#CANKeypad
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
Tumblr has 16.74 million mobile monthly users in the US.
Text
A Complete Guide to Connected Cars
October 30, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit
Introduction

A smart car, also known as a connected car, has cutting-edge technology that allows it to communicate with other cars, the internet, and other equipment. The connected car software that powers this connectivity makes numerous communication and connectivity options possible. Consequently, linked automobiles offer several advantages to drivers, passengers, and automakers while also revolutionizing the driving experience.
How do connected vehicles work?
The smooth integration of hardware, software, and networking technologies is what gives connected automobile technology its power. This is an explanation of how connected cars work:
Onboard Sensors: A variety of sensors included in connected cars collect information on the location, speed, performance, and other aspects of the vehicle. These include cameras, GPS, gyroscopes, and accelerometers that cooperate to give the car’s computer systems real-time data. Driving decisions, such as changing speed or applying brakes, are then made using this data.
Telematics Systems: A central telematics system, which functions as the brain of the connected vehicle, receives the data gathered by onboard sensors. To enable helpful features and services, this system interprets the data and interacts with other systems, including the infotainment system or the driver’s smartphone. For example, it can help with remote diagnostics, provide navigation support, obtain real-time traffic information, and transmit alerts about possible road hazards.
Data Transmission: Cellular networks, Wi-Fi, or Bluetooth are used to send the collected data to a central server or the cloud.
Data processing: To produce insights, suggestions, and real-time warnings, sophisticated algorithms examine the data. The whole driving experience can be improved, maintenance needs can be identified, and driving efficiency can be increased with these insights.
Options for Connectivity: There are multiple ways to connect with connected cars:
Embedded Connectivity: An uninterrupted and flawless internet connection is provided via the car’s integrated internet connection.
Tethered Connectivity: The car uses a smartphone to connect to the internet, which makes it a less expensive but maybe less dependable choice.
Smartphone-based Connectivity: The cheapest solution, but potentially less dependable than the others, is the car’s use of a smartphone as a hotspot to access the internet.
Types of connectivity in connected cars

Different forms of connectivity are necessary for connected cars to exchange data and communicate. Here are a few important kinds:
Vehicle-to-Vehicle (V2V) communication: V2V communication enables direct connections between automobiles, allowing them to exchange data on location, speed, and potential road dangers.
Vehicle-to-Infrastructure (V2I) communication: This type of communication helps to optimize traffic flow and alleviate congestion by allowing vehicles to communicate with toll booths, traffic signals, and other infrastructure.
Vehicle-to-Pedestrian (V2P): By warning both the vehicle and people about possible collisions, V2P communication helps prevent accidents involving cyclists and pedestrians.
Vehicle-to-Cloud (V2C): V2C communication allows automobiles to send data to the cloud for authorized users to analyze, store, and access remotely. V2X, or vehicle-to-everything, refers to all forms of communication between automobiles and their environment, including V2V, V2I, V2P, and V2C.
Benefits of connected cars

Some of the primary advantages that make linked cars so alluring are as follows:
Improved Convenience: Features offered by connected cars make driving easier. While remote access enables owners to lock or unlock their cars, check fuel levels, and even start the engine from a distance, real-time traffic updates in navigation systems help drivers get to their destinations quickly.
Advanced Entertainment: Passengers can stream music, watch movies, or play games on built-in screens in connected cars, which serve as a central location for entertainment. Everyone can stay connected thanks to onboard Wi-Fi hotspots, which enhances the enjoyment of lengthy journeys.
Enhanced Performance: Data about tire pressure, fuel economy, and vehicle performance are gathered and analyzed by connected automobiles. Both drivers and mechanics can access this information, which promotes prompt maintenance and the best possible vehicle performance.
Decreased Environmental Impact: By tracking driving habits and planning routes to cut down on emissions and fuel use, connected automobiles help create a cleaner future. Furthermore, effective traffic management, which reduces congestion and further reduces emissions, is made possible by connection.
How can data from linked cars be used by the automotive industry?

Automotive companies can benefit greatly from connected car data, which provides insights that improve goods, services, and customer interaction.
Product Development: Data from connected cars is essential to the creation of new products. Automakers may gain a better understanding of driver preferences, usage patterns, and behaviors by examining data from linked vehicles. They can develop new features and products that better satisfy consumer wants thanks to this understanding. Automakers, for instance, might prioritize certain features in future models and think about improving or phasing out others by using feature utilization data to identify which features are popular and which are underutilized.
Safety and Security: Improved safety features and fewer accidents are two benefits of connected automobile data. Automakers can find safety hazards and create new solutions to safeguard drivers and passengers by looking at driving habits and behaviors. To increase road safety and, eventually, create a more secure and effective transportation system for all, this data can also be distributed to government agencies and other groups.
Marketing Personalization: A Salesforce study indicates that many drivers are open to exchanging data for customized services. Automakers and dealers can utilize connected car data to tailor marketing messages to individual drivers. By looking into driving patterns, location data, and vehicle health, automakers may create services and promotions that are especially suited to each driver’s needs. For example, a driver who lives in a colder climate would receive winter tire deals, and a driver who commutes a long distance might qualify for maintenance service discounts. Customer happiness and brand loyalty are increased by this personalization.
Service: Automakers can enhance their customers’ service experiences by using connected car data. Automakers may proactively plan service appointments and offer tailored repair recommendations with real-time data on vehicle performance and maintenance requirements, preventing problems and maintaining vehicles in top shape. Automakers can also provide customized services that address each client’s unique demands by learning about their driving behaviors. This builds better customer relationships and boosts consumer satisfaction and loyalty.
All things considered, linked car data has enormous potential for the automotive industry by promoting efficiency and safety, increasing the quality of goods and services, and boosting marketing efficacy. Automakers will have even more opportunities to use this data to their advantage and that of their customers as technology develops and more cars are connected.
Conclusion:
In summary, Connected Car technology is transforming the automotive sector, improving the driving experience, and offering major advantages to automakers, passengers, and drivers. Connected automobiles provide better entertainment, increased convenience, better performance, and less environmental impact thanks to their sophisticated connection capabilities. Connected automobiles may easily integrate data that supports safer and more efficient driving decisions by utilizing onboard sensors, telematics systems, and a variety of connectivity options.
Automotive firms can benefit greatly from the data created by Connected Cars, which provides deep insights for tailored marketing, improved safety features, and product development. By better understanding consumer preferences, automakers can tailor their products and services to meet the needs of drivers. Stronger client satisfaction and loyalty are also fostered by the ability to personalize marketing and service encounters. The potential for linked car data will only increase as technology develops further, opening the door to a future in which automobiles are safer, more effective, and more customized.
Dorleco specializes in offering a variety of Connected Cars solutions, such as EV software services, CAN keypads, CAN displays, and vehicle control units (VCUs). We are dedicated to providing innovative, high-quality solutions to meet the changing demands of the automotive sector. We would be happy to get in touch and talk about how we might meet your needs. Feel free to contact us; our staff is available to help.
1 note
·
View note
Text
Unlock Precision Control with Grayhill CAN Keypad Solutions!

Experience seamless machine interaction with Grayhill's CAN Keypad. Designed for precision, our keypads are your go-to for intuitive control. Whether you're in automotive, medical, or industrial automation, trust Grayhill to bring technology to life with a human touch. #CANKeypad #Grayhill
0 notes
Text
EV Powertrain Software Development
October 23, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit
Introduction

EV Powertrain Software Development for electric vehicles (EVs) is a complex process requiring careful preparation, ongoing testing, and quick iteration. Powertrain systems have several interconnected parts that must function flawlessly, such as control units, inverters, battery management systems, and electric motors. Ensuring that the control software connects with these components flawlessly while preserving efficiency, safety, and performance presents a problem.
Identifying bugs later might result in substantial cost increases, delays, and costly troubleshooting. To address these issues, a Model-Based Design (MBD) strategy in conjunction with cutting-edge technologies from top players in the market, such as Dorleco, can be extremely helpful in reducing time-to-market, maximizing resource utilization, and producing reliable, high-quality solutions.
The EV Powertrain Control Software Development Stages
It’s critical to comprehend the essential phases of EV powertrain software development before delving into the details of the MBD approach and how Dorleco tools support development.
1. Requirement gathering and analysis:
Development teams examine the functional and performance needs of the electric vehicle powertrain system at the outset of the process. At this point, it’s important to comprehend how the various parts of the powertrain will work together as well as how the control software will operate the entire system to meet objectives like performance, safety, efficiency, and range optimization.
2. Control Design and Architecture:
Creating the control system architecture comes next after defining the requirements. This involves defining the control logic and creating algorithms that can manage the intricacies of the powertrain, such as coordinating motor control and controlling energy flows. At this point, interactions with further parts, such as the battery and transmission systems, are also specified.
3. Model-Based Design:
Model-Based Design (MBD) is used in this situation. The powertrain system’s physical components are represented mathematically by MBD, which also simulates their interactions in a controlled setting. By taking this step, it is certain that design problems can be found and fixed early on, which lowers the expense of repairing them later.
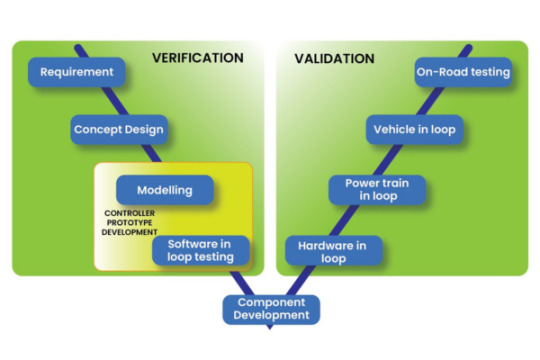
4. Testing and Validation:
Model-in-the-loop (MIL) testing is the first step in the testing process. It involves simulating and testing the control logic inside a virtual model of the system. Once confirmed, the control logic is tested in a more thorough simulation that closely resembles the actual system during the Software-in-the-Loop (SIL) phase. During the last phase, known as Hardware-in-the-Loop (HIL) testing, the control logic is implemented on hardware in real-time, and the software’s ability to communicate with physical components is tested.
5. Hardware Prototyping and Deployment:
After the simulation has been used to verify the control software, real hardware is used for testing. After verifying proper input/output responses through open-loop operation, the controller is placed through a battery of tests to verify its real-world performance.
6. Testing Hardware-in-the-Loop (HIL):
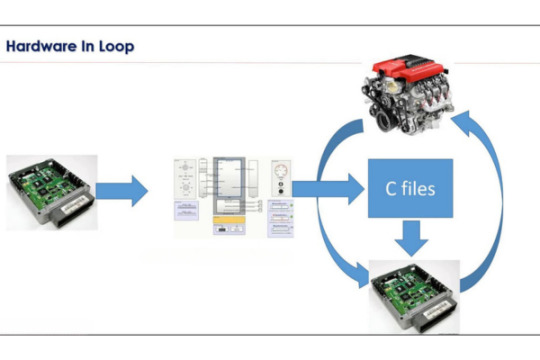
During this phase, engineers can test the controller without requiring the physical components to be present because HIL testing simulates the full plant (motor, inverter, battery system, etc.) in real time. Rapid testing under a variety of conditions is made possible by the HIL test bench, which functions as an effective virtual vehicle.
Model-Based Design (MBD) and Its Benefits
1. EV Powertrain Software Development has been transformed by Model-Based Design (MBD), which helps teams reduce the risks associated with late-stage testing and debugging. MBD provides several advantages:
2. Continuous Testing: When using MBD, testing starts at the design phase and doesn’t stop until the project is finished. This reduces the amount of time needed for debugging and rework since errors and inconsistencies are found early.
3. Enhanced Collaboration: Development teams can work on various system models concurrently, allowing them to exchange updates and share progress in real-time. This lessens the possibility of integration problems, which generally occur when control software components are combined.
4. Efficient Development: Without the requirement for real prototypes, developers may simulate and test control software under a variety of scenarios by using models. This makes it possible to evaluate edge cases early and optimize system performance before the hardware is released.
To handle the increasing complexity of EV Powertrain Software Development, where controllers must be closely connected with both mechanical and electrical systems, MBD’s continuous integration and testing environment is essential.
Advanced Tools for EV Powertrain Software Development
Advanced tools like Infineon, Vector, and Typhoon HIL can assist in further optimizing the development process. These technologies offer great fidelity and precision in the development of control software, and they facilitate hardware prototyping, testing, and validation.
1. AURIX™ TC3xx Automotive MCUs
The AURIX™ TC3xx microcontrollers (MCUs) from Infineon are made to withstand the severe demands of contemporary EV powertrain systems. The 32-bit TriCore™ processing architecture, upon which these MCUs are based, provides real-time performance, functional safety, and power efficiency. Numerous EV applications, such as motor control, battery management, and inverter management, are supported by the AURIX™ TC3xx series.
AURIX™ TC3xx MCUs are equipped with hardware security and safety measures that guarantee reliable and secure operation of the control software, even in demanding settings. The MCUs meet the strictest safety standards (ASIL-D) required for use in automotive applications.
2. The VX1000 System from Vector for ECU Calibration
The VX1000 system from Vector offers engineers a high-performance ECU measurement and calibration solution. The VX1000 facilitates quick and accurate data collection by connecting the ECU to measurement and calibration instruments. This enables engineers to guarantee that the software satisfies performance requirements and optimizes control algorithms.
Through a smooth integration with test benches and labs, the VX1000 system enables developers to measure ECUs in real-time driving scenarios. Additionally, it facilitates high transfer rates for quick data processing, which boosts testing and calibration process effectiveness.
3. Highest Fidelity Ultra-HIL Testing
Thanks to its robust simulation capabilities, an extremely realistic hardware-in-the-loop (HIL) testing platform allows developers to test control software before building physical prototypes. Typhoon HIL allows for comprehensive testing under a variety of scenarios by simulating the behavior of real powertrain components (such as motors, inverters, and battery systems) in real-time.
With the help of HIL’s platform, developers can create digital twins, or virtual versions of actual powertrain systems, which let them mimic how the systems would behave in various operating scenarios. Additionally, the platform facilitates automated testing, which enables developers to run intricate test scenarios, repeat test cycles, and guarantee that every control software release satisfies reliability requirements.
4. NXP S32K3XX Microcontrollers

