
Давайте делать роботов. Я уже начал. Планы большие. Пока буду рассказывать, что и как получается.
Don't wanna be here? Send us removal request.
Statistics
We looked inside some of the posts by slava-robotam and here's what we found interesting.
Average Info
Notes Per Post
20
Likes Per Post
17
Reblog Per Post
2
Reply Per Post
1
Time Between Posts
15 days
Number of Posts By Type
Text
8
Video
5
Photo
4
Last Seen Tumblr Blogs





Fun Fact
Tumblr was attacked by a cross-site scripting worm deployed by the Internet troll group GNAA on Dec 3, 2012.
Text
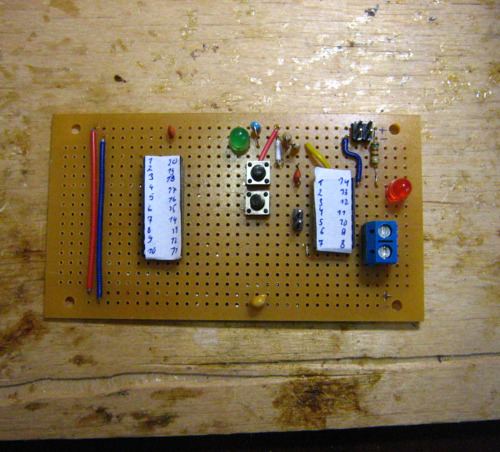
Демонстратор руки

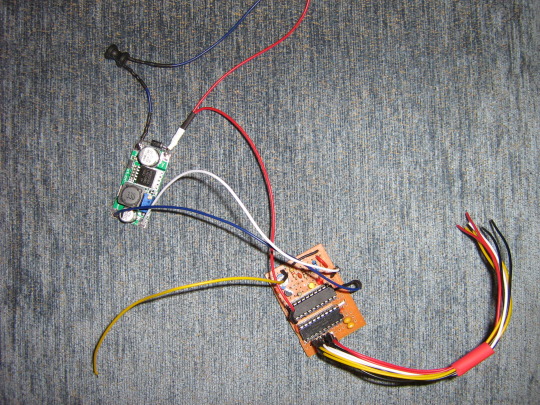
Я писал, что есть рука и контроллер, управляющей ею: "Драйвер управления рукой". Вот демонстрация работы руки. Пока основная цель руки - раздавать визитки. Скоро она будет это делать в торговом центре на промо-акции. Я решил доработать процесс, чтобы был не нужен ноутбук.
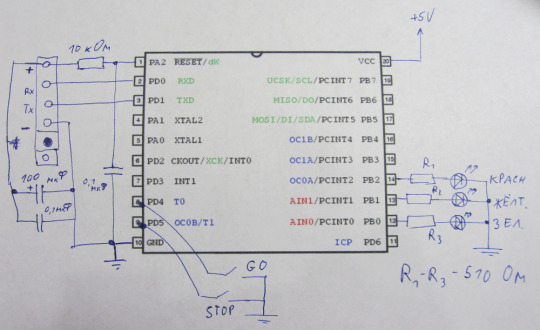
Я поместил в пластмассовый корпус МК Attiny2313 и записал в него программу, осуществляющую подачу визитки.
Питается коробочка прямо от руки. Общение идёт через UART. Собственно, используется всего 4 провода: +, -, RX, TX. Параметры UART:
· Communication Parameters: 8 Data, 1 Stop, No Parity
· USART Mode: Asynchronous
· USART Baud Rate: 9600
Принцип работы:
· Первое нажатие зелёной кнопки - взять визитку.
· Второе нажатие зелёной кнопки - отдать визитку.
· Красная кнопка - аварийное отключение руки. Замигают зелёный и красный светодиод, рука отключится. Далее зелёная кнопка действовать не будет.
Сигнальные светодиоды:
· Зелёный - признак что есть питание. При включении несколько раз мигает, затем просто горит.
· Желтый - признак, что есть соединения (поступают данные от руки).
· Красный - признак какой-то ошибки.
В Attiny2313 мало памяти, поэтому пришлось разработать сокращённый вариант хранения последовательности управляющих команд. Для этого я доработал программу для разработки скрипта. Появилась копка "В формате для прошивки данных в МК". Исходные коды программы (проект для Visual C++).
Для хранения данных в внешних МК для управления рукой используется следующий сжатый формат данных:
· 0x10 - Подать напряжение на все сервоприводы. Но они включаются не сразу, а по очереди с задержкой.
· 0x20 - Отключить подачу напряжения для всех сервоприводов.
· 0x3X - Подать напряжение на сервопривод. X - номер сервопривода.
· 0x4X - Не подавать напряжение на сервопривод. X - номер сервопривода.
· 0x5X 0xYY - Установить значение ШИМ. X - номер сервопривода. Далее следует байт YY, задающий положение. Таким образом диапазон значений от 00 до 99.
· 0x6X 0xYY - Задержка в микросекундах (1/100 сек). X старшая часть YY - младшая. Итого диапазон значений от 0 до 0xFFF (4095). Т.е. можно задать время от 0 до 4 секунд.
Внутренне устройство:
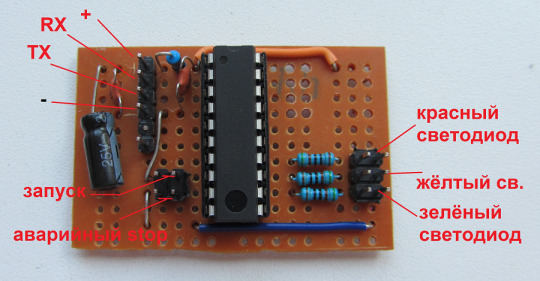
Схема:
И последнее, собственно текст программы для МК: проект для CodeVisuonAVR.
1 note
·
View note
Video
tumblr
Недавно я писал, что сделал схему для управления рукой с компьютера. Вот первый пример использования. Рука выдаёт визитки и буклеты. Так больше шанс, что информации о предложении останется в памяти посетителя.
#механическая рука#слава роботам#славароботам#робототехника#необычная реклама#применение роботов#сделай сам
5 notes
·
View notes
Text
Драйвер управления рукой
Для различных задач требуется управлять рукой с клешнёй, содержащий 6 сервоприводов. Решил, что удобно будет сделать отдельный силовой блок, который возьмёт на себя функции управления рукой и с которым можно будет общаться через UART.
Задачи, которые решает блок:
Позволяет подавать питание на выбранные сервоприводы.
Измеряет падение напряжения на сервомоторах.
Удерживает каждый из сервомоторов в заданном положении.
Управляется по UART или через USB с компьютера (виртуальный COM-порт).
Общий вид:

Рассмотрим отдельные элементы управляющего устройства
Силовая часть
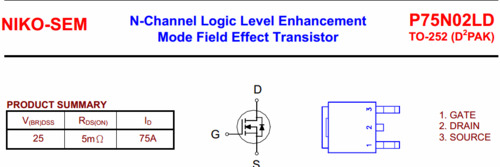
Силовая часть, подающая напряжение на сервоприводы построена на основе полевых транзисторов P75N02LDG. Соответственно их используется 6 штук.
Вот как расположены ножки у транзистора:
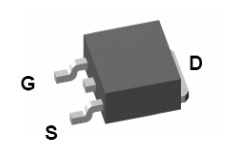
Их я расположил на отдельных платках, так как на одну схему у меня всё не умещалось:
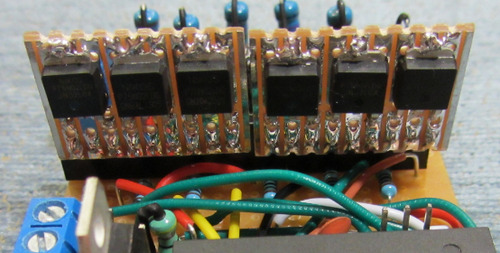
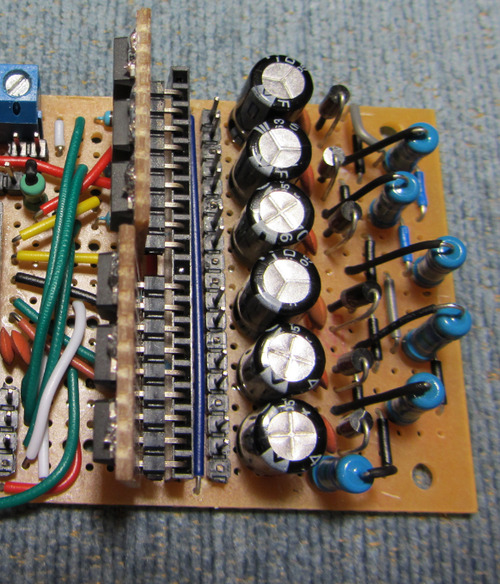
Схема позаимствована из статьи "Сенсорная крышка для мусорного ведра своими руками". Вот фрагмент этой схемы:
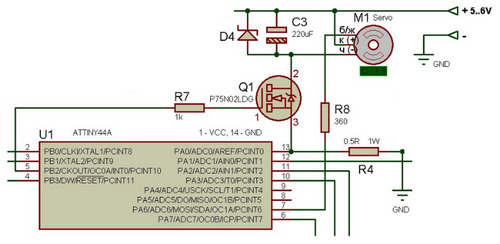
Есть небольшие отличия. Резистор R4 у меня не на 0.5 Ом, а на 0.75 Ом (на 0.5 не было). Думаю, этот резистор не сильно уменьшает мощность сервоприводов.
В качестве защитного диода Шотки D4 использую 1N5817 (20 V, 1 A).
Конденсатор C3 у меня имеет ёмкость 470 мкФ плюс я добавил ещё керамический конденсатор на 0.1 мкФ.
Некоторые рассуждения на тему мощности устройства и питания
В руке используются сервомоторы MG995. В интернете встречается упоминания, что в заклинившем положении этот сервомотор может потреблять до 2 А. Мои наблюдения это подтверждают. Именно 2A я не видел, но точно было более 1.5А. Так что цифра 2А вполне реальна.
Теоретически все сервомоторы могут дать 2*6=12А. Но это если они заклинят все сразу, что маловероятно.
Я использую блок питания на 6 V, мощностью 5 А. Но предохранитель я поставил на 4A.
Пока по наблюдениям потребляемый ток не превышал 3А. Так что я думаю всё будет нормально работать.
P.S. По моим прикидкам, можно питать блок и напряжением 7.5 Вольт. Хотя сервомоторы рассчитаны на 4.8-7.2 Вольта. Произойдет падение напряжения на резисторе сопротивлением 0.75 Ом. Да ещё падение напряжение из-за амперметра. Так что по моим (возможно неверным подсчётам) на сервомоторе будет даже меньше 7.2 Вольта. Да и вообще в интернете люди пишут, что питают MG995 от 7.5 Вольт и всё нормально.
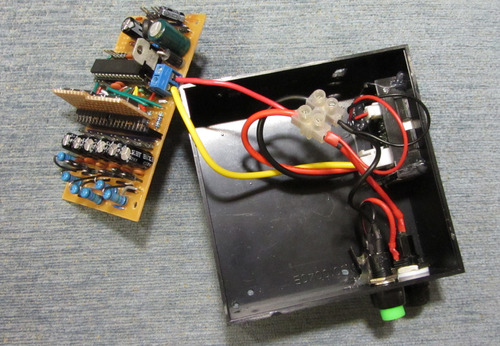
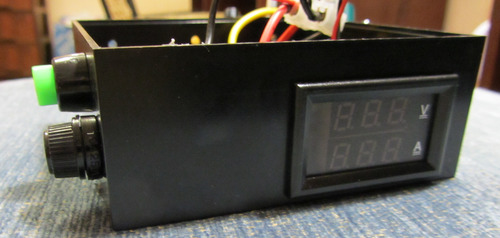
Корпус
На корпусе расположен вольтметр и амперметр, предохранитель, разъем питания, USB разъем и прочие выводы.
Виртуальный COM-порт:
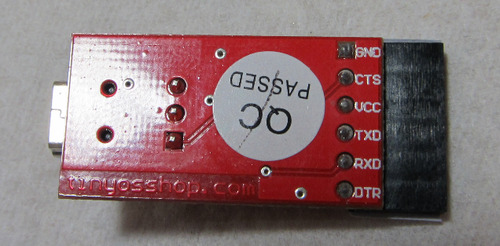
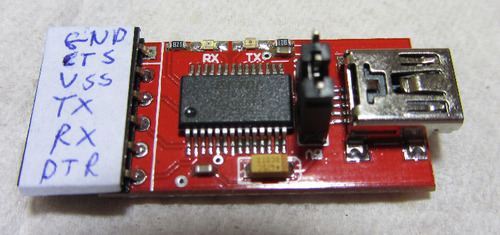
Назначение перемычек:

Виртуальный COM-порт соединён перемычками с UART микроконтроллера. Можно из вытащить и напрямую подавать сигналы на UART. Сейчас стоят три перемычки. Замкнута земля и соединены TX<->RX, RX<->TX.
Схема
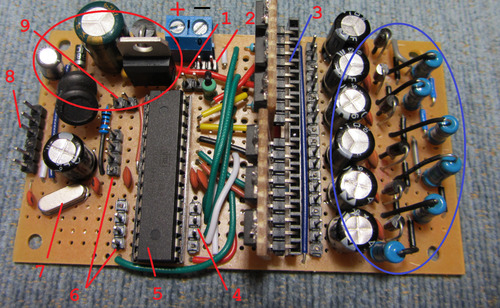
Красным обведена часть схемы, отвечающая за развязку силовой части схемы и питания МК. Общая идея - стоит диод и большой конденсатор. При падении напряжения МК начинает питать от конденсатора.
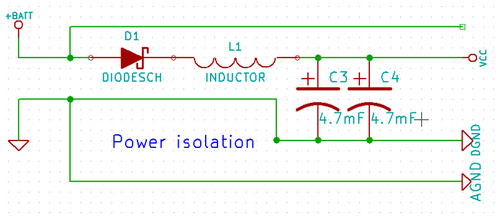
Подробнее про это рассказывается в статье "10 советов по использованию микроконтроллеров AVR в системах с двигателями".
Для получения напряжение 5 V используется стабилизатор питания L7805. Радиатора нет, так как МК потребляет очень мало.
Синим обведены элементы, относящиеся к обвязке силовых полевых транзисторов P75N02LDG.
+5 Вольт.
GND.
6 полевых транзисторов.
Случайно сделал выводы. Никак не используются.
ATmega8A.
Выводы для подачи ШИМ сигнала на сервоприводы. Сверху вниз в программе они соответствуют именам: A, B, C, D, E, F.
Кварцевый резонатор на 12 МГц.
Выводы для управления МК через UART. Сверху вниз: RX, TX, (пусто), GND, +5V.
Контакты, подсоединённые к RESET. Никак не используются.
Настройка FUSE для МК
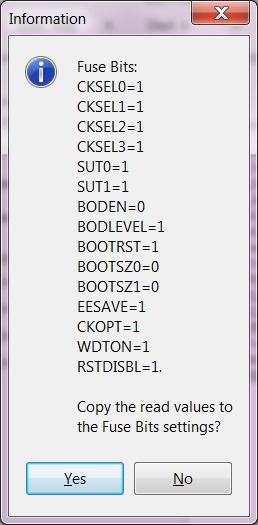
МК настроен на использование кварцевого резонатора. Плюс включена перезагрузка при падении напряжения ниже 2.7V.
Текст программы
Текст программы доступен здесь: https://yadi.sk/i/3siwGaS6cymXi
Принцип работы программы
При старте программа выводит строку [START]. Это позволяет внешней программы узнать, что МК включился или перезагрузился.
Затем программа постоянно измеряет напряжение на резисторах (см. схему) и распечатывает эти данные.
Эту печать можно отключить, послав символ 'd'. Так удобно работать с программой через терминал.
Другие команды:
'_' Распечатка внутренних данных для отладочных целей.
'*' Подать напряжение на все сервоприводы. Но они включаются не сразу, а по очереди с задержкой.
'#' Отключить подачу напряжения для всех сервоприводов.
'+' Подать напряжение на сервопривод. За плюсом следует буква от A до F означающая номер сервопривода.
'-' Не подавать напряжение на сервопривод. За минусом следует буква от A до F означающая номер сервопривода.
'=' Установить значение ШИМ. Далее следует буква от A до F означающая номер сервопривода. А затем две цифры. Таким образом диапазон значений от 00 до 99. Пример команды: =B10
В случае внутренних ошибок МК распечатывает соответствующую информацию и прекращает работу.
Параметры UART:
Communication Parameters: 8 Data, 1 Stop, No Parity
USART Mode: Asynchronous
USART Baud Rate: 9600
4 notes
·
View notes
Video
tumblr
Демонстрация поля, описанного ранее. Быстро не получилось понять, как повернуть видео. Но думаю в целом всё видно.
2 notes
·
View notes
Text
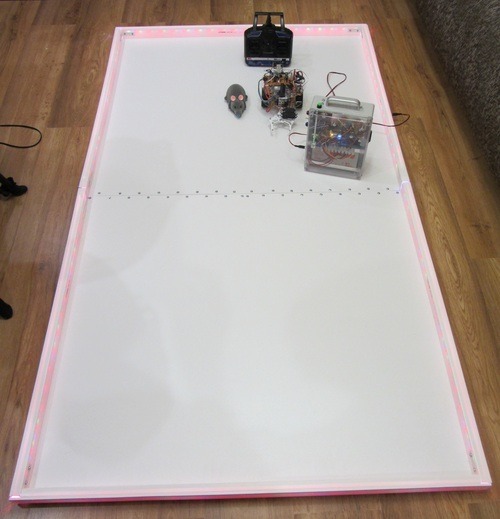
Игровое поле
Есть определённые планы по созданию игр на базе роботов и использованию их на детских праздниках. Подробности будут потом. Пока этот текст больше самому себе, чтоб не забыть, как и что я делаю. :) Сейчас о игровом поле, на котом будут проходить некоторые виды игр. Одна из игр - ловля мышей. Рассказ как я делал это поле и адаптирую игрушечных мышек.
Игровое поле представляет собой площадку с бортиками, в которой будет осуществляться игры радиоуправляемых роботов. Стенки поля для красоты подсвечиваются изнутри. Дополнительно в состав поля входит вспомогательный блок, обеспечивающий питание подсветки и управление движением мышек.
Общий вид:
Поле
Поле состоит из одного листа, лакированная ДВП, разделённого на две части. Между собой эти части соединены с помощью рояльной петли. По кроям прикреплён бортик, сделанный из короба для проводов. Внутри короба расположена трехцветная светодиодная лента, питаемая через специальный разъем (12V).
Светодиодная лента прикреплена внутри бортика с помощью клеевого пистолета. Очен ьполезная вещь:

Для крепления бортика к ДВП использованы обыкновенные винты. Дольше всего думал, как провести провод от одно половинке к другой. Боялся что обыкновенный провод быстро сломается от пистонных перегибов при складывании поля. В результате использовал кусочек провода от компьютерной мышки. Он рассчитан на большое количество сгибаний.
Снизу к полю по краям приклеены "набойки" (не знаю, как они правильно называются). Во-первых, это поможет случайно не оцарапать пол выступающими головками винтов. Во-вторых, разная толщина наклеек делает так, что центр чуть-чуть ниже, чем края. Этого должно быть достаточно, чтобы при игре в мячик, тот не останавливался у самого края где его трудно "пинать" роботом. Мячик должен неспешно скатываться к центру, или по крайней мере немного откатиться от бортика.
Фотография поля сзади:

Адаптированные мышки
Для одного из вида игр будут использоваться радиоуправляемые мыши, которые должны хаотично носиться по полю. Управление мышками осуществляет специальный блок про который будет рассказано ниже.
Мыши куплены в интернет магазине. Типичный вид:

Можно найти на E-Bay, введя что-то типа: RC Mouse Funny Wireless Remote Control Rat Toy For Cats Dogs Pets.
Адаптация мышек заключается в следующем:
1) Хвост заменяется на мягкий шарик из шерсти (пока не сделано). Есть две причины для этого. Во-первых, пластмассовые хвосты задраны вверх и когда мышь движется назад, то может с разгона "залететь хвостом на бортик". Из-за этого ведущие колеса отрывается от пола и мышь застревает. Во-вторых, этих мышей надо хватать роботами. Их можно ухватить только за голову, т��к как зад мыши слишком толстый для руки робота. Поэтому и нужен круглый мягкий хвост, за который тоже можно хватать.
2) Черный пластмассовый нос оставляет на белых бортиках черные царапины. Поэтому он заменён на резиновую "пипку", взятую из старого CD-ROM. Там эти "пипки" служат амортизаторами площадки. Фотографировать не стал, так как думаю можно придумать массу других вариантов из чего сделать мягкий нос.
3) Внизу сделана дырка через которую можно заряжать мышку не вытаскивая аккумуляторы.

