
Last Seen Blogs

ladiesz
Untitled

roastains-blog
Bez tytułu

jeansybaby
Maki is love, Maki is life

noodelzmop
Puppy Replika

gunsandkids
Untitled
Text
Séance 19
Nous avons continué sur le programme labview qui ne fonctionnait pas. Après de longues recherches, nous avons constaté qu’il fallait télécharger une bibliothèque.
Ensuite nous avons réussi à obtenir les valeurs mesurées à partir du capteur de courant et l’afficher sur le PC. Ensuite pour que l’interface soit compréhensible nous avons ajouté une jauge dans le programme qui doit changer de couleur selon une certaine valeur que l’on a fixé dans le programme. Nous réglons la couleur en rouge lorsque la valeur reçue est inférieur que 2 puis vert le reste du temps :



Programme entier LABVIEW :

Ensuite nous avons ajouté sur le programme arduino une partie pour l’écran LCD. Nous allons également changer la couleur ( rouge et vert ) et afficher la valeur reçue : initialisation du LCD

Puis écriture du programme qui permet ce changement de couleur :

En faisant les test nous obtenons :


et lorsque la tension est inférieur à cette valeur :


Puis nous avons testé le programme avec labview, nous recevons bien les données mais il faut un certain temps pour afficher les valeurs réelles, de plus, la couleur de la jauge ne suit pas ainsi que la valeur indiquée sur la jauge.
Hypothèse : il se peut que le problème vient des conversion faite, ou des délais qui ne sont pas les mêmes.
0 notes
Text
Séance 18
Tout d’abord nous avons essayé d'assembler tous les programmes marchants individuellement dans un seul programme.
Résultats :
De temps en temps on obtient des bugs or le reste du temps cela marche. De plus nous remarquons que le programme occupe déjà 90% de l'espace de stockage total ce qui pose un réel problème car ce n’est qu’une partie du programme finale.
Par conséquent on a enlevé une librairie, cela n'a rien changé , allégé le programme toujours aucunes différences, de plus nous constatons une forte instabilité au niveau du programme. Donc on a remplacé la carte UNO par la Méga.

Ensuite nous avons modifié toutes les pattes utilisées et le câblage entre les cartes afin de s'adapter à la Méga.
Résultats : le programme fonctionne assez bien. Tout d'abord l'espace à considérablement diminuer et il n'y a plus de bugs.
Au final, notre programme marchait parfaitement car les pattes qu’utilise la carte de transmission sont différentes de la carte Arduino Mega. De plus nous avons gardé notre carte SD initiale :
2ème partie : Labview
Le cahier des charges nous demande d’afficher les données sur un écran LCD mais aussi sur un PC. En ce qui concerne l’affichage sur le PC, nous allons le réaliser à l’aide du logiciel labview.
Nous avons tout d’abord, débuté par l’écriture du programme en utilisant la fonction VISA RESSOURCE NAME :

Elle permet de sélectionner le port dans lequel nous récupérons les données. Ensuite on lit ce qu’on reçoit à partir de :

Ensuite nous passons à la conversion entre les données reçues et celles que l’on affiche sur l’interface :