Dorleco uses this microcontroller in their VCUs. It covers the primary characteristics of the S32K344 White Board, which may be used to assess various applications, including T-boxes, Domain Controllers, BCM, and Gateways. Along with a thorough description of connectors and interfaces, jumper configurations, and precise MCU pin assignments on the board, it also describes the White Board’s power supply architecture.
Conclusion
Creating EV powertrain control software is difficult and complex, requiring sophisticated tools, thorough testing, and careful planning. Developers may guarantee continuous testing, early error detection, and enhanced teamwork by implementing Model-Based Design (MBD). Better software, shorter development cycles, and lower costs are the outcomes of this.
The EV Powertrain Software Development process is further streamlined by sophisticated tools from leading companies in the field, such as Vector and Dorleco HIL, which provide reliable solutions for hardware prototyping, testing, and validation. By accelerating test cycles and guaranteeing that the control software satisfies the highest criteria of performance, safety, and dependability, these solutions assist lessen the need for physical prototypes.
0 notes
Text
CAN keypad security and encryption
August 5, 2024
by dorleco
with no comment
Autonomous Vehicle Technology
Edit
Introduction

Keypads for the Controller Area Network, or CAN, are extensively used in a variety of applications, including home automation, automotive systems, and industry. To accept user input and communicate with the underlying control systems, these keypads are necessary. Ensuring the confidentiality and integrity of data sent between the keypad and control systems is crucial to prevent unauthorized access and manipulation. We will discuss some crucial points to remember in this introduction, as well as the importance of CAN keypad security and encryption.
1. Understanding CAN Keypads:

2. Security Difficulties:
CAN keypad security and encryption be crucial due to several security vulnerabilities?
Eavesdropping: An attacker may employ eavesdropping to intercept and observe data communication on CAN buses.
Replay Attacks: An attacker may be able to get unauthorized access by capturing and playing back messages.
Data integrity: Ensuring that the data transmitted between the keypad and the control system is unaltered is vital.
Authentication: Verifying the identity of the control system and keypad is crucial to preventing unauthorized access.
3. Encryption of CAN Keypads:
An essential instrument for enhancing the security and encryption of the CAN keypad. Think about the following ideas related to encryption.
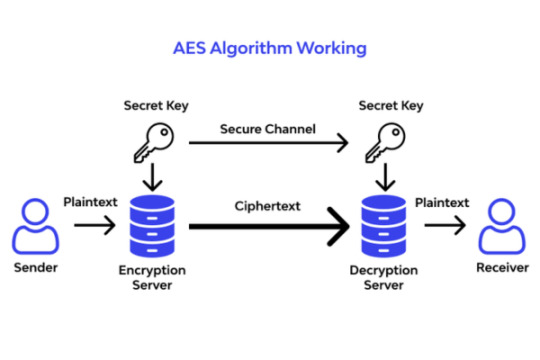
Secure Communication: Use encryption technologies like AES (Advanced Encryption Standard) to safeguard data exchanged between the keypad and the control system.
Key management: Implement suitable key management procedures to stop encryption keys from being misplaced or used improperly.
Authentication and Access Control: To prevent unauthorized access, configure authentication features on the keypad and control system. This can need using secure protocols like TLS/SSL or PKI (Public Key Infrastructure) for authentication and access control.
4. Firmware updates and secure boot:
Verify that the keypad has a secure boot process and that firmware updates are signed and certified to prevent device manipulation.
Physical Security: Consider the physical security of the keypad. Physically tampering with the device should be difficult, and any attempt should cause lockout or alarm systems to activate.
5. Watching and Identifying Intruders:
Install intrusion detection and monitoring systems to alert administrators to any dubious activity or security breaches immediately.
6. Adherence to Regulations:
Take into consideration industry-specific laws, regulations, and guidelines, such as NIST guidelines or ISO 26262 for automotive systems, to ensure adherence to CAN keypad security best practices.
CAN Keypad Security and Encryption Benefits
The overall security and dependability of systems using CAN (Controller Area Network) keypads can be improved by utilizing CAN keypad security and encryption, which offer numerous important advantages. The following are some of the main benefits:
Data Confidentiality: Encryption ensures the privacy of data transferred between the CAN keypad and the control system. Passwords, PINs, and orders are examples of sensitive data that are protected from unwanted access and malicious behavior.
Data integrity is the process of preventing data alteration while it is being transmitted by using security and encryption techniques. This ensures that the control system receives precisely the data supplied from the keypad and prevents any manipulation or interference.
Authentication: To stop unwanted access, it is essential to confirm the identity of the keypad and control system.
Tamper Resistance: Physical CAN keypad security and encryption measures and tamper detection technologies make it impossible for attackers to physically tamper with the keypad. Any effort at tampering may cause lockout processes or alarms.
Monitoring and Intrusion Detection: Real-time monitoring and intrusion detection systems help in promptly discovering and responding to security issues, preventing potential security breaches from inflicting significant harm.
User Confidence: Security and encryption techniques provide users with peace of mind by ensuring that their data and interactions with the CAN keypad are secure. More trust in the system could arise from this.
Protection from Eavesdropping: Encryption shields data from listening in on users’ conversations by stopping hackers from intercepting and following data flow. Even if an attacker gains access to the data, they will not be able to decrypt the encrypted content without the decryption key.
Replay attack mitigation involves the use of encryption and security measures to prevent attackers from recording and replaying previous messages in an attempt to gain unauthorized access. When secure communication protocols and encryption keys are employed, it becomes more difficult for attackers to use stolen data.
Secure Communication: TLS and SSL protocols allow data to be transferred safely across an encrypted communication channel between the control system and keypad. This ensures the security of data during transit.
Advantages of Encryption and CAN Keypad Security
While there are numerous benefits to CAN (Controller Area Network) keypad security and encryption, it’s important to consider certain potential downsides and challenges as well:
Complex Implementation: It can be challenging and resource-intensive to deploy strong security and encryption systems. It may require additional hardware, software, and expertise, which could increase the development and operating costs.
Performance Overhead: Security protocols and encryption may result in performance overhead, which may slow down data transfer and reaction times. For applications that depend on latency or real-time, this could be a major issue.
Compatibility Issues: It can be challenging to guarantee that security protocols and encryption work with a range of hardware and software components, devices, and systems.
Complexity of Key Management: It can be challenging to oversee the production, distribution, rotation, and storage of encryption keys. Security vulnerabilities can arise from improper key handling.
Usability Challenges: Including security features can make user interfaces more complex, which raises the possibility of errors or confusion on the part of the user when utilizing the CAN keypad.
Communication Overhead: In a CAN network with limited capacity, the overhead from security measures can reduce available bandwidth and impact the efficiency of data transmission.
Possible Compatibility Issues: Including security and encryption features may not work well with older systems that aren’t compatible with them.
Training and Awareness: To make sure that administrators and users are aware of security best practices and how to use encrypted CAN keypads, more training and awareness campaigns could be required.
Conclusion:
In summary, CAN (Controller Area Network) keypad security and encryption keypads are essential components of a comprehensive security strategy that ensures the confidentiality, integrity, and validity of data and communications in a variety of applications, such as industrial, home automation, and automotive systems. The obstacles and drawbacks associated with implementing these procedures are greatly outweighed by the protection and advantages they provide.
By protecting critical data from replay, modification, and eavesdropping threats, encryption strengthens the system’s overall security posture. Secure boot procedures protect firmware integrity, access control stops unwanted contact, and secure authentication methods confirm the authenticity of devices. Users feel more confident as a result of these precautions, which also lessen the financial and legal consequences of security breaches.
CAN keypad security and encryption must, however, be approached carefully. This entails maintaining appropriate key management, doing routine maintenance, and keeping up with changing security requirements and threats. It is important to weigh the need for strong security against the possibility of increased complexity, resource overhead, and compatibility problems.
In the end, adding security and encryption to CAN keypads not only safeguards private information but also makes the systems in which they are used more reliable and resilient. Maintaining a strong commitment to security will be essential to protecting sensitive information and guaranteeing the integrity of these key interfaces as technology advances.
0 notes
Text
CAN Keypad Interface
November 2, 2023
by dorleco
with no comment
eMOBILITY CONTROLS