Первый раз получилось не очень аккуратно, но всё равно отверстие снизу и его никто не видит. Разъем бесхитростно прикреплён с помощью клеевого пистолета.
4) Последняя доработка касается подключению разъема для зарядки к аккумуляторному отсеку. Поставлен предохранитель на 0.5A. На всякий случай. Вдруг к разъем я или кто-то ещё воткнет что-то не то. Со временем будет много разных устройств и сделать везде защиту от неправильного подключения я не смогу. У меня просто не хватит столько разновидностей разъемов. Дополнительно предохранитель защитит от слишком большого тока заряда. Про это чуть ниже.
Итого (пока без хвоста) получилось вот так:

Теперь о питании мышек. В них я установил 3 аккумулятора Ni-MH AAA 1800mAh 1.2V.
Заряжать Ni-MH аккумуляторы самодельным устройством не очень просто, так как сложно определить момент окончания зарядки. Вот хороший документ на эту тему: Немного о зарядке NiMH и NiCd аккумуляторов.
Так что надо ещё будет подумать, как сразу заряжать несколько мышек. Пока буду заряжать мышки поочередно используя универсальное зарядное устройство.
Заряжать буду сразу три последовательно соединённых аккумулятора. Это плохой режим для зарядки, но вытаскивать каждый раз аккумуляторы из отсека слишком муторно. Крышка отсека крепится на шуруп, который нужно выкручивать.
NiMH можно заряжать током 0.1-0.3C (C - емкость аккумулятора в ампер-часах). Можно и большим током, но лучше не надо.
В мышках заявленная емкость акумуляторов 1800 mAh. 1.8 * 0.2 = 0.36 A. Смело округлим до 0.4A.
Итак, аккумуляторы надо заряжать током в 0.4A.
Про напряжение говорить смысла нет, так как его должно выбрать зарядное устройство, чтобы обеспечить нужный зарядный ток. Это напряжение будет постепенно увеличиваться.
Дальше начинается некоторая путаница на форумах касательно зарядки последовательно соединённых элементов. Мол говорят раз у нас несколько батарей, то их ёмкость надо просуммировать и соответственно ток заряда надо умножить на количество батареек.
Не слушайте. В интернете масса неправильных и даже вредных советов. Вспоминается, как я видел на Mail.ru ответ на вопрос: "как узнать где первичная обмотка у трансформатора". Ответ: "где толще провода в обмотке, ту и суй в розетку". Шутники...
Раз все элементы соединены последовательно, то и ток через все элементы протекает одинаковый.
Итого, зарядный ток трёх последовательно соединенных аккумуляторов (Ni-MH 1800mAh) будет 0.4 A.
Последний момент касательно разъема для подключения зарядки. Что-бы не перепутать полярность я сделал 3 контакта. Посередине плюс, по краям минус. Так что, как не подключи, всегда будет правильно.
Блок питания и управления
На блок возложены две основные функции:
1) Автономно питать подсветку поля от внутреннего аккумулятора (12 Вольт).
2) Управление мышками для их хаотичного движения по полю.
Общий вид:

Дополнительно блок позволяет:
1) Заряжать аккумулятор при подключении его к сети 220 Вольт.
2) Возможность работы от сети 220 В, если аккумулятор разряжен.
Устройство состоит из двух почти независимых частей. Первая - собственно блок питания. Вторая - управление мышками. Рассмотрим их отдельно.
Блок питания
Блок питания выполнен на базе ADD-55A. Я про него писал ранее в блоге: ADD-55A. Устройство меня немного подвело. Вернее, одно из его описаний, увиденных мною в интернете. Там сказано, что ADD-55A может включаться от аккумулятора при отсутствии сети. Это не так. Видимо описание из интернета как обычно наврало. В datasheet я ничего такого не нашел, хотя оно тоже оставляет желать лучшее. Вообще про это устройство очень мало информации.
Так вот, устройство питается от сети и постоянно подзаряжает аккумулятор. Если напряжение пропадает, переключается на аккумулятор. Но просто, если подключить аккумулятор, то устройство не включается и на выходе нулевое напряжение. Обязательно нужна сеть для "старта". Печально. Из-за этого схема тала сложнее, чем я планировал. Возможно, ADD-55A можно как-то "доработать напильником", но как я не знаю. Если кто-то подскажет - буду весьма благодарен.
Принципиальная схема:
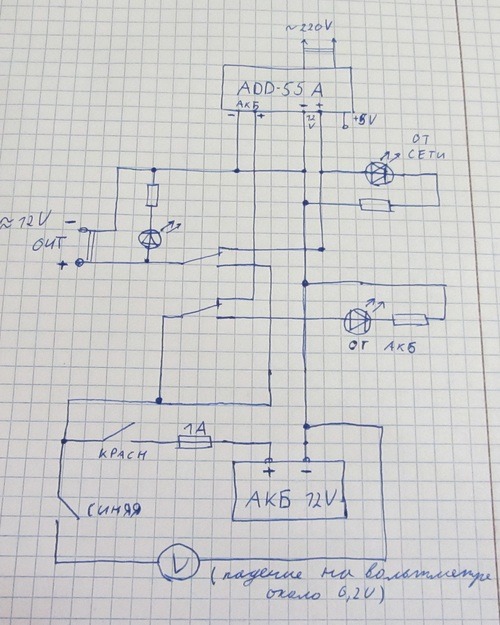
Управление:
Переключатель. Положение (на схеме) вверх: работа от сети и заодно заряжается аккумулятор. Положение (на схеме) вниз: аккумулятор отключен от ADD-55A и питает внешние устройства.
Красная кнопка. Подключает аккумулятор к остальной схеме. Если красная кнопка не нажата, то остальные устройства могут работать только от внешней сети 220V.
Синяя кнопка. Подключает к аккумулятору вольтметр.
Имеется 3 сигнальных светодиода:
Яркий белый. Горит, когда на выходе есть напряжение.
Желтый. Подключен аккумулятор.
Зеленый. Подключена сеть 220V.
Ещё хотел использовать информацию от ADD-55A, разряжен аккумулятор или нет, но так пока и не сделал.
Внутри находится аккумулятор GP 17-7. Характеристики:
Номинальное напряжение: 12 V.
Ёмкость: 7 Ah.
Напряжение для постоянной подзарядки: 13.6 - 13.8 V.
Напряжение для циклической зарядки: 14.1 - 14.4 V.
Максимальный ток в начале заряда: 2.1 A.
Я рассчитываю не подключать к аккумулятору нагрузку, чтобы потреблять более 1 А. Ток заряда от ADD-55A не превышает 0.23A. Поэтому, я присоединил к аккумулятору предохранитель на 1 A.
Часть, относящаяся к блоку питания:
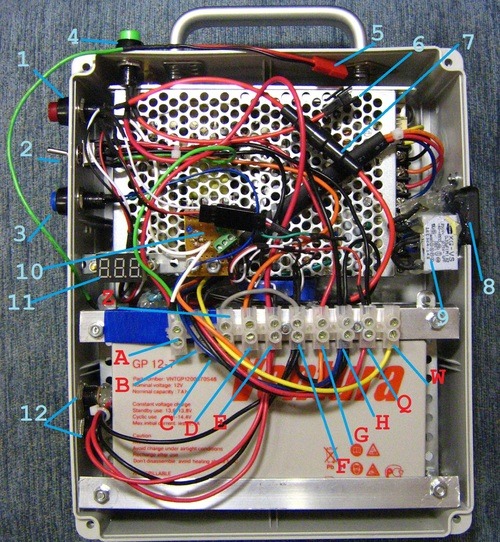
1 - Подключение аккумулятора.
2 - Работа внешних устройств от сети или от аккумулятора.
3 - Подключение вольтметра.
4 - Подключение питания для второй части устройства (управление мышами)
5 - Подключение запасной антенны (представляет собой крепеж аккумулятора из алюминиевых уголков).
6 - Питание второй части для управления мышками.
7 - Предохранитель (1А).
8 - Питание от сети 220V.
9 - Конденсатор - фильтр (был уже на разъеме, не стал убирать).
10 - Платка с сигнальными светодиодами. Два пока не используются.
11 - Вольтметр.
12 - Выходы для питания игрового поля или иных устройств.
A - Плюс от аккумулятора после красной кнопки.
B - Используется для крепления резистора.
C - Резистор, чтоб не слишком сильно светили белые светодиоды (признак, что есть питание).
D - (не помню)
E - "Выходной" плюс.
F - Общая земля.
G - От ADD-55A - плюс для зарядки аккумулятора.
H - Общая земля.
Q - От ADD-55A - плюс 12V.
W - От ADD-55A - плюс 5V (не испольузется).
Z - Земля. Используется для крепления резистора.
Управление мышками
Все мышки управляются одним радиосигналом. Схема временами подаёт сигнал для движения вперёд или назад. Частота движений и паузы между ними задаются с уровнем сложности (их три).
Платки, взятые из пультов управления мышками, выглядят крайне хлипкими. Поэтому я решил продублировать эту часть. Используется две платки и две разные антенны. Если что, можно быстро перейти на резервное устройство.
Сама схема:
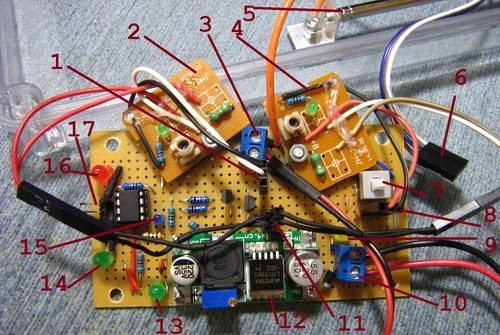
1 - Питание основного передатчика. Какой передатчик питать, выбирается кнопкой 7.
2 - Основной передатчик (взят из пульта мыши). При подаче напряжения на плате горит зелёный светодиод. Плата рассчитана на 3 Вольта, но здесь подаётся 4 Вольта.
3 - Контакты для подключения антенн. Сверху - к основному передатчику.
4 - Запасной передатчик.
5 - Антенна для основного передатчика.
6 - Ра��ъем от переключателя. Подсоединяется к (17).
7 - Кнопка выбирает, на какой передатчик подавать питание.
8 - Питание запасного передатчика.
9 - Желтый светодиод. Горит, когда выбран средний уровень сложности.
10 - Разъем для питания.
11 - Контакты для подачи управляющих сигналов на передатчики.
12 - Стабилизатор напряжения. На выходе настроено напряжение 4 Вольта.
13 - Признак что есть питание.
14 - Зелёный светодиод. Горит, когда выбран простой уровень сложности.
15 - Синий вспомогательный светодиод для отладки.
16 - Красный светодиод. Горит, когда выбран сложный уровень сложности.
17 - Подключение переключателя для задания уровня сложности.
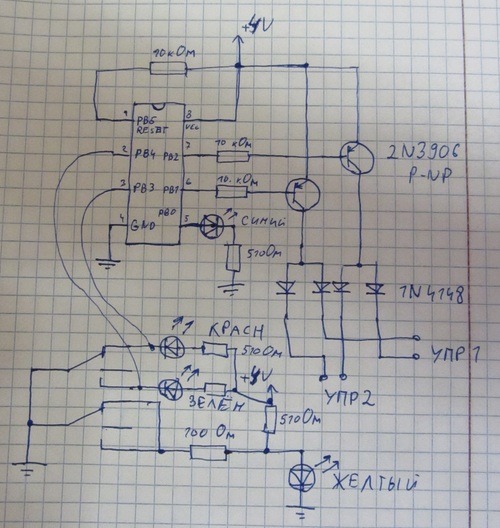
Принципиальная схема:
Текст программы я загрузил сюда: https://yadi.sk/d/5-JEQhkKcbn2k
Программа предназначена для CodeVisionAVR.
Тестовое испытание: (см. следующий пост в блоге).
2 notes
·
View notes
Photo