Cependant lorsque nous démarrons le programme, nous n’arrivons pas à sélectionner de COM.
Prochaine séance : résoudre le problème et réaliser une interface compréhensible pour l’utilisateur.
0 notes
Text
Séance 17
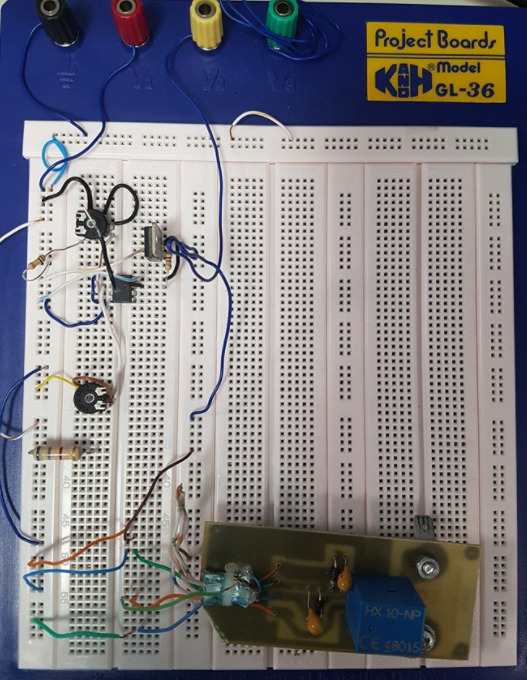
Nous avons débuté en faisant des tests avec le capteur de courant pour cela nous l’avons alimenté à l’aide d’un labdec :
puis nous avons créé un programme permettant de lire une donnée :
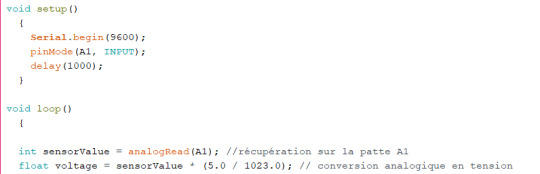
puis la valeur analogique est convertie en tension pour pouvoir étudier les mesures.
Puis nous avons vu que les valeurs étaient stables à l’exception de certaines valeurs, par conséquent nous affichons une moyenne de 10 valeurs avec le code suivant :
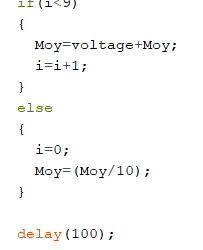
Puis nous obtenons des valeurs plus stables, ensuite nous désirons afficher le courant utilisé par les capteurs du projet chalet. Pour cela nous devons calculer une résistance pour obtenir un courant à partir d’une tension (loi d’ohm). En effectuant quelques tests en ajoutant et enlevant des capteurs pour que le courant varie.
De cela nous avons calculé une résistance de 0.380 en moyenne. Par conséquent on calcule le courant et on l’affiche sur le port série :

Puis au final nous obtenons les bonnes valeurs.
Dans un second temps nous nous intéressons à la nouvelle carte SD : carte shield DFR0074 .
Nous avons tout d’abord étudié la carte en recherchant des informations:
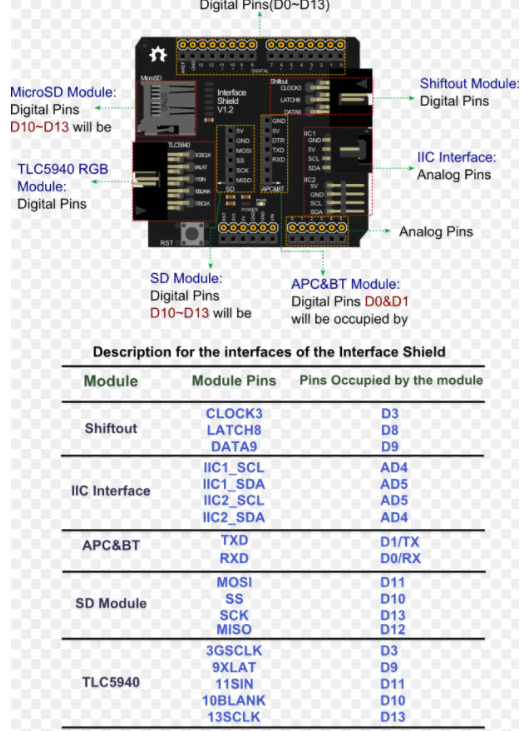
Et les pattes qu’elle utilise pour voir si elle utilise également les mêmes broches que la carte de transmission :
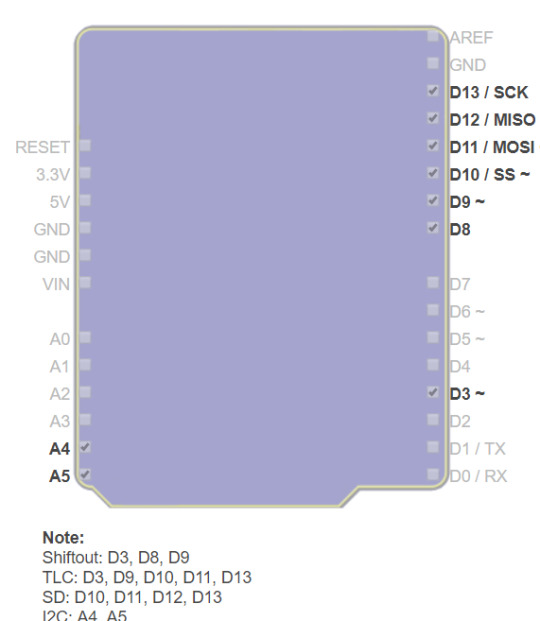
Après tests avec le programme on s’est rendu compte que la patte 10 était utilisé par les deux cartes, donc nous avons essayer d’alterner l’utilisation de chaque patte au niveau du programme cependant alors de nombreux essais nous n’avons obtenu que des échecs.
Prochaine séance : création de l’interface labview, recherches de solutions pour la carte sd + transmission.
0 notes
Text
Séance 16 : 2 heures le 14/02/18
Tout d'abord nous avons effectué un test du programme arduino pour la récupération de la tension. Après plusieurs tests nous avons remarqué que les valeurs en sortie étaient très variables et très instables. Nous en avons déduit que cette instabilité provenait des soudures du capteur lui-même et des COS. Par conséquent, nous avons choisi de remplacer le HY5P par un autre capteur de courant fonctionnant sur le même principe, le HX10-NP.
Photo :