Introduction
In many automotive and industrial applications, the Controller Area Network (CAN) keypad interface is essential because it makes it possible to integrate keypad input systems with CAN-based communication networks. An overview of the importance uses, and advantages of CAN keypad interfaces is given in this introduction.
1. The CAN Keypad Interface’s Significance:

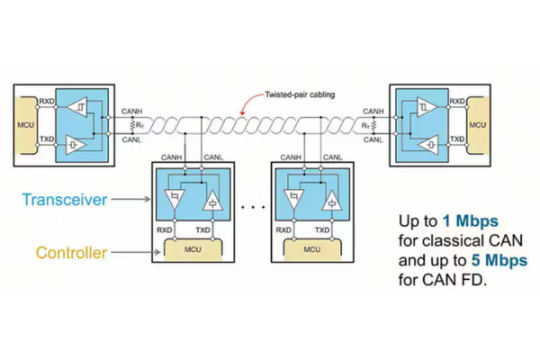
The CAN keypad interface is important because it acts as a link between CAN-based communication networks and conventional user input devices like keypads. CAN is a strong and reliable communication system that is widely used in industrial automation and automobiles. Keypads and CAN networks must be integrated for several reasons.
Seamless Connectivity: By offering a single communication platform, CAN keypad interfaces make it simple to include user input devices into intricate control systems.
Real-time Data Exchange: Because CAN networks provide real-time data transfer, they are the best choice for applications requiring fast reaction times.
Enhanced Control: CAN allows for the effective control and monitoring of these systems, and keypads make it easier for users to interact with a variety of systems, from industrial machinery to car entertainment.
2. Applications of CAN Keypad Interface:
There are numerous industries in which the CAN keypad interface is used, such as:
Automotive: Multimedia control, climate control, navigation systems, and security features in cars are all operated by CAN keypad interfaces. It is convenient for both drivers and passengers to interact with the vehicle’s operations.
Industrial Automation: Data input, operator panels, machine control, and automated manufacturing and process control systems all use CAN keypad interfaces in industrial settings.
Medical Equipment: CAN keypads are frequently incorporated into medical devices and equipment to facilitate user input, allowing healthcare practitioners to effectively manage and monitor equipment.
Home automation: CAN keypad interfaces are utilized in smart homes to manage security systems, HVAC units, lights, and other smart equipment, giving homeowners an intuitive interface.
Aerospace: To ensure dependable operation and safety in demanding settings, aircraft and spacecraft systems use CAN keypad interfaces for pilot input and control.
Benefits of CAN Keypad Interface:

Numerous advantages of the CAN keypad interface make it an invaluable tool for a wide range of applications, including industrial, medical, automotive, and more. The following are the main benefits of utilizing a CAN keypad interface:
Real-time Responsiveness: The real-time communication capabilities of the Controller Area Network, or CAN, are well-known. It guarantees prompt processing and response to user inputs when combined with a keypad. This is crucial for applications like automotive controls, industrial automation, and medical equipment where quick feedback or control is needed.
Robust and Reliable: Even in challenging and cacophonous settings, CAN networks are made to be strong and dependable. The CAN keypad interface is appropriate for usage in industrial environments or automotive applications where electrical noise is common because it can tolerate electromagnetic interference.
Scalability: Additional keypads or input devices can be added as needed thanks to the CAN keypad interfaces’ easy scalability. Applications that might grow or need more user input over time will benefit from this scalability since it allows for minor adjustments.
Standardization: Because CAN is a well-known and extensively used communication protocol, parts, and systems made by many manufacturers can frequently function together flawlessly. By guaranteeing compatibility and interoperability, this standardization eases integration difficulties and streamlines system development.
Simplified User Interaction: Operators, drivers, or users can engage with complicated systems more easily thanks to the CAN keypad interface’s user-friendly input technique. Keypads ease user experience and lower the learning curve because they are familiar and intuitive.
Enhanced Control: Effective control and monitoring of multiple systems is made possible by the CAN keypad interface. The keypad interface allows users to efficiently handle and command many systems, including medical equipment, industrial gear, and automobile settings.
Safety and Security: By enabling prompt and accurate user control, CAN keypads can improve safety and security in situations where human safety is of the utmost importance, such as in cars or industrial machinery. Keypad designs can reduce human mistakes and distractions, enhancing overall security.
Versatility: CAN keypad interfaces are adaptable and can be tailored to meet the needs of certain applications. The keypads can be developed with diverse layouts, sizes, and capabilities to fit the needs of different systems and user preferences.
CAN Keypad Interface Challenges
The CAN keypad interface has many advantages, but several issues and concerns need to be taken into account when putting it into practice. The following are some of the main difficulties with CAN keypad interfaces:
Complex Integration: It might take a lot of effort and time to integrate a mighty keypad interface into a system. It frequently calls for familiarity with keypad hardware and software, CAN communication protocols, and the ability to properly configure and program the interface.
Personalization and User Experience: It can be difficult to design the user interface and alter the keypad layout to satisfy certain application needs. It may take a lot of design and testing work to create an intuitive and user-friendly experience that reduces user errors.
Electromagnetic Interference (EMI): CAN keypads may experience problems when used in high-electricity or high-EMI situations. Further shielding or filtering may be necessary to mitigate the communication mistakes and data transfer disruptions caused by electromagnetic interference (EMI).

Security Issues: Security is an issue in situations where CAN keypads are utilized for vital tasks, including industrial automation or vehicle control. Strong security measures are required since tampering with the keypad interface or gaining unauthorized access could have catastrophic repercussions.
Scalability Issues: Although CAN networks are scalable, system design and administration issues may arise when more keypads and input devices are added. One aspect is making sure the extra devices don’t interfere with the network’s functionality or use more bandwidth than is allowed.
Diagnostics and Maintenance: It can be difficult to keep an eye on and maintain the CAN keypad interface and its related parts. In the case that something fails or malfunctions, diagnosing and fixing the problem could call for certain equipment and knowledge.
Programming and Configuration: It can be difficult to integrate the CAN keypad interface with the rest of the system and configure it to function as intended. This frequently entails programming and configuring the appropriate parameters, which could call for specialized knowledge and abilities.
Standards and Compatibility: Although CAN is renowned for its standards, it can still be difficult to guarantee compatibility across different parts and gadgets made by different companies. Compatibility problems may arise due to variations in protocol versions, transmission speeds, and data interpretation.
Conclusion:
In conclusion, the Controller Area Network (CAN) keypad interface is a valuable tool that bridges the gap between user input and CAN-based communication networks in a variety of applications, including automotive, industrial, medical, and more. While it offers numerous advantages, such as real-time responsiveness, robustness, scalability, and enhanced user control, it also presents specific challenges that must be addressed for successful implementation.
The complexity of integration, customization, and the need for user training are challenges that system designers and engineers must navigate. Additionally, ensuring security, mitigating electromagnetic interference, and managing the lifecycle of the interface are crucial considerations in its implementation.
Despite these challenges, the CAN keypad interface plays a pivotal role in improving user interaction, control, and overall system efficiency. It offers a means to streamline user input, ensuring that operators, drivers, or users can efficiently manage complex systems. As technology continues to advance, addressing these challenges and optimizing the use of CAN keypad interfaces will be essential in shaping the user experience and functionality of a wide range of applications, enhancing safety, reliability, and user satisfaction. When implemented with care and expertise, CAN keypad interfaces contribute to the success of applications where real-time communication and user-friendly control are of paramount importance.
#ControllerAreaNetwork#keypadinterfaces#CANkeypad#CANkeypadinterface#communicationsystem#CANnetworks#Dorleco#EZpresskeypad
1 note
·
View note
Text
Internal Combustion Engine
Introduction

Internal combustion engine (ICEs), which power around 250 million roadway cars in the US alone, have been the foundation of industrial and transportation uses for more than a century. They are a powerful force in the automotive industry because of their durability, driveability, and compatibility with a wide range of fuels, including ethanol, natural gas, propane, diesel, gasoline, and biodiesel. Additionally, they can be included in plug-in hybrid and hybrid systems to improve range and fuel economy. Internal combustion engines are under increased scrutiny because of environmental concerns and the growing demand for greener alternatives, despite their extensive use and benefits.
Internal Combustion Engine Classification

Continuous combustion engines and intermittent combustion engines are the two main types of internal combustion engines that are distinguished by their combustion mechanisms.
1. Engines with Continuous Combustion
Fuel and oxidizer are continuously injected into these engines, maintaining a constant flame. Two of the best examples of continuous-combustion engines that are frequently used in industrial and aerospace settings are gas turbines and jet engines.
2. Engines with intermittent combustion
Conversely, the air-fuel combination is ignited in cycles by intermittent-combustion engines, commonly referred to as reciprocating engines. This group includes diesel and gasoline piston engines, which produce power by burning fuel in precise order.
The Internal Combustion Engine’s Operating Principles
The basic chemical process of combustion, in which fuel and oxygen combine to create energy, is at the heart of internal combustion engines. ICEs use direct fuel combustion to produce energy inside, as opposed to external combustion engines like steam engines.
An ICE is made up of a moving piston and a stationary cylinder. The crankshaft is turned by the piston’s movement, which is pushed by expanding combustion gases. The powertrain then uses this mechanical energy to drive the wheels of the vehicle.
Currently, there are two main categories of ICEs in production:
Spark-Ignition Gasoline Engines: These engines use a spark plug to ignite a mixture of gasoline and air before compression.
Diesel engines that use compression ignition only compress air before injecting high-pressure fuel, which ignites on its own because of the heat generated during compression.
The four-stroke cycle used by the majority of ICEs consists of four crucial stages:
The Cycle with Four Strikes
Stroke of Intake: The piston is close to the top dead center (TDC) at the start of the intake stroke. The piston descends as the intake valve opens, bringing in fuel and air (or just air in diesel engines). For the combustion chamber to receive a new charge, this stroke is necessary.