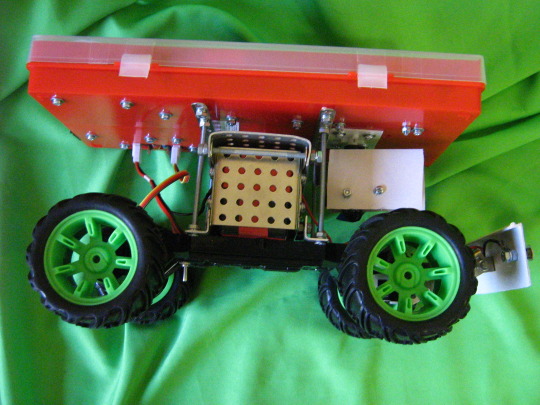
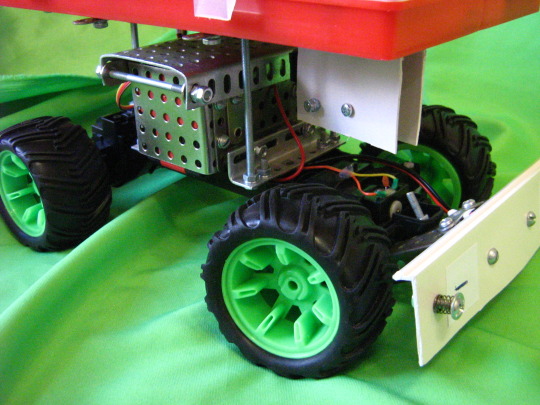
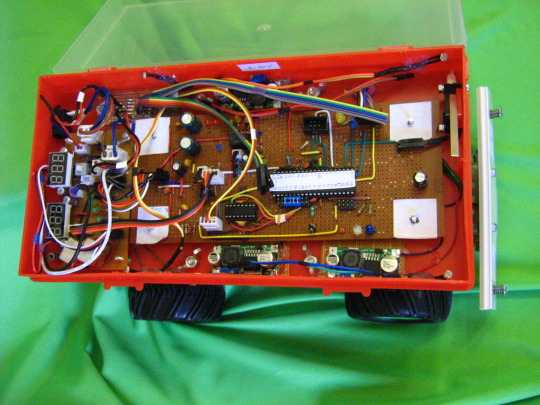
Продолжаю потихоньку делать робота на котором тестирую разные схемы и решения. Например, научился измерять напряжение аккумулятора. Поработал над остановкой, когда робот врезается.
В предыдущем роботе, про которого я ещё не рассказывал, для обнаружения препятствий я использовал ультразвуковые дальномеры. В этом используются инфракрасные датчики.
Оказалась, что оба варианта весьма ненадёжны. Крайне много вариантов, когда робот врезается/застревает, но датчики это не обнаруживают. Поэтому испробовал дополнительный способ обнаружения пробуксовки. Когда робот буксует напряжение питания "проседает". Это можно обнаружить и остановиться. Рез��льтат весьма мне понравился. Когда буду подробно описывать робота, расскажу про это.
Ещё пробовал ехать в наиболее освещенное место. Получилось плохо. Вернее, совсем не получилось. Буду пробовать дальше.
К сожалению, всё идёт медленно. Плюс отвлекаюсь на разное другое. Например, задумал сделать табло, отображающее количество посетителей на сайте viva64.com.
1 note
·
View note
Text
Маленькое упрощение при пайке микросхем
Некоторые мои заметки, могут показаться читателю странными и слишком мелкими. Дело в том, что этот блог является своего рода подготовкой материала к написанию более полноценных и тяжеловесных статей. Сейчас я записываю всё подряд, чтобы потом не забыть. Вот как раз одна из таких пометок на память.
При пайке разъемов для микросхем, я начал приклеивать на ним вот такие бумажки с номерами выводов:
Использую для этого самоклеющуюся бумагу от принтера. Очень удобно. Не нужно постоянно считать, где какая нога. Ускоряет процесс пайки и избавляет от "чертыханий" по поводу не туда припаянной детали.
0 notes
Text
Посещение фестиваль-шоу do-it-yourself
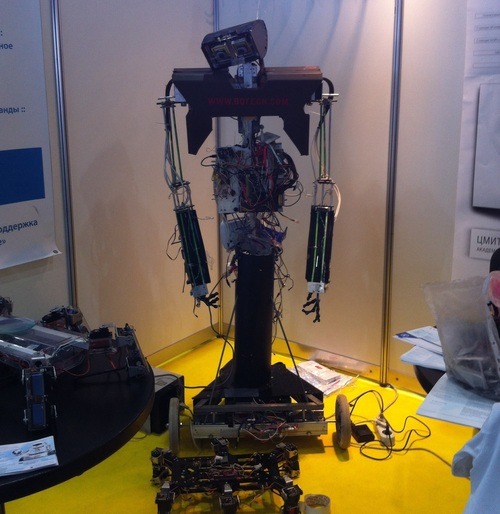
Посетил с женой первый в России фестиваль-шоу формата do-it-yourself (сделай сам). Ссылка: http://www.makeitshow.ru/
В основном меня интересовала секция, посвященная робототехнике, а её дизайну. Не скажу, что полностью разочаровались, но ничего интересного для себя не нашли. Если кому-то интересно, как и что было, рекомендую посмотреть фотки и почитать комментарии, например, здесь: https://vk.com/makeitshow
В целом, вся робототехника свелась к 3D-принтерам, кружкам/факультетам робототехники и квадрокоптерам.
Решил сделать эту заметку только из-за того, что сделал для себя 3 вывода. Решил их записать. Думаю, так я их лучше сформулирую и лучше запомню на будущее.
1. Не посылайте на выставку сотрудников, которые не могут отвечать на вопросы. Конечно, если вы предлагаете конструкторы для детей, это допустимо. Но, если вы предлагаете сложную технологию, то создатели должны быть на месте сами и всесторонне объяснять, что и зачем они делают. Если руководители не готовы к такому, то лучше вообще не участвовать. Пустая трата денег. Самому себе: Андрей, помни это! Как только возникнет желание участвовать в конференции и т.п., связанной с программированием и поставить там стойку про PVS-Studio - надо ехать самому. Даже если не хочется. Иначе всё это бестолково и бесполезно.
2. Нужно обязательно писать большими и крупными буквами, кто вы и что делаете. Серьезно. Это так просто, что никто про это не думает. На конференции это было очень заметно со стороны. Везде какие-то роботы, физические эксперименты, какие-то 3D принтеры. И невнятные надписи на стенах. Мне названия компаний ни о чём не говорят. Вот чем ваш робот отличается от того? А.... Оказывается, это реклама кружка робототехники, а вот там заманивают на кафедру будущих студентов. Вот так и напишите! КПД можно увеличить в несколько раз, написав вот такие надписи черными большими буквами:
"Приводите ваших детей в наш кружок робототехники"
"Хотите делать роботов - наш институт ждёт вас"
"Закажите эти прикольное шоу физических опытов на день рождение ребенку"
"Вы можете купить у нас супер конструкторы"
Самому себе: Андрей, ты хорошо видел, как со стороны всё не понятно. Никогда не пиши на плакатах ООО "СиПроВер", и названием PVS-Studio тоже увлекаться не стоит. Пиши: Ищем ошибки в программах на Си++ и тому подобное.
3. Если проводятся мастер классы, то на стендах обязательно надо написать расписание. Нет расписания - нет желающих. Не набираются желающи�� - нет мастер класса. Замкнутый круг.