HX10-NP capteur de courant 4 fils :
On a une résistance interne de sortie inférieur à 50 Ohm.

Le capteur sera alimenté de la manière suivante :

Dans un second temps, nous avons réalisé le programme arduino permettant l'affichage de la vitesse du kart sur l'écran LCD et l'enregistrement des valeurs sur la carte SD.
Prochaine séance : Test capteur, analyse de la sortie du capteur adaptation du programme. Prise en main d'une nouvelle carte arduino SD+SPI.
0 notes
Text
Séance 15
Séance 15 :
Durant cette séance nous avons modifié à de nombreuses reprises le programme de la carte SD et carte de transmission. Nous avons essayé de changer le numéro de patte pour vérifier que ce ne sont pas les pattes utilisées pour qui engendrent ce disfonctionement au niveau du programme.
De plus nous avons ajouté un bouton ( switch ) qui permet d'arrêter l'enregistrement ou le démarrer.
Or le programme ne fonctionne toujours pas, lorsque le boutton marche une autre partie du programme plante et vice versa. Ensuite nous avons testé encore sur l'oscilloscope les signaux des pattes 4 et 10 . Nous avons obtenu une bonne transmission or le fichier de données nous affichait seulement une suite de yyyyyyyyyy.
Ayant passé trop de temps sur le programme, nous avons décidé de passer à l'étude du capteur de courant HY5P.
Prochaine séance : test avec le capteur de courant, programme et recherche solution pour la carte SD et la carte de transmission.
0 notes
Text
Séance 14
Comme nous avons vu dans la séance 13, la carte de transmission utilise les ¾ des pattes utilisées pour la carte SD. Donc nous allons aujourd'hui essayer d'alterner l'utilisation des pattes pour chacune des cartes.
Pour cela nous modifions le programme de la carte SD + Transmission. Lorsqu'on regarde le programme dans le port série pour voir ce qui se passe, le problème est que l'initialisation de la SD se fait mais celle de la transmission non. Les deux cartes n'arrivent pas à s'initialiser en même temps.
Ensuite, en essayant de modifier une nouvelle fois le programme d'une autre manière, celui ci ne marche toujours pas. Lorsque l'on exécute seulement le programme de la carte SD ( le reste en commentaire) celui-ci marche parfaitement, or lorsqu'on ajoute le programme associé à la carte de transmission plus rien ne fonctionne. Pour pallier le problème nous avons décider tout d'abord de regarder ce qui se passe sur les pattes 4 et 10 à l'aide de l'oscilloscope.
Nous obtenons deux cas différents, soit nous avons le message qui est transmis (environ 170us) mais l'enregistrement ne se fait pas, de plus le signal de la patte 10 est à l'état bas, soit nous avons le contraire. Nous avons essayé de tester ligne par ligne le programme pour observer à quel moment le programme cesser de fonctionner.
À partir de ce moment nous avons vu que le programme ne s'exécutait pas dans un ordre chronologique c'est à dire qu'il sautait des étapes, par conséquent nous avions une erreur sur l'initialisation de la carte SD.
Prochaine séance : modifier le programme, de trouver à quel moment le programme ne fonctionne plus et essayer de trouver une solution + Test capteur de courant
0 notes
Text
Séance 13
Durant cette séance, dans un premier temps, nous avons terminé le routage du schéma eagle, c'est à dire adapter la taille des fils, prendre le bon diamètre. Mais aussi d'optimiser la plage et améliorer ce routage.
Partie 2 :

Dans un second temps nous nous sommes rendu compte que la carte SD utilisait les pattes 4, 11,12,13. Le problème est que la carte de transmission 433MHz utilise également 3 des pattes utilisées par la carte de SD. Donc nous allons tester un programme qui va, en fonction de l'état que l'on met sur la pate 4, de controller le moment où les pattes sont utilisées, un coup pour la carte SD, et l'autre pour la carte de transmission.