An engine cycle needs two full crankshaft revolutions (720°), and only one power stroke produces torque; the other strokes use energy.
Internal Combustion Engine Components
Important elements of an ICE consist of:
Cylinder Head: The camshaft, valves, valve buckets, return springs, spark plugs for gasoline engines, and fuel injectors for direct injection engines are all housed in the cylinder head. Additionally, it has engine coolant tubes.
Engine Block: The crankshaft, connecting rods, pistons, and cylinders make up the engine block. To regulate temperature, it also makes coolant flow easier.
Combustion Chamber: The combustion chamber is the area between the piston, cylinder head, and engine block where air-fuel combustion takes place.
Internal Combustion Engine Benefits

Compact Size: Internal combustion engines (ICEs) are substantially smaller than external combustion engines.
High Power-to-Weight Ratio: They are appropriate for transport applications due to their high power-to-weight ratio.
Portability: the ability to fit a variety of vehicles and allow for easier carrying.
Fast Start Time: Internal combustion engines (ICEs) may start nearly instantly, in contrast to steam engines.
More Efficiency: Compared to external combustion engines, it offers higher efficiency.
Reduced Maintenance: Needs comparatively less care.
Lower Lubricant Consumption: Lubrication is more effective than in external combustion engines.
Moderate Operating Temperature: In contrast to steam engines, internal combustion engines’ maximum temperatures only last a brief period.
Internal Combustion Engine Drawbacks
ICEs have significant disadvantages despite their benefits:
Limited Fuel Options: Rely on premium gaseous or liquid fuels.
High Fuel Costs: When compared to alternative energy sources, gasoline and diesel are more costly.
Environmental Issues: Compared to external combustion engines, internal combustion engines emit more pollutants.
Noise pollution: reciprocal engines produce a lot of noise during burning.
Power Restrictions: Not recommended for applications requiring a lot of power.
Internal Combustion Engine Applications
Many industries make extensive use of ICEs.
Gasoline Engines: Automobiles, boats, and airplanes all use gasoline engines.
Industries use gas engines to generate electricity.
Diesel engines power large machinery, trucks, ships, and railroads.
Industrial, maritime, and aviation settings employ gas turbines.
Internal Combustion Engines’ Future
Cleaner alternatives are becoming more and more necessary as environmental concerns and resource depletion become more urgent issues. Even with notable improvements in ICE efficiency and emissions management, their dependence on fossil fuels continues to be a major drawback.
To overcome these obstacles, research and development initiatives concentrate on:
Alternative Fuels: Sustainable substitutes include hydrogen, biofuels, and synthetic fuels.
Electrification: hybrid and plug-in hybrid technologies integrate electric motors to lower pollution and fuel consumption.
Advanced Engine Management Systems: Control systems powered by AI increase productivity.
Lightweight Materials: Better materials contribute to a lighter engine, which improves fuel economy.
Aerodynamic Enhancements: Improving a car’s aerodynamics helps it use less fuel.
Conclusion
Internal combustion engines have greatly aided modern industries and transportation. They are essential because of their success, reliability, and adaptability. However, ICEs need to change to be relevant as the world moves toward greener energy alternatives.
As ICE technology advances, attention is turning to more environmentally conscious options. Electric powertrains, hybridization, and advanced fuels are shaping the future of transportation. The long-term sustainability of internal combustion engines will depend on how well we balance environmental responsibility and energy efficiency. The secret to guaranteeing a sustainable and effective future in industry and mobility is to embrace innovation.
#Internalcombustionengine#AutonomousVehicle#sensors#Actuators#Dorleco#CANKeypads#CANDisplays#VCUs#Vehiclecontrolunit#EVSoftwareServices#E/Earchitectures
0 notes
Text
Regenerative Braking Systems and Control Strategies
Introduction

Regenerative braking systems are becoming more and more common in contemporary transportation systems, such as trains, industrial equipment, and electric and hybrid cars. During braking or deceleration, this novel braking technique enables the recovery and conversion of kinetic energy into electrical energy. By doing this, regenerative braking lessens the need for traditional friction braking systems, which release kinetic energy as heat, while also greatly increasing energy efficiency.
The basic ideas of regenerative braking, its essential elements, different control schemes, and its advantages and disadvantages will all be covered in this blog. We will also emphasize how developments in this technology are pushing the limits of efficient and ecological transportation.
Regenerative Braking System Fundamentals

Energy conservation is the fundamental idea underlying regenerative braking. Conventional braking systems release heat energy into the atmosphere after converting a vehicle’s kinetic energy. Regenerative braking, on the other hand, absorbs this kinetic energy and transforms it into electrical energy. Energy waste can be minimized and efficiency increased by using the recovered energy to power the electric motor right away or storing it in batteries.
Key Components of a Regenerative Braking System
Several crucial parts make up a standard regenerative braking system:
Electric Generator/Motor: This multifunctional part transforms kinetic energy into electrical energy while braking and acts as a motor when accelerating to provide propulsion.
Energy Storage System: Depending on the use, the recovered electrical energy is kept in capacitors or batteries. The total efficiency of the vehicle can be increased by reusing this stored energy.
Control System: The control unit is in charge of controlling the energy transfer between the traction system, energy storage system, and motor/generator. It decides how much energy can be efficiently recovered and when to use regenerative braking.
Techniques for Regenerative Braking System Control
Several control mechanisms are used to optimize regenerative braking’s efficacy and efficiency. These methods maximize energy recovery while guaranteeing smooth braking performance. Below, we list some of the most popular control techniques:
Torque Blending: This tactic guarantees a seamless changeover between regenerative and friction braking. To maximize energy recovery and minimize wear on traditional brakes, the system determines the required braking force and divides it between regenerative and friction brakes.
Regeneration Prioritization: The control system prioritizes regenerative braking over friction braking when it does not completely charge the battery. The amount of battery charge and the necessary deceleration force are two examples of the variables that influence the choice between the two braking techniques.
Regenerative Braking Modes: There are various regenerative braking modes available in many electric and hybrid cars, including “high” and “low.” While the low mode simulates traditional coasting and offers a more natural driving experience, the high mode offers sharper deceleration and increased energy recovery.
Predictive Control: To maximize regenerative braking, advanced control systems use prediction algorithms based on road gradients, traffic circumstances, and driver behavior. For example, when drivers approach a stoplight, they can reduce regenerative braking, and when they approach a downhill slope, they can increase it.

Benefits of Regenerative Braking Systems
The following benefits of regenerative braking systems enhance the effectiveness, performance, and sustainability of contemporary transportation:
Increased Energy Efficiency: Regenerative braking increases overall vehicle efficiency, especially in stop-and-go traffic situations, by transforming kinetic energy into reusable electrical energy.
Increased Driving Range of Electric Vehicles (EVs): Regenerative braking in electric and hybrid cars helps increase driving range by lowering energy loss, which eventually lessens the need for frequent recharging.
Decreased Operating Costs: Regenerative braking lessens brake wear and tear by reducing the need for conventional friction brakes, which lowers maintenance and repair expenses throughout the vehicle’s life.
Improved Braking Control: Particularly in slick situations, regenerative braking systems offer more control over braking force, which lowers the chance of sliding and increases overall vehicle stability.
Environmental Benefits: Regenerative braking systems help to reduce greenhouse gas emissions and a smaller carbon footprint by minimizing energy waste and dependency on fossil fuel-based energy sources.

Predictive and Adaptive Control: Regenerative braking can adjust to different road conditions and driving styles thanks to clever control algorithms, which enhance energy recovery and overall vehicle performance.
Sustainability and Energy Recovery: Regenerative braking is an essential technology for upcoming industrial and transportation applications since it can recover and reuse energy, which is in line with global sustainability goals.
Limitations and Difficulties with Regenerative Braking Systems
Regenerative braking systems have certain drawbacks and restrictions despite their many benefits:
High Initial Cost: Some individuals and organizations find regenerative braking technology prohibitively expensive to use due to the substantial investment needed in electric motors, control electronics, and energy storage devices.
Complexity: Regenerative braking introduces complexity to an automobile’s current systems, necessitating advanced hardware and software to efficiently control energy flow.
Weight and Space Restrictions: Adding batteries or capacitors raises a vehicle’s weight and space needs, which may affect its performance and design adaptability.
Limited Energy Recovery in Some Situations: Road conditions and driving habits affect how well regenerative braking works. Compared to stop-and-go urban driving, vehicles on highways or at consistent speeds may have less energy recovery.
Standardization and compatibility issues: When transferring between car brands or models, there may be compatibility issues because different automakers use different regenerative braking technologies.
Noise Concerns: Although this is usually a small problem, some drivers may find the sound made by regenerative braking systems strange or disturbing.
Restricted Performance at High Speeds: Regenerative braking works best at modest braking and lower speeds. During high-speed deceleration or emergency braking, it might not offer a substantial energy recovery.
Conclusion :
In terms of industrial machinery and transportation, regenerative braking systems and the control schemes that go along with them are revolutionary.
Significant advantages of these systems include increased EV range, lower maintenance costs, better braking control, decreased environmental impact, and increased energy economy. Regenerative braking is essential to contemporary mobility solutions since it supports energy conservation and sustainability activities.
Researchers and developers must resolve issues such as energy recovery efficiency constraints, system complexity, and high implementation costs. Continued research and development will address these challenges as technology develops, increasing the efficiency and accessibility of regenerative braking.
In the future, widespread adoption will depend on manufacturer standards and compatibility. Regenerative braking will become more and more important in improving the efficiency and sustainability of industrial and transportation applications as it continues to advance.
Modern VCUs, CAN Displays, CAN Keypads, and EV Software Services are our areas of expertise at Dorleco, where we assist companies in putting effective regenerative braking systems and energy management systems into place.
Our cutting-edge products improve contemporary electric vehicles and industrial applications’ performance, economy, and sustainability.
To find out more about how our solutions may improve your transportation systems, get in touch with us at [email protected] right now!
#RegenerativeBraking#AutonomousVehicle#sensors#Actuators#Dorleco#CANKeypads#CANDisplays#VCUs#Vehiclecontrolunit#EVSoftwareServices#E/Earchitectures
0 notes
Text
ADAS Sensor Fusion And Data Integration
Introduction

The automobile sector is changing quickly, moving toward intelligent and driverless cars that improve efficiency, safety, and driving comfort. A key element of this change has been the emergence of ADAS Sensor Fusion and Data Integration, which use a variety of sensors, cameras, radars, and complex algorithms to help drivers drive safely.
ADAS Sensor Fusion and Data Integration — the process of combining information from several sensors to produce a more precise and thorough view of the vehicle’s environment — are essential components of ADAS technology. The significance, difficulties, advantages, and prospects of ADAS Sensor Fusion and Data Integration for the future of mobility are all covered in detail in this blog.
Understanding ADAS Sensor Fusion And Data Integration