1 note
·
View note
Video
tumblr
Я жаловался, что платформа от игрушечной радиоуправляемой машины слишком слабенькая. "Пересадил" экспериментального робота на гусеничную платформу TK-100. Дело пошло гораздо лучше!
0 notes
Photo

Приглашаю подписаться на мой блог всех, кто увлечён электроникой и робототехникой.
0 notes
Text
ADD-55A




Сегодня пришла посылка - источник питания ADD-55A. Раз он у меня сейчас в руках, то сразу и расскажу об этом устройстве.
В предыдущей заметке я рассказал, что делаю робота, который сам должен находить источник питания и подзаряжаться. Правда, как я там описал, я столкнулся с проблемой в платформы.
Того робота я всё равно доделаю, но пробую и другие варианты. Поэтому я решил, сделать одного из следующих робота более простым в использовании. Он просто будет включаться в розетку и заряжаться. Затем работать. Когда аккумулятор разрядится - будет сообщать об этом. Всё просто до безобразия. Такой робот наиболее будет удобен для показа, так как не потребует нести с собой зарядное устройство.
Не хотелось самостоятельно делать схему для зарядки аккумулятора. Фактически мне нужен UPS, но который выдаёт не 220V, а только 12.
И такие блоки питания есть. Один из них, приобретённый ADD-55A. Это источник питания с функцией заряда и работы от аккумулятора: 55W Dual Output with Battery Charger(USP Function).
Выбран он по следующим причинам:
Он выдаёт +12V и +5V, что весьма удобно для моих задач.
Имеет функцию "Холодный старт". Это значит, что его можно включить, когда есть только питание от аккумулятора.
Выдаёт сигнал, когда пропало питание в сети (220V), а также сигнал, когда аккумулятор разряжен до 82.5%.
В интернете пишут, что купить ADD-55A достаточно проблематично. Мол в магазинах они редки, а интернет магазины не хотят продавать партию в 1 штуку. Считается, что это устройства специализированные и не нужны частному лицу. Или дерут втридорога.
Не скажу, что у меня возникли большие проблемы с приобретением, но повозиться пришлось. В местных магазинах я действительно не нашел это или близкий по характеристикам блока питания. И интернет магазины, где продают такие устройства не ориентированы на частных лиц. Например, я даже не мог зарегистрировать на некоторых сайтах. Там предполагается, что ты или ООО или как минимум индивидуальный предприниматель. В некоторых интернет магазинам устройства были, но действительно явно с большой наценкой.
После поисках я выбрал компанию ЭЛТЕХ. Можете считать, что я их рекомендую и рекламирую. Всё понравилось. Цена относительно низкая: 1 158,29 руб. Пришлось правда оплатить услуги курьера (доставка из Санкт-Петербурга в Тулу). Но привезли очень быстро. Даже не ожидал. В сумме 1555.33 рублей. Неплохо. Я без доставки видел в интернет магазинах цены порядка 1600 рублей.
Вот прямая ссылка на ADD-55A в этом магазине: http://www.eltech.spb.ru/item/add_55a
На сайте можно подробнее познакомить с описанием, плюс есть вот такой datasheet: ADD-55-spec.pdf.
Не вижу смысл повторять характеристики, которые там можно прочитать. Лучше расскажу, что такое разъем CN1 и какой контакт что значит. Кстати, по умолчанию, контакты не выведены и мне пришлось припаять разъем, который показан на этой фотографии:

Итак, после поисков выяснилось:
PIN1 - Battery low under charge voltage 82.5% ±2%
PIN2 - AC fail.
Сигналы имеют TTL-уровни: Normal 0.8V max. Abnormal 5±0.5V
Сигнал о снижении напряжения аккумуляторной батареи (Battery low) снимается между выводами 1 и 3 сигнального разъема CN1. Критическим считается уровень напряжения батареи 82,5% от номинального значения. Если напряжение аккумуляторной батареи находится выше уровня (82,5 ±2)% от номинального, на выводе 1 присутствует сигнал низкого уровня 0,8 В. Если напряжение аккумуляторной батареи оказывается ниже критического уровня, на этом выводе появляется сигнал 5 В.
Сигнал AC fail снимается между выводами 2 и 3 сигнального разъема CN1.
С помощью этих сигналов можно построить более интеллектуальный источник питания и реализовать индикацию и дистанционное управление. Максимальный ток по цепям сигнализации модулей AD-55 и ADD-55 не превышает 1 мА, поэтому их нельзя использовать для управления цепями, требующими больших токов.
Взято отсюда.
Примечание.
Что-то функция "Холодный старт" не работает. Устройство не включается, когда есть только питание от аккумулятора. Возможно я что-то не так понял, или что-то не так делаю. Быть может нужно использовать какую-то перемычку или что-то ещё. Непонятно. Жаль. Печалька.
0 notes
Photo

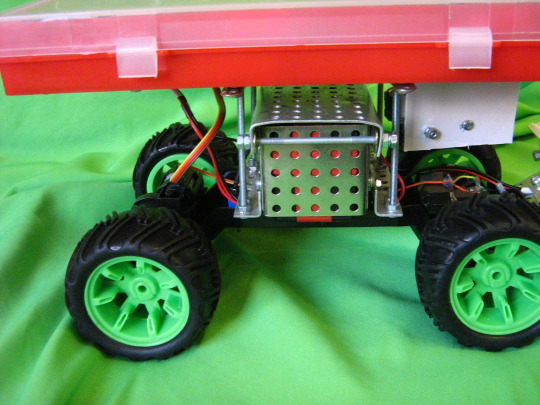
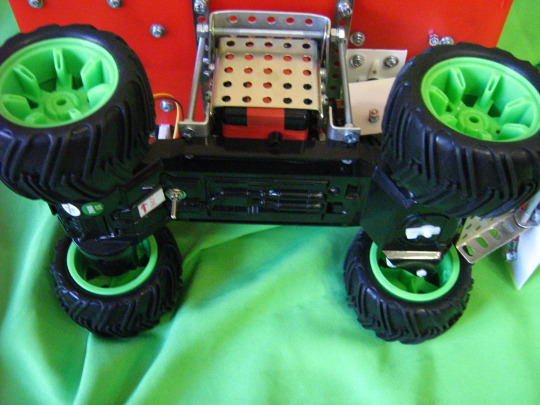
Как делать не надо.
Часто делая что-то, я понимаю, что так делать было неправильно. Надеюсь кто-то ещё, кроме меня, научится на моих ошибках :). Вот как раз одни такой случай.
Пытаюсь сделать робота, который сам находит зарядку, когда аккумулятор разряжается до определённого уровня. Для этого будет использоваться ИК диод и ИК-датчик.
Писать про этого робота, пока он не сделан, я не хочу. Но тут выяснилось, что я неправильно выбрал для него платформу на колёсах. Сейчас я его разберу и возьму другую платформы (скорее всего гусеничную). Но пока я ещё его не разобрал, решил сфотографировать.
Итак,. не берите вот такие платформы от игрушечных машин. У них очень плохо с поворотом. Я взял достаточно тяжёлый аккумулятор GS 1.2-12 (0.55 кг). Это оказалось фатально. Вперёд или назад платформа ездит олень плохо. Можно немного улучшить дело, сняв мягкие шины с пластмассовых колёс. Но что с шинами, что без, она не поворачивает. У моторчика не хватает сил.
Да и вообще устройство поворота весьма неэффективно. Моторчик должен повернуть колёса, разжав пружину и дальше застопориться, поддерживая колёса в повёрнутом положении. Когда напряжение отключается, пружина возвращает колеса в исходное положение (прямо).
Такой принцип поворота плох тем, что застопоренный моторчик потребляет крайне много тока и сильно греется. Меня это не очень волнует. Робот делается для отработки различных схем. Т.е. совсем экспериментальный. И я планировал бороться с перегревом, делая паузы в работе. Быстрая разряд аккумулятора мне тоже не важен. Но оказалось, что вообще ничего не работает.
Имейте в виду, что такие платформы крайне слабенькие.
0 notes
Text
Прошу поделиться сломанной или ненужной техникой с движущимися механизмами
Я увлекаюсь робототехникой. Это моё хобби. Для изготовления роботов требуются различные компоненты и детали. Понятно, что основную начинку (микроконтроллеры, сервоприводы и т.д.) я приобретаю через eBay или в местных магазинах. Но купить всё-всё сложно и затратно. Невозможно предугадать заранее, какая пружинка или иная деталь может понадобиться. А когда понадобится, не ждать же её месяц из Китая. Поэтому я разбираю различную технику с целью поживиться двигателями, шестерёнками и прочими компонентами.
Буду благодарен получить в дар электронную технику, которую можно разобрать и использовать для создания роботов и прочих поделок. Интересует такая техника, в которой есть движущиеся механизмы. Также подойдут старые детские игрушки, такие, как танк на радиоуправлении.
Пример, что не интересно:
Мышки, клавиатуры, материнские платы, флешки и так далее.
Пример, что пригодится:
принтеры;
сканеры;
CD/DVD дисководы;
детские игрушки с моторчиками;
остатки детского железного конструктора.
Напишите, если Вы живёте в Туле, и у вас есть что-то из описанного хлама. Я зайду и заберу или договоримся, где можно встретиться.
Напишите мне на почту: karpov [@] viva64.com или сюда комментарий.
1 note
·
View note
Photo
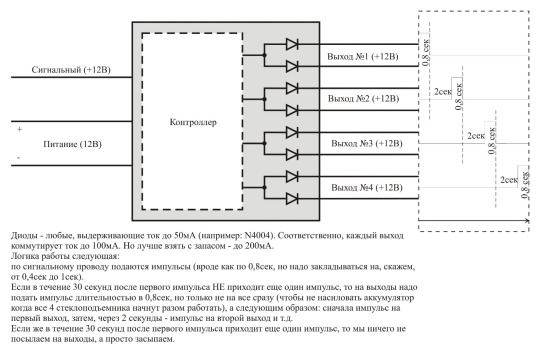
Автоматический подъем стекол в автомобиле.
Статья получилась большой и мне будет сложно разместить её на Tumblr. Предлагаю скачать статью в PDF формате: https://yadi.sk/i/2pQJjHaaZhnod
На картинке показана первоначальная постановка задачи. В статье будут подробности.
#сделай сам#микроконтроллеры#стеклоподъемник#DC-DC преобразователь#ATtiny2313#CodeVisionAVR#трансил#TinyCAD
0 notes
Video
tumblr
И ещё одна проба платформы Robo-Soul TK-100 (см. мою предыдущую заметку).
2 notes
·
View notes
Video
tumblr
Немножко попробовал собранный Robo-Soul TK-100 (см. мою предыдущую заметку).
0 notes
Text
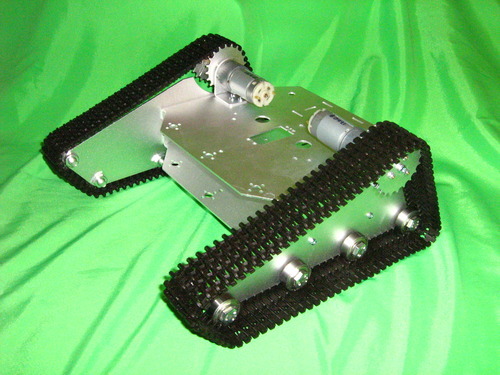
Robo-Soul TK-100
Мне пришёл набор Robo-Soul TK-100. Это платформа на гусеницах для создания роботов. Заказывал в интернет магазине ICStation.com. Сейчас цена на него $145, но я заказывал за $106. То ли скидки были, то ли платформа подорожала.
На фотографиях магазина платформа выглядит вот так:



В целом не обманули. Так он и выглядит:

Но в целом я остался недоволен. Мне кажется, набор за $100 должен нормально собираться, а полученный результат нормально ездить. Это не так. Набор оказался из разряда "доработать напильником".
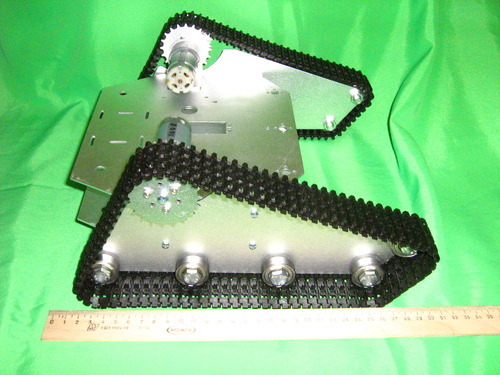
В разборе, всё это выглядит так:

Вроде собрать не проблема, но этим я прозанимался два вечера.
Первое. Гусениц длиннее, чем требуется. Это конечно хорошо, что есть запас. Что-то может сломаться и потребуется заменить фрагмент гусеницы. Более того, в этом сразу появилась необходимость. Два железных стержня, крепящих сегменты внутри одной гусеницы почем-то оказались ржавыми. Соответственно, там не происходил сгиб. Я даже руками не смог согнуть. Как так получилось - не знаю. Но тем не менее явный брак.
Итак, гусеницы надо укоротить, где-то на 1/10 длины. Это оказалось непросто. Я очень долго пытался научиться выдавливать металлические стержни из пластмассовых сегментов. Напишу, к какому способу я в результате пришёл. Может кому пригодится. Я зажал миллиметровое сверло в тисках (тупой частью вверх). И надавливая металлическим стержнем точно на сверло я смог их выдавливать. Нужно приложить достаточно большое усилие, но вполне всё получается. Вставить обратно проще. Просто чем-то нажать посильнее.
Второе. Из рисунков не понятно, как именно следует собирать платформу. Инструкции нет. У меня нет уверенности что я собрал правильно, хотя, как можно сделать по-другому, я не знаю.
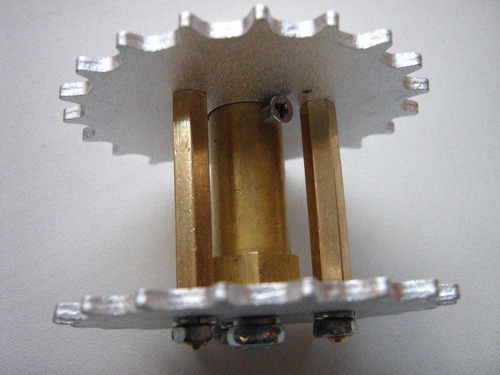
Так вот, сборка явно плохо продумана. Остались лишние детали. Это не беда. Беда в том, что непонятно как прижать блок шестерёнок к валу двигателя. Посмотрите на рисунок:
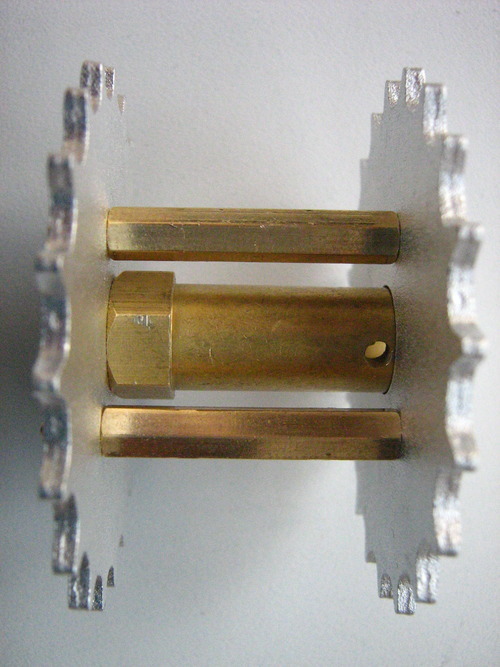
Отверстие для закрепления вала находится возле самой шестерёнки. Воспользоваться винтами из комплекта невозможно. Мешается головка винта. Сделать зазор побольше с помощью добавления шайб тоже нельзя. Я пробовал. Тогда получается плохое сцепление шестерни с гусеницами. Между шестернями должно быть расстояние точно равное длине шестигранных винтов из комплекта (не знаю, как они правильно называются).
Неприятный момент. После долгих поисков нашел у себя пару винтов с маленькой головкой. Ими и воспользовался. Если бы не нашел - не знаю, что делать. Тогда бы пришлось как-то делать винт самому. Можно отпилить головку и сделать прорезь под отвертку.
Вот как я закрепил:

Третье. Неприятная неожиданность ждала меня по окончанию сборки. Одна гусеница постоянно соскакивала. Долго не мог понять причину. Расследование показала, что на одной из шестеренок криво просверлены отверстия под винты.
Когда совпадают отверстия, должны совпадать зубья шестеренок. А у меня в наборе вот такая неточность:

Пришлось просверлить другие дырки в правильных местах. После этого гусеница прекратила соскакивать. Вот доработанная шестерёнка:

Стрелочками показаны неправильные отверстия.
Итого. Как следует платформу не испытывал. Потом опишу как она себя будет вести в составе робота. Но первое впечатление плохое. Конструктор оставляет впечатление, что сделано "тяп-ляп".
#Robo-Soul TK-100#робототехника#роботы#слава роботам#платформа для роботов#платформа на гусеницах#доработать напильником#robotics#robots#робот
1 note
·
View note