Nous avons décidé cela car nous avons vu, sur un site, qu'on pouvait connecter plusieurs périphériques en même temps.
Test : modification du programme et envoie de la température ( emetteur/recepteur) mais en même temps enregistrer sur la SD. Si cela marche nous gardons la carte, cependant dans le cas où l'utilisation des 2 cartes sur les mêmes pattes ne fonctionne pas, nous devrons alors en choisir une nouvelle.
Puis dans un troisieme temps, nous allons étudier le capteur de courant HAS 200S. L'inconvénient de ce capteur est que nous ne pouvons pas directement le tester sur le KART, l'installation de celui-ci demande une certaine manœuvre beaucoup trop compliquée pour un simple test. De plus, lorsque le kart est à vide à un courant max de 6A ce qui est très petit pour la mesure sachant qu'il peut monter jusqu'à 200A max normalement.
Par conséquent, tout d'abord nous avons pensé à tester le capteur à l'aide d'une alimentation (source triphasée), Or l'inconvénient est que cela était compliqué car il aura fallut un plan de charge résistif pour le tester. Donc dans un deuxième temps, nous avons décidé, comme pour le capteur de vitesse de le tester en plus petit dans une sorte de simulatiion.

On a choisi un plus petit capteur de courant le HY 5P qu'on va tester avec une alimentation normale et voir ce qu'on aura en sortie pour l'adapter et le convertir en % de batterie. Cette sorte de simulation nous permet de nous faciliter la manœuvre et grâce à ceci, nous n'aurons plus qu' l'adapter au kart une fois fini.
Tout d’abord, nous allons câbler et alimenter ce capteur de cette manière :


0 notes
Text
Séance 11/12
La séance 11 était la séance de la soutenance, nous avons pas avancé sur le projet en lui même.
SEANCE 12 :
Après avoir réussi à convertir le signal de sortie en vitesse et à récupérer la vitesse du kart. Nous allons procéder au schéma électrique du montage effectué durant la manipulation. Le schéma électrique se fera à l’aide du logiciel Eagle où l’on reproduira avec les composants corresponds le montage sur la Labdec.
Le schéma Eagle du montage est le suivant : photo
Après avoir terminé le schéma nous allons ensuite passer au routage de celui-ci.
Durant cette séance nous avons effectué le routage du montage mais nous ne l’avons pas terminé.
De plus nous avons commencé à s’intéresser et à chercher des informations sur notre capteur de courant HAS 200-S. Afin qu’à la prochaine séance nous puissions commencer à travailler sur ce capteur.
0 notes
Text
Séance 10
Nous allons essayer de récupérer un signal carré parfait qui monte et qui descend correctement car on avait en sortie du nouveau capteur ( infrarouge ) un signal qui ne descendait pas jusqu'à 0 V. Pour cela nous avons utilisé un comparateur LM311 nous permettant de récupérer un beau signal.
Après avoir récupéré un signal carré propre nous allons ajouter un variateur qui nous permet d'obtenir du 5V sans passer par un pont diviseur.

On utilise le variateur 7805CV ( milieu masse, droite entree, gauche en sortie). Nous avons branché le variateur en sortie de la résistance de pull up , qu'on alimente en 5V (comparateur).