Vehicles have evolved over the last few decades from traditional mechanical devices to sophisticated software-driven systems with cutting-edge technological characteristics. A vast array of convenience and safety features are included in ADAS, such as:
Adaptive Cruise Control (ACC): The car’s speed is automatically adjusted using adaptive cruise control (ACC) to keep a safe following distance.
Lane-Keeping Assistance (LKA): LKA, or lane-keeping assistance, aids the driver in adhering to lane lines.
Automatic Emergency Braking (AEB): When a possible accident is detected, automatic emergency braking (AEB) engages the brakes if required.
Blind-Spot Monitoring (BSM): It warns drivers of invisible cars in nearby lanes.
Parking Assistance: Sensors are used in parking assistance to help with safe parking techniques.
Several sensors working to improve driving efficiency and safety make these functions possible. Sensor fusion is useful since depending on just one kind of sensor can result in errors.
ADAS Sensor Fusion: What is it?
The technique of merging data from many sensor types, including cameras, radar, LiDAR, and ultrasonic sensors, to produce a more accurate and dependable understanding of the surroundings is known as ADAS sensor fusion. Sensor fusion strengthens the robustness of ADAS functions by correcting for the shortcomings of individual sensors by combining data from many sources.
Radar, for example, can identify things in misty or rainy weather but lacks fine details, while cameras produce high-resolution photos but struggle in low light. When combined, these sensors offer an additional and improved view that enables cars to respond to their environment.
Different Sensor Types for ADAS

ADAS uses a variety of sensors, each with special advantages and disadvantages. Among the main kinds of sensors are:
1. Cameras
ADAS relies heavily on cameras because they offer high-resolution imagery that allows:
Identifying objects, such as cars, pedestrians, traffic signs, and lane markers.
Traffic signal identification requires color detection.
Sense of depth (with stereo cameras).
However, glare, low light levels, and weather conditions like fog and severe rain can all affect cameras.
2. Radar (Radio Ranging and Detection)
Radio waves are used by radar sensors to identify objects and determine their direction, speed, and distance. They are especially helpful in:
Detecting things in low-visibility situations (darkness, fog, or heavy rain).
Speed measurement to support adaptive cruise control.
Detecting and preventing collisions.
Radar sensors are useful, but their inability to capture precise images makes it hard to tell one item from another.
3. Light Detection and Ranging, or LiDAR
LiDAR sensors provide a high-resolution three-dimensional map of the area around the vehicle using laser beams. These sensors provide:
High measuring accuracy for object distance.
Enhanced depth awareness to identify obstacles.
Improved efficiency in applications using driverless vehicles.
LiDAR is costly, though, and it might not work well in bad weather.
4. Ultrasonic Sensors
Engineers frequently employ ultrasonic sensors in low-speed applications like the following because they measure distances using sound waves:
Help with parking.
Blind-spot identification.
Detecting proximity in sluggish traffic.
They are not appropriate for high-speed applications and have a restricted range, despite being quite effective for close-range detection.
The Role of Sensor Fusion in ADAS
Every sensor in an ADAS system has advantages and disadvantages. Sensor fusion enables ADAS to overcome the limits of individual sensors by combining data from several sources, leading to:
Improved redundancy: providing dependable operation under a variety of circumstances.
Improved decision-making by offering a comprehensive perspective of the environment around the car.
For instance, integrating camera and radar data guarantees that the ADAS system can still precisely identify objects and modify the vehicle’s speed in low-visibility situations.
Difficulties with ADAS Sensor Fusion
Despite its benefits, sensor fusion implementation has several drawbacks, such as:
1. Complexity of Data Processing
Powerful computers and complex algorithms are needed for sensor fusion to process massive volumes of data in real time. The fusion system needs to:
Analyze data from several sensors at once.
Eliminate noise and irregularities.
Give people the ability to make decisions in real-time.
2. Sensor Calibration and Synchronization
All users need to sync and calibrate the sensors correctly for reliable sensor fusion. Inaccurate data integration may arise from misalignment or variations in sensor refresh rates.
3. Expense and Demand for Computation
High-performance ECUs (Electronic Control Units) and AI-driven algorithms are needed for ADAS sensor fusion, which raises the cost of vehicles and their computing load. When deploying these systems, automakers must strike a balance between affordability and performance.
ADAS Sensor Fusion And Data Integration

In addition to ADAS Sensor Fusion and Data Integration, it uses data from other car systems, like:
Location and navigational information are provided by the GPS (Global Positioning System).
Inertial measurement units, or IMUs, measure vehicle motion and orientation.
Vehicle-to-Everything, or V2X, communication enables data transmission between cars and infrastructure to improve situational awareness.
ADAS can provide even more intelligence and accuracy by combining these data sources, opening the door for completely autonomous vehicles.
Conclusion :
The car industry is going through a transformation because of ADAS sensor fusion and data integration, which makes driving safer and more intelligent. ADAS increases perception, strengthens decision-making, and establishes the groundwork for autonomous driving by integrating input from several sensors.
ADAS will become more and more important as technology develops since it will make roads safer, lower the number of traffic accidents, and increase everyone’s mobility. For more information about our top products, like VCUs, CAN Keypads, and CAN Display and E/E Software Services, visit our website at Dorleco.com or send an email to [email protected].
#**ADASSensorFusion**#**DataIntegration**#sensors#Actuators#Dorleco#CANKeypads#CANDisplays#VCUs#Vehiclecontrolunit#EVSoftwareServices#E/Earchitectures
0 notes
Text
Active Suspension Systems
Introduction

The advancement of automobile technology has led to significant improvements in vehicle dynamics, safety, and comfort. One crucial area of development is the suspension system. In recent years, active suspension systems have gained popularity due to their ability to enhance ride comfort through intricate chassis adjustments. While conventional passive suspension systems have been in use for decades, active suspension systems represent a leap forward by dynamically adapting to road conditions in real-time. This article explores active suspension systems, their working principles, benefits, and impact on the driving experience.
Comprehending Suspension Systems

The way an automobile interacts with the road is greatly influenced by its suspension system. It is in charge of numerous crucial tasks:
1. Comfort Ride
To provide passengers with a smoother ride, a well-designed suspension system absorbs shocks and vibrations brought on by uneven road surfaces.
2. Stability of the Vehicle
The suspension system enhances stability and traction by keeping tires in touch with the road during braking, accelerating, and cornering.
3. Managing and controlling
The suspension system is essential for both safety and performance since it has a direct impact on a car’s handling, responsiveness, and overall driving characteristics.
Types of Suspension Systems
Passive and active are the two basic types into which suspension systems can be generally divided.
Passive Suspension Systems
Shock absorbers and springs are examples of fixed mechanical parts used in these systems. They are straightforward and dependable, but they are not flexible enough to adjust to shifting road conditions.
Active Suspension Systems
Active suspensions, in contrast to passive systems, continuously modify suspension settings through the use of sensors, actuators, and control algorithms. It can provide the best possible balance between handling performance and ride comfort because of its versatility.
How Do Systems of Active Suspension Operate?

An array of sensors is used by active suspension systems to track several variables, including driver inputs, vehicle speed, and road conditions. A central control unit processes this data in real time and modifies the suspension settings as necessary.
Important Elements of Systems with Active Suspension
Sensors: A variety of sensors, including height, wheel speed, and accelerometers, gather information on the movement of the car and the state of the road.
Control Unit: After analyzing sensor data, the central processing unit decides what suspension changes are required.
Actuators: Actuators are electric or hydraulic devices that change suspension characteristics, including ride height and damping rate.
Adaptive Algorithms: Advanced algorithms analyze sensor data and adjust suspension settings to improve stability and comfort.
Benefits of Active Suspension Systems
Compared to conventional passive suspension configurations, active suspension systems have several advantages:
1. Improved Comfort of the Ride
Active suspensions provide a smoother ride by rapidly correcting for road irregularities, which lessens discomfort from vibrations and bumps.
2. Better Stability and Handling
By dynamically modifying damping rates, active systems enhance vehicle stability during braking, cornering, and accelerating.
3. Reduced Body Roll
Active suspensions reduce body roll by keeping the stance level, which improves control and confidence during fast turns.
4. Personalized Driving Modes
Multiple driving modes are available in many cars with active suspension system, enabling drivers to alternate between comfort and sport settings as needed.
5. Adaptive Response to Road Conditions
To maximize comfort and safety, active suspensions continuously scan the road surface and modify settings.
6. Improved Off-Road Performance
Active suspensions enhance articulation and traction on difficult terrain, which is advantageous for off-road vehicles.
7. Integration with Autonomous Driving in the Future

Active suspension solutions will become increasingly important as self-driving technology advances to preserve ride quality and vehicle stability.
Challenges and Drawbacks of Active Suspension Systems
Here are various drawbacks despite their benefits:
1. Increased Price
Active suspensions are more expensive than passive systems because they are more complicated and expensive to produce and maintain.
2. Issues with Reliability
There is a greater chance of system failure because of the dependence on numerous electronic components, which could compromise ride quality and safety.
3. Additional Weight
Actuators, sensors, and control units increase the vehicle’s weight, which may affect fuel economy.
4. Complex Maintenance and Repairs
Active suspensions, in contrast to passive systems, are challenging for do-it-yourself maintenance since they demand specific skills and tools.
5. Restricted Access
Active suspension systems are currently only found in luxury or high-end cars, which restricts their wider use.
6. Delay in Adaptation
The efficacy of these systems in responding to unplanned road hazards may be impacted by minor response delays, despite their rapid reaction to changes.
7. Reduced Feedback from Drivers
Active suspension systems, according to some auto fans, lessen the tactile connection between the driver and the road, which detracts from the enjoyment of driving.
Conclusion :
Active suspension systems are an amazing development in vehicle technology. They greatly enhance handling, safety, and ride comfort. Their real-time suspension setup adjustments improve the whole driving experience. These systems have many advantages, from lowering body roll and vibrations to providing adjustable driving modes.
Active suspensions do have drawbacks, though, such as increased expenses, difficult upkeep, and possible reliability issues. Notwithstanding these disadvantages, however, they are anticipated to proliferate as costs come down and technology improves, establishing new benchmarks for vehicle dynamics and comfort in the automotive sector.
Dorleco is a leader in automotive innovation, providing state-of-the-art EV software services, CAN keypads, CAN displays, and VCUs. As the go-to partner for next-generation automotive technology, our solutions improve vehicle performance, safety, and efficiency. With Dorleco’s cutting-edge vehicle control and display solutions, you can enjoy unmatched quality and dependability. For additional information, email us at [email protected].
#Activesuspensionsystem#AutonomousVehicle#sensors#Actuators#Dorleco#CANKeypads#CANDisplays#VCUs#Vehiclecontrolunit#EVSoftwareServices#E/Earchitectures
0 notes
Text
Connected Autonomous Vehicles (CAVs)
Introduction

