : YesBeeper : YesRSSI: YesMatek FCHUB-6S (user manual):Brand Name: MatekModel: FCHUB-6SItem Name: Power Distribution Board Built-in Current SensorSize: 36x36mm 30.5x30.5mm Hole Mounting , M3Weight: 8.5gBEC Output: 5V & 10V5V BEC Output:- Designed for RC Receivers, Flight Controllers, OSD and Servos.- DC/DC synchrous buck regulator- Voltage: 5.0V (4.9-5.1)DC - Current: 1.5A (Max. 2.0A 10S/minute)- Short-circuit tolerant ( 2 Seconds/minuate)10V BEC Output:-Designed for VTX or FPV Camera- Voltage: 10.0V (9.8-10.2) DC - Current: 1.5A ( Max. 2.0A 10S/minute)- Short-circuit tolerant ( 2 Seconds/minuate)- 10V can be used to power cameras labeled as 12V.- The 3S Lipo input voltage should be 11V plus.Current Sensor Module - Max. Range: 184A- 3.3V ADC- Scale the output voltage to milliamps ( 1/10th mW/A): 179Package included:1x flight control board2x 0.5mm*16Pin 5cm Flexible Flat Cable4x M3 Anti-vibration Standoffs1x FCHUB-6S PDB Board1x bag of screws
0 notes
Text
Matek F405-OSD - Betaflight FC
Matek F405-OSD – Betaflight FC
The Matek F405-OSD is a betaflight compatible flight controller with a built in OSD. Designed to connect directly to the FCHUB-6S. Specifications MCU: 168MHz STM32F405 IMU: 32K ICM20602 accelerometer/gyro (SPI) Support 32K Gyro update & 16K PID Loop OSD: BetaFlight OSD w/ AT7456E chip Blackbox: MicroSD card slot (SD/SDHC) VCP, UART1, UART2, UART3, UART4, UART5 Built in inverter for SBUS input…
View On WordPress
0 notes
Text
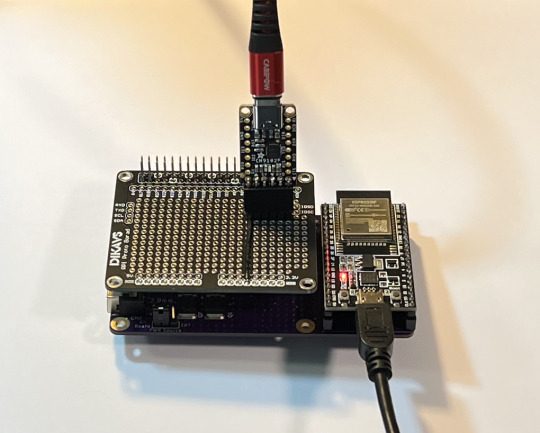
espBerry Project: ESP32 with CH9102F USB-UART Chip for Serial Speed up to 3Mbit/s
The ESP32 has three UART interfaces, i.e., UART0, UART1, and UART2, which provide asynchronous communication, communicating at a speed of up to 5 Mbps. This post describes the serial port programming per UART0, using the Adafruit WCH CH9102F Friend - USB to Serial Converter, which supports up to 3 Mbps.
1 note
·
View note
Link
Specifications ArduPilot AP_Periph F303 CAN node GPS SAM-M8Q (GPS, GLONASS, Galileo) Magnetic Compass QMC5883L Barometer DPS310 UART1, Firmware update UART2, onboard GPS UART3, MSP Protocol ...
0 notes