Donc ensuite en sortie du variateur on obtient finalement bien un signal carré propre de 0 – 5 v et bien carré qu'on pourra envoyer sur la arduino sans aucun problème car la tension est adaptée.
Maintenant à partir de ce signal carré de 0-5V on va pouvoir calculer la vitesse du kart de la même façon que sur la simulation ( sur chaque front montant nous allons calculer la différence entre les 2 périodes récuperée à différent instant t.
On reprend la formule du petit moteur, or on obtient des valeurs trèp petites ( on arrive a 39 km/h max or il devrait arriver min à 70km/h) .
On essaie de trouver une bonne formule qui nous sort un résultat cohérent.
Après quelques essais nous avons trouvé une formule nous donnant la vitesse du kart : (1/période*0,001*6)*2pi*0,15*3,6 et nous avons une vitesse maximum de 59 km/h a peu près. Sur l’ordinateur, on affiche une vitesse de 62 km/h or cela est due à une mesure du rayon de la roue peu précise.
A présent nous passons sur le niveau de tension de batterie du kart.
Nous savons qu'en sortie du capteur de courant nous obtenons une tension image du courant.
Tension max en sortie du capteur de courant : 4V (200A). 54V
Tension minimal en sortie 0V (0A) ( batterie 11*4) 44V
Le client désire qu'à partir de 10% de batterie restante l'écran s'affiche en rouge.
On sait qu'à 10,5*4 batterie morte totalement.
Prochaine séance :
Déterminer ce qu’on obtient en signal de sortie du capteur de courant pour ensuite l’adapter pour avoir la tension et ensuite l’afficher sur l’écran LCD.
0 notes
Text
Séance 9
Nous allons essayé de savoir ce que nous avons en sortie du capteur de vitesse et déterminer la vitesse du kart.

En faisant les tests, on remarque que lorsque la vitesse est trop élevée le capteur ne détecte plus de trous, c'est à dire qu'il voit seulement le fer du disque. Par conséquent le manque de trous engendre un manque de fronts montants.

Du à cela nous avons décidé d’ajouter un nouveau capteur infrarouge OPB 704 ( voir doc technique).

Ce capteur va nous permettre d'avoir la vitesse du Kart, le principe de ce capteur infrarouge est qu'il émet de la lumière et attend de la recevoir. C'est un capteur avec une diode et un transistor NPN composé de 4 fils ( 2 à la masse et les autres sur l'alimentation, voir le schéma pour pouvoir le cablé ).

Nous avons câblé ce capteur sur un montage sur une labdec électronique composée tout d'abord de 1 résistance et d'un potentiomètre.

Après avoir câblé, nous avons récupéré un signal de sortie pas très propre, c'est à dire que le signal carré ne descendait pas en dessous de 5 V quelques fois et montait à 15 V ce qui était problématique par rapport au tension acceptée par la carte arduino, cependant nous avons vu que malgré la vitesse élevé du kart nous avons obtenue toute les périodes sans sauts.

Nous avons essayé de changer les valeurs de résistances que nous avons choisies précédemment en remplaçant par un autre potentiomètre cependant cela ne changeait pas vraiment.
Donc pour remédier à cela nous avons donc choisi un composant qui est le LM311.

C'est un ampli OP que l'on utilisera en comparateur c’est à dire qu'on va comparer avec une tension continue d'un certain seuil variable, et en fonction de ce seuil nous allons obtenue un signal carré propre ( comme la PWM ) qui va nous permettra de programmer sur l'arduino et d'obtenir la vitesse cependant notre signal de sortie atteind les 15 V.


Nous allons l'adapter avec un pont diviseur pour avoir 5v au final pour la carte arduino qui ne supporte que 0-5v .
Le montage est composé de 2 potentiomètres et LM311 avec résistance de pull up et 2 autres ( 1 de puissance). 1 potentiomètre va nous permettre de régler la tension seuil ( pont diviseur ½ pour avoir tension seuil min de 7,5 V).
Les pattes 1 et 4 à la masse, la 2 cest le + le 3 - . Ensuite on récupère le signal final à la patte 7 puis nous allons ajouter une résistance de pull up de quelques kilo ohm et la 8 Vcc ( 15V).