The term “connected autonomous vehicles” (CAVs), sometimes known as “autonomous cars” or “self-driving cars,” refers to a major development in the transportation and automotive sectors. In addition to having cutting-edge technology that enables autonomous driving, these modern cars are connected to the Internet and the larger transportation system. CAVs have the potential to completely transform mobility by improving the safety, effectiveness, and convenience of transportation.
Connected autonomous vehicles range from partially to fully autonomous in terms of automation. To assess their surroundings and make decisions while driving, they use a variety of sensors, cameras, lidar, radar, and complex algorithms. These cars seek to drastically lower human error, a major contributor to traffic accidents, by efficiently navigating traffic, handling crowded intersections, and adjusting to changing road conditions.
The networking component of CAVs is equally significant. These cars’ advanced communication systems enable data interchange with pedestrian devices, traffic control systems, and other CAVs. Through vehicle-to-infrastructure (V2I) interactions, they can transmit information about traffic, road conditions, and risks. This real-time data sharing is essential for improving road safety and traffic management.
Among the many benefits of CAVs are the potential to significantly reduce traffic accidents, provide accessibility for individuals who are unable to drive, and improve traffic efficiency. To guarantee a seamless transition to this new era of mobility, however, obstacles including cyber security concerns, high implementation costs, and regulatory issues must be resolved.
Connected Autonomous Vehicles’ (CAVs’) benefits
Autonomous connected cars have the potential to revolutionize both society and transportation. The following are some of the main advantages of CAVs:
1. Increased Security
The ability of CAVs to lower traffic accidents and mortality is one of its biggest benefits. Conventional driving depends on human perception and reaction time, which can fluctuate because of weariness, distractions, or poor decision-making. Contrarily, CAVs use artificial intelligence and high-precision sensors to identify dangers, respond more quickly, and make better driving judgments. By averting crashes and coordinating vehicle movements, vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication further improves road safety.
2. Reduced Traffic Congestion

By optimizing speed and spacing, connected autonomous vehicles (CAVs) can lessen the stop-and-go traffic patterns that fuel traffic jams. They can choose the most effective routes by interacting with other cars and traffic management systems, which enhances traffic flow in general. This results in a cleaner environment by cutting down on emissions, fuel consumption, and travel time.
3. Enhanced Usability
CAVs provide fresh freedom and mobility to people who are unable to drive because of age, disability, or other factors. By offering individualized transportation alternatives, these cars can help more people visit loved ones, go to work, and access necessary services without depending on human-driven modes of transportation.
4. Better Fuel Economy and Environmental Advantages

CAVs are made to run as energy-efficiently as possible. These vehicles help reduce fuel consumption by choosing the most economical routes, cutting down on idle time, and making smoother decisions about braking and accelerating.
Furthermore, greenhouse gas emissions will further decline as electric and hybrid CAVs proliferate, creating a more environmentally friendly transportation system.
5. Less Demand for Parking Spots
Large parking lots may become less necessary in metropolitan areas as a result of CAVs’ ability to drop off passengers and locate parking spots on their own. Cities may be able to repurpose parking spots into residential zones, green spaces, or commercial projects as a result of more effective land use.
6. Job Creation and Economic Growth
New opportunities will arise in sectors like software development, infrastructure improvement, and vehicle maintenance as a result of the development and application of CAV technology. Additionally, productivity may rise as a result of CAVs’ ability to let passengers work or unwind throughout their travel, which would be advantageous for both individuals and companies.
7. A Higher Standard of Living
Passengers can work, play, or unwind during their travel when autonomous cars take over driving duties. This change has the potential to greatly improve mental health, lessen the stress brought on by traffic, and improve the trip experience in general.
Challenges and Disadvantages of CAVs
Although CAVs have many advantages, there are a few issues that need to be resolved before they can be widely used. Some of the primary drawbacks are as follows:
1. Concerns about safety and cyber security
Although CAVs can lessen accidents caused by human error, they are not impervious to technological malfunctions or cyber-attacks. Autonomous systems may be manipulated by hackers, posing a safety risk. Addressing these issues requires implementing strong cyber security safeguards and fail-safe procedures.
2. High Initial Costs
Because CAV technology requires sophisticated gear like lidar, radar, and AI-driven software, its development and implementation are costly. Early accessibility and affordability may be constrained by the substantial investment needed for car fleets and related infrastructure.
3. Difficulties in Adapting Infrastructure
Significant adjustments to the road infrastructure, such as high-speed communication networks, digital road signs, and smart traffic signals, are necessary for a widespread transition to CAVs. Existing infrastructure retrofitting can be expensive and time-consuming.
4. Concerns about Privacy
For CAVs to operate effectively, enormous volumes of data must be gathered and transmitted. Concerns over data ownership and privacy and possible abuse by producers or other organizations are brought up by this. To preserve user privacy and data, clear regulations must be put in place.
5. Job Displacement
When autonomous technology replaces human drivers in sectors like public transit, trucking, and ride-hailing, job displacement may become a serious social and economic problem. Businesses and governments must implement retraining and reskilling initiatives to handle workforce shifts.
6. Complexities of Regulation and Liability

The law about CAVs is continually developing. Determining liability in incidents involving autonomous vehicles might be difficult because manufacturers, software developers, or fleet operators may hold themselves accountable.
Authorities must establish clear legal frameworks for integration to go smoothly.
7. Overreliance on Technology
Society may become more susceptible to unplanned system malfunctions, outages, or failures as a result of growing reliance on CAVs. Reducing possible dangers will need keeping human oversight and making sure redundancy systems are in place.
Conclusion :
The transportation sector is undergoing a revolutionary change because of connected autonomous vehicles (CAVs), which provide unmatched advantages in terms of accessibility, efficiency, and safety. With their cutting-edge connection and technology, these cars have the power to transform urban mobility, lessen their negative effects on the environment, and enhance people’s quality of life in general. To guarantee a smooth transition, nevertheless, we must resolve several important issues, from infrastructure adaptation and economic ramifications to cyber security risks and legal issues.
Working together, governments, corporations, and academic institutions will be essential as the sector develops safety procedures, cyber security guidelines, and legislative frameworks for CAV integration. By proactively tackling these issues, we can create the foundation for a more intelligent, secure, and effective transportation system in the future.
Dorleco is at the forefront of automotive innovation, offering cutting-edge products and services such as Vehicle Control Units (VCUs), CAN Displays, CAN Keypads, and EV software solutions. Our expertise in automotive technology helps drive the future of connected autonomous vehicles, ensuring efficiency, safety, and seamless integration. Partner with us to shape the future of mobility!
#ConnectedVehicles#CAVs#GridIntegration#AutonomousVehicle#Dorleco#CANKeypads#CANDisplays#VCUs#Vehiclecontrolunit#EVSoftwareServices#E/Earchitectures
0 notes
Text
Autonomous Vehicle Hardware
Introduction

Self-driving automobiles, also known as autonomous vehicles, are at the forefront of advanced technology. They have the power to completely transform transportation by enhancing accessibility, safety, and efficiency. To drive and function independently, these cars need a complex mix of autonomous vehicle hardware and software. The hardware elements are the foundation of the vehicle’s operation, even though the software is essential for data processing and decision-making. This article explores the fundamental hardware elements of autonomous cars, stressing their advantages, difficulties, and overall influence on transportation in the future.
Important Autonomous Vehicle Hardware Elements for Self-Driving Cars
1. Sensors: Autonomous Vehicles’ Eyes and Ears

LiDAR (light detection and ranging): LiDAR sensors produce high-resolution three-dimensional maps of their surroundings by using laser pulses. LiDAR is essential to real-time decision-making because it correctly detects the position and motion of objects, pedestrians, and other vehicles.
Radar: Radar sensors, as opposed to LiDAR, use radio waves to measure the speed and distance of objects. Because they are less impacted by rain, fog, or snow, they are very useful in inclement weather and provide dependable operation in a variety of settings.
Cameras: Using sophisticated computer vision techniques, high-resolution cameras record visual data. In addition to being essential for object categorization and lane detection, these cameras aid in object recognition, traffic sign detection, and pedestrian discrimination.
Ultrasonic sensors: These sensors help in short-range detection by timing how long it takes for sound waves to reflect off of nearby objects. They are mostly employed for adjacent obstacle detection and parking assistance.
GPS (Global Positioning System): The Global Positioning System, or GPS, helps autonomous cars pinpoint their exact location and create the best routes by providing precise localization and navigation data.
2. Computing Hardware: Automation’s Brain

Large volumes of sensor data require sophisticated computer technology to process. Important elements consist of:
Central Processing Unit (CPU): The CPU handles general processing duties and instantly analyzes data from several sensors.
Graphics Processing Unit (GPU): Because GPUs are designed to handle complicated visual data, they are crucial for deep learning and image processing applications in driverless cars.
Field-Programmable Gate Arrays (FPGAs): FPGAs provide highly efficient real-time processing of sensor data. They are appropriate for specialized tasks like signal processing and machine learning inference because of their reprogrammable nature.
Sensor Fusion Units: These devices combine information from several sensors to produce a coherent and precise picture of the environment around the car, facilitating smooth decision-making and improved safety.
3. Control Systems: Facilitating Accurate Vehicle Functions
Sophisticated control systems are necessary for autonomous cars to make driving judgments. These consist of:
Actuators: In charge of steering, braking, and accelerating, actuators convert computer commands into mechanical motions to guarantee accurate and seamless vehicle movement.
Drive-By-Wire Systems: These electronic control systems increase vehicle control precision and response time by substituting digital commands for conventional mechanical linkages.
4. Communication Systems: Improving Safety and Connectivity
The safe and efficient operation of autonomous cars depends on effective communication. Among the essential communication technologies are:

5. Redundancy and Safety Systems: Guaranteeing Dependability
Autonomous vehicles use a variety of fail-safe techniques to reduce hazards, including emergency braking systems, redundant sensors, and backup power systems, which guarantee that the vehicle will continue to function even if a component fails.
6. Human-Machine Interface (HMI): Improving Communication with Users
Through intuitive features like speech recognition and visual displays, the HMI makes it easier for passengers to engage with the car and guarantees a smooth user experience.
Autonomous Vehicle Hardware Benefits
1. Increased Security
Increased safety is one of the biggest advantages of autonomous car hardware. Autonomous systems can significantly lower the risk of accidents by reducing human faults like weariness and distraction. Real-time processing guarantees speedy reaction times, and sophisticated sensors offer a 360-degree view of the environment, enabling prompt detection of dangers and obstructions.
2. Fewer Traffic Jams
To maximize traffic flow, autonomous cars interact with other cars and traffic infrastructure. Choosing the quickest routes, easing gridlock, and increasing overall transportation efficiency are all made possible with GPS and real-time traffic data.
3. Reduced Emissions and Fuel Use
Autonomous vehicles can drastically cut pollutants and fuel consumption by improving their acceleration and deceleration patterns. Furthermore, eco-driving algorithms improve energy efficiency even more, making the environment greener.
4. Enhanced Availability
For those who are unable to drive because of age, disability, or other reasons, autonomous vehicles offer more mobility. A larger populace benefits from the easy and reasonably priced transportation options provided by ride-sharing and autonomous taxi services.
5. A decrease in traffic fatalities and accidents
Autonomous vehicle hardware can drastically lower traffic accidents and fatalities by removing human error and integrating cutting-edge safety features.
6. Effective Parking Administration
Autonomous cars can park themselves and drop off passengers at their destinations, which eases traffic in cities and maximizes parking space use.
7. Economical Transportation
As driverless car fleets run by ride-sharing businesses proliferate, fewer people could need to purchase private vehicles, which would lower overall expenses and ease traffic.
8. Improved Traffic Control
Better control of traffic lights and congestion patterns is made possible by the valuable data that autonomous vehicles provide to traffic management systems.
Limitations and Difficulties with Autonomous Vehicle Hardware
1. Expensive
Widespread adoption is hampered by the high cost of the sophisticated technology needed for autonomous vehicles, such as LiDAR sensors, potent CPUs, and redundant systems.
2. Complexity of the System
Autonomous vehicles are difficult to maintain and debug due to their complex hardware and software combination, which raises operating expenses.
3. Issues with Reliability
Even with redundant systems in place, hardware issues, and unplanned breakdowns are still possible hazards that must be managed.
4. Risks to Cyber security
Because autonomous cars are vulnerable to cyberattacks, strong security measures are necessary to stop illegal access and system manipulation.
5. Ethical Dilemmas
Critical decision-making raises moral and ethical issues that need serious thought, such as deciding between passenger and pedestrian safety.
6. Displacement of Jobs
Autonomous Vehicle Hardware adoption on a large scale could result in employment losses in sectors like logistics and transportation, requiring workforce adaptability.
7. Readiness of Infrastructure