Pochaine séance : récupérer un signal de sortie 0-5V.
Obtenir une vitesse du kart cohérente.
0 notes
Text
Séance 8
Mardi 12 Décembre ( soutenance )
test sur le kart pour savoir ce qu'on récupérait à la sortie du capteur de vitesse. Cependant nous ne comprenons pas ce qu'on obtient en sortie, par conséquent il est impossible de le convertir en une vitesse en Km/h. Nous avons donc décidé de s’intéresser à un autre capteur.
En ce qui concerne le capteur de courant, nous avons interrogé le client nous savons désormais que :
Tension max en sortie du capteur de courant : 4V (200A). 54V
Tension minimale en sortie 0V (0A) ( batterie 11*4=4V)
Chaque batterie est HS à partir de 10.5 V soit 42V pour les 4 batteries réunies.
Pas d'avancement certains problème sur le signal de sortie.
Prochaine séance : comprendre le capteur de vitesse et chercher des solutions afin de résoudre le problème et ainsi obtenir la vitesse du kart.
0 notes
Text
Séance 7
Tout d'abord nous avons essayé d'adapter le programme en ce qui concerne le calcul de la vitesse en fonction du capteur de vitesse propre au kart.
On sait que 1 tour de roue vaut 6 trous mais aussi que le rapport cyclique reste constant et que la fréquence augmente lorsque la vitesse augmente.Ce qui signifie que la période est très petite pour la vitesse max (à vide) du Kart. Or les résultats en sortie étaient totalement incohérents avec la vitesse du kart donc nous avons cherché une autre méthode de calcul.
La tension maximale du kart est de 54V c'est à dire 100% en batterie pleine. Ensuite la tension minimale est de 10,5-11v pour qu’une seule des batteries soit HS.
Nous n’avons pas encore réalisé d'essai sur le KART du au maximum de la tension de sortie du capteur de courant qui nous permettrait d’évaluer le pourcentage de batterie restant. Nous manquons encore d’informations pour pouvoir convertir la tension de sortie en un pourcentage.
Objectif : aller voir le client pour réaliser des essais directement sur le kart, afin de connaitre la tension max + explications capteur de courant . De plus nous voulons savoir si 0% = 0v ou autre une tension?
Essai du calcul de la vitesse ( si cela fonctionne).
0 notes
Text
Séance n°6
Tout d'abord, on essaie d'écrire un programme qui fonctionne correctement c'est à dire que lors de l'interruption n°1 , la valeur nous est retournée pour être affichée sur la carte SD. Si nous ajoutons le programme dans l'ancien programme il pourrait devienir très chargé par ce fait on écrit un programme seulement avec void setup , void loop , void test ( interruption 0), qui est clair et lisible.
Dans le programme, il ne faut pas oublier detachInterrupt(0) qui autorise l'interruption 1 ( patte 3 ). A chaque interruption nous allons déterminer la période totale.
Le programme qui nous permet de recupérer la fréquence et donc la période avec la fonction millis qui nous permet de récupérer une valeur à un instant t on stocke dans une variable ensuite à un autre instant t on a une valeur puis on fait la différence entre les deux valeur et cela nous donne la période d'un front de cela on déduit la période total et la fréquence.
PHOTO PROGRAMME AVEC MILLIS
Nous avons obtenu la période d'un front montant que nous avons multiplié par 24 fronts cela nous donne la période totale. Ensuite avec cela on calcule la vitesse en m/s on sait que 1m/s et 7,5tours = 1 mètre donc 1 tour = 13,3 cm.
De cela on déduit la vitesse en mètres par seconde 13,3 cm *1s/2,3s(période totale).
Ensuite on l'afffiche sur lcd pour voir si cela fonctionne. On otient bien la vitesse sur le LCD.
PHOTO AVEC LA VITESSE LCD
Maintenant on incorpore le programme précédent dans le grand programme de la SD pour récupérer le temps, la tension et la vitesse en même temps sur la SD qui va les stocker et les afficher dans un tableur.
Pour vérifier le fonctionnement de ce programme nous affichons en premier lieu la tension et la vitesse sur le LCD et avec le Switch on arrête le système.
Prochaine séance : Essais et tests de la Carte SD sur le KART.
Savoir la tension maximale et minimale de la batterie afin de pouvoir afficher le niveau de batterie en pourcentage sur le LCD selon la tension qu'on récupère , puis en fonction du niveau de batterie on essaiera d'ajouter les couleurs ( rouge lorsque qu'il reste 10% par exemple ).
0 notes
Text
Séance 5
1] 1ère partie de la séance : Card SD shield
Nous avons réalisé un programme avec la carte SD Shield qui nous permet de mesurer la valeur de la tension à chaque instant t (1 seconde) et ensuite de stocker les mesures dans un tableau. Ainsi nous pourrons déterminer lors du vrai test sur le KART la valeur de tension en sortie maximale que nous avons besoin pour l’avancement du projet.
Ensuite nous avons approfondi le programme en ajoutant des lignes de code ci-dessus ... afin de pouvoir démarrer et arrêter les mesures arrêter selon l’envie de l’utilisateur à l'aide d'un SWITCH.
Après avoir finalisé le programme suivant, nous allons maintenant mesurer la vitesse du kart avec le programme précédent (avec la carte sd). Pour cela nous avons déterminé un mode de mesure à l'aide du capteur encapsulé qui nous donnera des tours par minute que l’on convertira en Km/s et ensuite cette valeur sera enregistrée dans la SD également. Le principe de mesure de la vitesse sera identique à celle de la tension de sortie.