8. Privacy Issues with Data
Large volumes of data are gathered on passengers and their environment by autonomous cars. To keep the public’s trust, data security and privacy must be guaranteed.
Conclusion:
A key factor in determining how transportation will develop in the future is autonomous vehicle hardware. These vehicles can function safely and effectively with little assistance from humans thanks to the integration of sophisticated sensors, computer systems, control mechanisms, and communication networks. Even though there are many benefits, there are drawbacks that need to be carefully considered, including high expenses, system complexity, cybersecurity threats, and moral quandaries. To overcome these challenges and fully utilize autonomous vehicles, cooperation between governments, tech firms, and the general public is essential.
Visit Dorleco or send an email to [email protected] for additional information on our autonomous vehicle solutions.
#Autonomousvehiclehardware#GridIntegration#AutonomousVehicle#Dorleco#CANKeypads#CANDisplays#VCUs#Vehiclecontrolunit#EVSoftwareServices#E/Earchitectures
0 notes
Text
Smart Charging Solutions and Grid Integration
Overview

The need for electric vehicles (EVs) is growing as the globe transitions to a more ecologically friendly, electrically powered future. By lowering greenhouse gas emissions and dependency on fossil fuels, EVs have substantial environmental advantages. But they also pose special difficulties, especially when it comes to the infrastructure needed for smart charging solutions and how they connect to the power grid.
Grid connectivity and sophisticated charging solutions are essential in this situation. Smart charging solutions are changing how EVs communicate with the power grid by integrating renewable energy sources, optimizing energy distribution, and minimizing peak demand problems.
This blog will discuss the significance of grid integration and smart charging systems, as well as their advantages, disadvantages, and possible solutions to guarantee smooth deployment.
The Increasing Demand for Grid Integration and Smart Charging Solutions

1. Growing Uptake of Electric Cars
Government subsidies, increased environmental concerns, and technological breakthroughs are all contributing factors to the growing popularity of EVs. EVs put more load on the electrical grid even while they reduce carbon emissions. The demand for sustainable and effective charging options grows as more people move to electric vehicles.
The widespread use of EVs may result in grid congestion, higher electricity costs, and possibly power disruptions if smart charging solutions are not developed. By optimizing charging patterns and managing energy consumption, intelligent charging infrastructure can alleviate these issues.
2. Resolving Issues with Charging
If conventional charging techniques are not well controlled, they may cause excessive demand during peak hours, which could overload the grid. Problems including higher electricity prices, less stable grids, and inefficient energy delivery can result from this.
Smart charging systems use cutting-edge hardware, software, and communication protocols to address these issues. These innovations maximize charging through:
Changing pricing rates in response to grid demand
Making use of off-peak times to reduce grid strain
Making effective use of the available energy resources
Enabling users to remotely schedule and monitor charging
Energy providers can preserve grid stability and guarantee EV users have access to dependable charging stations by putting these strategies into practice.
The Enhancement of Grid Integration through Smart Charging Solutions

1. Improving Convenience for Customers
The convenience that smart charging solutions provide to EV owners is among their most important advantages. Customers may optimize their charging schedules without interfering with their regular routines thanks to features like automated energy distribution, scheduling, and remote monitoring.
Using web platforms or mobile apps, consumers can:
Plan your charging sessions for off-peak times.
Track energy usage in real-time.
Adapt your charging preferences to the cost of electricity.
Because of this flexibility, EV users may save money and increase grid dependability while charging their cars effectively.
2. Grid Stabilization
By providing demand response capabilities, integrating EV charging infrastructure with the current power system contributes to stability. Power usage can be dynamically adjusted by smart charging systems in response to current grid conditions. For example, charging stations can lower power draw during periods of heavy grid demand, preventing outages and improving overall resilience.
Furthermore, EVs can return excess energy to the grid through bidirectional charging, often known as Vehicle-to-Grid (V2G) technology. This cutting-edge capability enables cars to act as temporary energy storage devices, boosting grid efficiency overall and supplying extra power during times of high demand.
3. Including Renewable Energy Sources
The integration of renewable energy sources like solar and wind power is one of the most promising features of smart charging solutions. These technologies lessen dependency on non-renewable power sources and the transportation sector’s overall carbon footprint by timing EV charging with times of high renewable energy output.
For instance, smart charging systems might give priority to EV charging on bright afternoons when solar panels provide the most electricity. In a similar vein, EVs can be charged at night using wind energy, guaranteeing the best possible use of sustainable energy sources.
Grid Integration and Smart Charging Solutions challenges
1. Expensive initial implementation costs
The high initial cost of infrastructure development is one of the main barriers preventing smart charging options from being widely adopted. It costs a lot of money to install smart charging stations, upgrade grid gear, and set up sophisticated communication networks.
To lessen the financial burden and hasten the rollout of smart charging networks, governments, and energy providers should look at financial incentives, subsidies, and collaborations with private organizations.
2. Problems with Interoperability and Technical Complexity
Several hardware and software components must be managed to integrate smart charging systems with the current power grid architecture. It can be difficult and time-consuming to guarantee compatibility across various charging stations, grid operators, and energy management systems.
Establishing industry-wide standards and procedures is necessary to address this issue. Compatibility and efficient operation will be guaranteed by transparent communication channels and easy data sharing amongst various parties.
3. Data Security and Privacy Issues
Numerous pieces of data are gathered by smart charging systems, such as location, energy usage patterns, and user charging behaviors. Gaining the trust of customers and avoiding illegal access or breaches depend on protecting the security and privacy of this data.
Strong cyber security measures, such as encryption techniques and secure authentication systems, can achieve data integrity and protect user information.
4. Needs for Grid Modernization
As EV use continues to grow, we might need to make large-scale improvements to the current electrical system. To meet the growing power demand, it will be crucial to implement improved grid management technology, increase grid capacity, and enhance energy storage options.
These improvements are essential to guaranteeing grid sustainability and dependability in the long run, even though they come with a high planning and investment cost.
5. Financial Rewards and Regulatory Assistance
Governments might implement tax credits, subsidies, and incentives. to encourage the construction of smart charging infrastructure Additionally, clear regulatory frameworks will promote investment in grid modernization and facilitate integration initiatives.
6. Investing in Research and Development

Ongoing innovation in energy storage technologies, grid management software, and smart charging solutions will further improve efficiency and scalability. Researchers should focus on enhancing cost-effectiveness, security, and interoperability as their main goals.
Conclusion
The effective transition to a sustainable energy and transportation ecosystem depends on smart charging solutions and grid integration. These technologies play a major role in lowering carbon emissions and advancing environmental sustainability by improving grid stability, integrating renewable energy sources, and optimizing EV charging.
Proactive initiatives, industry collaboration, and policy assistance can help overcome constraints like high costs, technical complexity, and data security concerns. Smart charging technologies can completely transform how we control energy use and mobility with further development and thoughtful use.
As the global shift towards clean energy accelerates, embracing smart charging and grid integration will be crucial to creating a resilient, efficient, and eco-friendly electric vehicle ecosystem. Through innovation and cooperation, we can ensure a greener, smarter, and more sustainable future for all.
Dorleco is revolutionizing the EV industry with cutting-edge Vehicle Control Units (VCUs), CAN Displays, CAN Keypads, and EV software solutions. Our smart charging solutions and grid integration solutions optimize energy efficiency, enhance grid stability, and ensure seamless EV operation. Partner with Dorleco to drive the future of intelligent, sustainable mobility.
#SmartChargingSolutions#GridIntegration#AutonomousVehicle#Dorleco#CANKeypads#CANDisplays#VCUs#Vehiclecontrolunit#EVSoftwareServices#E/Earchitectures
0 notes
Text
Traction Control Systems and Chassis Control Logic
Introduction

The two most important pillars in the field of automotive engineering are performance and safety. Automakers have always tried to find a balance between these crucial elements as technology has developed.
To achieve that balance and ensure that cars provide the best possible performance while upholding the highest standards of safety and stability, contemporary developments like Traction Control Systems (TCS) and Chassis Control Logic (CCL) are essential. Modern cars now come equipped with these technologies, which increase their dependability and efficiency in a variety of driving scenarios.
The fundamentals of these technologies, their constituent parts, their interactions, and the numerous advantages they offer to the driving experience are all examined in this blog. We can understand TCS and CCL’s function in modern car dynamics by comprehending how they operate.
Traction Control Systems (TCS)