2] 2ème partie de la séance : Prise en main d’un robot ( avec carte moteur )

Le programme de la carte SD terminé, nous sommes passés sur un petit robot composé d’une carte moteur ( arduino ), qui nous permet de pourvoir faire des mesures de vitesses avant de passer sur le vrai kart. Tout d’abord nous avons réalisé un programme permettant de faire tourner les deux roues.
Initialisation des pattes :

Programme permettant de faire tourner les roues gauche et droite :

Ensuite après s’être approprié le programme, nous avons apporté des modifications pour ne faire tourner seulement 1 roue pour les mesures.
Puis afin de déterminer la vitesse du moteur, nous avons récupérer un signal carré sur l’oscilloscope cela va permettre d'obtenir un rapport cyclique de 50% qui ne change pas et le nombre de périodes. Nous obtenons 24 fronts montants ( 24 périodes ). Puis nous mesurons la période totale.
Ensuite on augmente la vitesse du robot, on remarque que la fréquence augmente également. De plus pour récupérer des valeurs de la carte moteur sur notre carte SD nous devons ajouté des lignes de code qui convertira ces données en vitesse. On ajoutera pour cela des interruptions qui va nous permettre d'obtenir la période que l'on convertira pour obtenir une vitesse du moteur à l’aide d’un calcul.
En effet après avoir déterminé les lignes de programme, nous analysons les pattes utilisés sur la card sd shield qui sont les suivantes : D4,D11,D12,D13 sont déjà réservés au départ puis nous utilisons la patte D3 pour l'interrupteur (SWITCH), la D7 pour la LED puis la D2. Cela nous permet de savoir quelle patte nous ne pouvons plus utilisé dans la suite du projet.
Prochaine séance:
Déterminer un calcul correct pour la conversion des données reçues par la carte moteur en vitesse que l’on stockera dans la SD.
-Aller proposer notre idée de la carte SD au client.
0 notes
Text
Séance 4
Tests à l'entrée de l'iut (moins d'obstacles)
Tests sur la portée de transmission de la carte Lora 433 MHz en faisant varier les puissances de la carte :
-P=10 ==> environ 120 mètres
-P=15 ==> environ 210 mètres
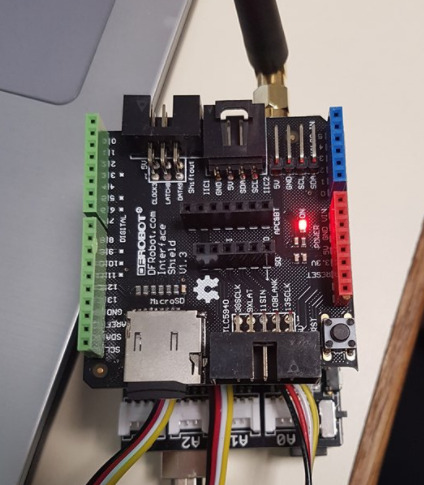
Nous observons un problème avec l'antenne intégrée sur la carte qui est instable ce qui entraîne une réception occasionnelle. Lorsque l'antenne bouge ( coup de vent) la réception est faite une fois sur trois donc il faut changer l'antenne afin que la réception soit plus stable pour cela on va faire les tests avec une antenne externe :
Pour P=23 ==> environs 220-230 mètre avec la grosse antenne.
Donc on constate pas de grandes différences au niveau de la distance or la réception se fait de manière plus régulière.
2.Tests Parking ( tout à droite au fond ) – ligne droite pour la carte Lora 868MHz :
On commence pour une puissance :
P=10 ==> iut – fin du rond point
P=15 ==> Environ 300 mètres
P=18 ==> Environ 350 mètres
3.Choix de la carte en fonction de l'utilisation du carte.
Pour le choix de la carte on doit comparer les caractéristiques de ces deux cartes notamment :
- la puissance de transmission qui est égale pour les deux carte c'est à dire pour +20 dB on à une puissance de 100 mW.
- Le courant Rx , pour la 868 Mhz nous avons 30mA pour 10,3 mA pour la carte 433 Mhz.
- La portée de transmission des données. La carte Lora 868 Mhz aura une plus grande portée or dans notre cas, le but est de faire fonctionner le Kart sur le parking de l'IUT donc la portée de la Lora 433 Mhz sera suffisant.
On remarque que la carte 433Mhz consommera beaucoup moins c'est pour cela que l'on choisira donc la Carte Lora 433 Mhz pour notre projet car elle est mieux adaptée. De plus on ajoutera une antenne radio sur la carte pour recevoir les valeurs de façon stable.
4.Modification du programme initial :
Le client d��sire démarrer et arrêter le système à l'aide d'un switch. Pour cela on ajoute des lignes de programme afin que la couleur présente sur l'écran LCD passe du vert au rouge. Tout en gardant la mesure de la température dans un premier temps. Puis ensuite que le LCD s'allume ou s' éteind en fonction de la position du SWITCH.

5. Prise en main de la carte SD :
- Compréhension du fonctionnement de la carte SD
- Création d’un programme afin de récupérer des valeurs dans un tableau.
Prochaine séance :
Faire les vraies mesures sur le carte pour essayer d’obtenir la tension maximale en sortie.
0 notes
Text
Séance 3
1] Suite de la séance 2 : création du programme (transmission de température)
En premier temps nous avons continué le programme Arduino sur l’envoi de la température vers une autre carte 433MHz, malheureusement nous avons rencontré quelques problèmes sur la conversion d’un float vers un char, puis enfin après de nombreuses recherches nous avons réussi à faire la conversion et ainsi fonctionner le programme envoyer la température de la pièce vers un autre PC.

2] Prise en main de la Carte Lora 868 MHz :
Tout comme la première carte nous avons essayé de comprendre son fonctionnement. Pour cela nous avons récupérer les programmes Receiver and Transmitter fournis par l’ancienne carte en changeant seulement la fréquence du programme. Ensuite nous avons commencé à tester la portée pour une puissance maximale de 23. Cette puissance a une distance de transmission d’environ 200 m.
Prochain cours :
Nous allons tester la carte sur une ligne sans obstacle pour observer si les bâtiments ou les murs empêchaient la transmission.
Puis nous allons déterminer la carte la plus adaptée à notre projet en fonction de sa consommation et de la portée de transmission.
0 notes
Text
Séance 2 (09/11/17)
1] Recherches d’informations
Tout d’abord nous avons cherché toute la documentation et les informations nécessaire sur la liste des composants fournis afin de comprendre et tester leur fonctionnement et ainsi pouvoir sélectionner les composants appropriés pour notre projet.

- Carte 433 MHz
- Carte 868 MHz
- Transcodeur
- Shield Radio
- Modem 433 Mhz

- Afficheur
- Carte uno ..

- Afficheur LCD

- Plantine Grove

2] Prise en main de la carte 433 MHz
a) Compréhension de la carte :
Nous avons examiné les programmes fournis dans les documentations de la carte, c’est à dire que l’on a testé un programme arduino nommé “ Transmitter “ qui nous permettait de d’envoyer un message vers une autre carte 433 Mhz.
Initialisation :

Ensuite cette ligne de programme est importante :

Ligne qui détermine le message :

Ensuite nous sommes alors passés du côté récepteur avec un autre programme arduino nommé “ Receiver ” qui nous permettait de recevoir le message envoyé par l’autre carte 433 Mhz mais également pouvoir lui répondre à notre tour.

Après avoir testé ces programmes, nous avons analysé les lignes du programmes puis nous avons remarqué la ligne qui fixait la puissance.
Puis nous avons conclu que selon la puissance fixée dans le programme, et déterminé environ la distance de portée de transmission des données.
Pour déterminer les longueurs en fonction des puissances nous avons réalisé quelques tests.
b) Réalisation d’un programme avec la carte de transmission 433 Mhz :
Nous avons à partir des programmes fournis dans les documentations et à l’aide du programme que nous avions réalisé en séance 1 (Capteur de température + affichage LCD) créé un 3 éme programme qui n’est rien d’autre que le mélange des deux précédents afin de collecter la température de la pièce, afficher la valeur sur l’écran LCD, sur l’écran du PC mais aussi l’envoyer sur une autre carte de transmission 433Mhz, nous avons rencontré un premier problème en effet, la variable collectée est de type float, et la carte de transmission ne peux envoyer que des variables de type char.
Prochaine séance :
- Il faudrait trouver un moyen de convertir une variable float en variable char. Ensuite tester le fonctionnement du programme.
- Prise en main et tests de la Carte de Transmission 868 MHz (Rb-Mkf-13) .
0 notes