The purpose of Traction Control Systems (TCS), a crucial part of an automobile’s electronic stability control system, is to preserve the best possible wheel traction when accelerating.
The chance of losing traction in difficult driving situations rises as cars get stronger and can accelerate more quickly. TCS mitigates this risk by limiting excessive wheel spin, particularly when the car accelerates on slick terrain like snow, ice, or wet roads.
Crucial Elements and Roles of Traction Control Systems
Wheel-Speed Sensors: To track the wheels’ rotational speed, TCS installs sensors on each wheel. The system receives real-time data from these sensors and uses it to identify any variations in wheel speed, which are a sign that one or more wheels are sliding or spinning more quickly than the others.
Engine Control Module (ECM): The engine control module, or ECM, is in charge of regulating engine power to stop wheel spin. To minimize slide, the ECM can temporarily lower engine power to a tire that begins to lose traction by adjusting ignition timing or reducing throttle input.
Brake Actuation: TCS can apply brake pressure to particular wheels in addition to managing engine power. By slowing down the spinning wheel and redistributing torque, this aids in the vehicle’s traction recovery.
Intelligent Control Logic: Smart control algorithms in advanced TCS systems evaluate sensor data to identify the optimal strategy for traction maintenance without sacrificing performance. By limiting excessive wheel spin, these technologies help to maintain the best possible vehicle stability.
How TCS Works in Practice
The technology continuously tracks each wheel’s speed when the driver accelerates. The system kicks off when one or more wheels start spinning more quickly than the others, which is a sign of a loss of traction.
Either either lowering engine power or by selectively applying the brakes to one or more wheels, TCS can step in. Without requiring any input from the driver, the intervention is mild yet effective, enabling the car to restore traction swiftly and safely.
CCL, or chassis control logic
A collection of advanced technologies and control systems known as chassis control logic (CCL) maximizes a car’s handling, stability, and general driving characteristics. By combining several vehicle control technologies, this system improves performance and offers a controlled, balanced, and smooth driving experience.
The car can adjust to a variety of driving circumstances thanks to the interaction between CCL and other systems including TCS, ABS (Anti-lock Braking System), and ESC (Electronic Stability Control).
Essential Elements and Purposes of Chassis Control
Electronic Stability Control (ESC): ESC stands for Logic Electronic Stability Control. An essential component of CCL is ESC. Using the brakes selectively and, in certain situations, lowering engine power to steady the vehicle, helps avoid skidding and losing control. It works especially well when there are abrupt turns or when a car starts to oversteer or understeer.
Anti-lock Braking System (ABS): ABS keeps the wheels from locking up when applying severe braking, preserving steering control. By distributing braking forces evenly among the wheels, ABS makes it possible for the car to stop swiftly and safely without losing stability.
Electronic Brake-force Distribution (EBD): EBD modifies the brake force distribution between the front and back wheels to maximize braking. Road conditions, speed, and vehicle load are some of the variables that affect this adjustment. ABS and EBD combine to enhance total braking performance.
Adaptive Suspension Systems: Adaptive suspension systems, which automatically modify shock absorber settings, are a characteristic of certain cars with CCL. Through improved cornering stability, a smoother ride, and road condition adaptation, these systems can improve handling.
How CCL Works in Practice?

CCL collects information from a variety of sensors that track the activity of the car. These sensors, which identify any changes in the dynamics of the vehicle, include wheel-speed sensors, gyroscopes, and accelerometers.
To guarantee the best handling and stability, the CCL system continuously modifies the suspension, steering, braking, and other vital components based on this data. To restore stability, the system might, for example, alter engine power, change the suspension, or apply brakes to particular wheels if it notices a loss of traction during a turn.
The Advantages of Chassis and Traction Control Systems (TCS)
Logic of Control (CCL)
Numerous benefits that greatly enhance vehicle performance, safety, and stability are provided by both TCS and CCL. These technologies make modern cars more reliable and flexible for the driver by improving their performance in a variety of driving situations.
Traction control systems (TCS) advantages
Enhanced Traction: Even in slick weather like rain or snow, TCS makes sure the car keeps its maximum traction by minimizing wheel spin. As a result, the driver can continue to steer the car without fear of losing control.
Better Acceleration: TCS helps to make acceleration more controlled and smooth. TCS ensures that power is delivered to the road effectively during rapid acceleration by preventing wheel spin, which improves vehicle performance.
Decreased Skidding Risk: TCS improves overall vehicle stability by reducing the chance of skidding during abrupt turns by enhancing traction and managing wheel spin.
Enhanced Off-Road Capability: TCS makes sure the car maintains traction when driving off-road or on uneven terrain, assisting drivers in navigating difficult situations.
Enhanced Safety: By reducing traction loss, particularly during fast twists or emergency maneuvers, TCS greatly increases safety. This facilitates drivers’ ability to keep control, especially under challenging circumstances.
Easy to use: TCS is a completely automated system that doesn’t require any input from drivers, thus drivers of all experience levels can use it. Overall driving safety and confidence are raised as a result.
Chassis Control Logic’s (CCL) advantages
Better Management: CCL improves a car’s handling and cornering skills by modifying the steering and suspension. This makes driving more responsive and smooth, especially when negotiating tight curves or difficult road conditions.
Enhanced Stability: CCL enhances stability, especially when navigating curves or performing fast turns, by coordinating with other systems like ESC and ABS. This lessens the chance of skidding or rollover, particularly in higher cars like trucks and SUVs.
Optimal Braking: By ensuring that the vehicle’s braking power is distributed evenly across all wheels, ABS and EBD work together to improve brake efficiency and shorten stopping distances.
Customized Driving Modes: Certain cars with CCL include driving modes that can be changed, such as sport, comfort, and eco. To suit the driver’s preferences and the state of the road, these modes modify the throttle sensitivity, steering response, and suspension firmness.
Improved Vehicle Control: By enhancing vehicle control, features like torque vectoring and variable steering assistance make it simpler to handle challenging driving situations.
Decreased Tire Wear: CCL helps avoid uneven tire wear by more uniformly transmitting forces over all four wheels, which extends tire life.
The disadvantages of chassis control logic (CCL) and traction control systems (TCS)
Although TCS and CCL have many benefits, these systems do have certain disadvantages.
Traction control systems (TCS) disadvantages
Diminished Power Output: TCS may briefly lower engine power or apply braking force when it steps in to limit wheel spin. This may cause a brief drop in acceleration performance, which in some circumstances — particularly for high-performance cars — may not be acceptable.
Loss of Driver Control: For seasoned drivers who would rather manually control traction, TCS intervention may occasionally feel excessively harsh. A sense of lost control may result from this.
Limited Off-Road Effectiveness: Although TCS works well on paved roads, it may not operate as well off-road, especially when negotiating obstacles that need wheel spin for traction.
False Activation: On rare occasions, TCS may mistakenly identify wheel slips in traffic or under mild acceleration, resulting in needless interventions that could irritate drivers.
Cost and Complexity: Production costs and vehicle complexity are raised by the incorporation of TCS systems. Over time, this may lead to increased maintenance expenses.
Chassis Control Logic (CCL) drawbacks
Enhanced Intricacy: The combination of many control systems, such as adaptive suspension, ABS, and ESC, can result in a complicated configuration that can be expensive and challenging to fix.
Dependency on Sensors: Electronic components and sensors are crucial to CCL. The whole functionality of the system may be impacted if any of these parts malfunction, raising safety issues.

Driver Adaptation: When the system modifies the handling or responsiveness of a vehicle, some drivers may find it difficult to become used to the new behavior.
Restricted Off-Road Capability: Although CCL improves handling and stability on roads, it might not provide the same advantages off-road, where other factors are in work.
Environmental Impact: Non-electric vehicles may use less fuel due to the increased energy consumption caused by the additional electronic components needed for CCL systems.
Conclusion:
To sum up, modern cars have been transformed by revolutionary technology like Chassis Control Logic (CCL) and Traction Control Systems (TCS).
Together, these systems enhance vehicle performance, safety, and stability, enabling cars to confidently traverse a variety of road conditions.
Although there are certain disadvantages, these technologies’ advantages in improving driving comfort and safety greatly exceed any possible difficulties. We may anticipate that these systems will grow even more as car technology develops, improving everyone’s driving experience.
We at Dorleco are at the forefront of automotive technology, offering state-of-the-art VCU, CAN Keypads, and CAN Display products suppliers and E/E Software services that improve the performance, stability, and safety of automobiles.
Our cutting-edge Chassis Control Logic (CCL) and Traction Control Systems (TCS) are made to provide exceptional driving control, smooth handling, and maximum traction in any situation.
The TCS and CCL technologies from Dorleco guarantee a more responsive, safe, and comfortable driving experience by controlling slick surfaces, boosting acceleration, and improving overall vehicle stability.
Every step of the way, Dorleco gives drivers performance, confidence, and peace of mind because of our dedication to innovation and quality. For the future of superior automobiles, rely on Dorleco.
#TractionControl#ChassisControl#Autonomous Vehicle#Dorleco#CANKeypads#CANDisplays#VCUs#Vehiclecontrolunit#EVSoftwareServices#E/Earchitectures
0 notes
Text
The Future Of Autonomous Driving And Emobility Controls
Introduction

Two disruptive technologies—autonomous driving and eMobility controls—are coming together to cause unprecedented changes in the transportation industry. Electric vehicles (EVs) and self-driving technologies show great potential as the globe moves toward sustainable and efficient mobility solutions. The intricate systems known as eMobility controllers, which monitor and optimize EVs and charging infrastructure, are at the heart of this change.
By exploring the relationships between mobility control systems and autonomous driving, this blog will investigate the future of transportation by looking at the opportunities, difficulties, and synergies between this two technologies.
Autonomous Driving And Emobility Controls: A New Era of Mobility
Vehicles can function without human assistance thanks to autonomous driving technology, also known as self-driving or driverless technology. To sense their surroundings, make decisions, and travel safely, these cars use a variety of sensors, cameras, LiDAR, radar, GPS, and sophisticated algorithms.
The desire for better mobility accessibility, less traffic, and higher road safety is what is driving the development of autonomous vehicles, or AVs. AVs may continuously learn and improve their driving behaviors by combining artificial intelligence (AI) and machine learning, which will increase efficiency and safety even more.
The Intersection between Autonomous Driving And Emobility Controls
Despite being separate technologies, eMobility controls and autonomous driving together have the potential to completely transform transportation networks in several ways.
1. Efficient Planning of Routes
Real-time information from the charging infrastructure can be used by eMobility controls and autonomous driving to improve route planning. Autonomous EVs can choose the most efficient routes, limiting charging stops and cutting down on wait times at charging stations, by examining patterns of energy consumption and the locations of available charging stations.
2. Driving Techniques That Consider Energy
Energy-efficient driving techniques can be developed by combining eMobility controls with autonomous driving technologies. To increase efficiency and range, variables like energy consumption, battery state of charge (SoC), and regenerative braking are considered. As a result, EVs use less energy and have longer battery lives.
3. Optimization of Fleet Management

Autonomous EV fleets can improve operational efficiency by incorporating eMobility controls. A centralized system can receive information from vehicles about their energy needs, anticipated arrival times at charging stations, and charge levels. This makes it possible to manage charging, dispatch effectively, and make real-time adjustments to maximize fleet performance.
4. Less Human Involvement
By reducing the need for human intervention, autonomous driving frees up EV users to concentrate on other duties like planning charging times, utilizing infotainment systems, or working or playing while traveling.
Challenges and Considerations
Although the combination of autonomous driving and Emobility controls offers many advantages, there are a few issues that need to be resolved to guarantee a smooth rollout:
1. Redundancy and safety
Robust redundancy systems and fail-safe measures are necessary to guarantee the safety of autonomous EVs. To reduce potential faults and guarantee dependable operation, eMobility controls must be integrated with autonomous driving through thorough testing, failover plans, and backup systems.
2. Data security and communication
Communication between autonomous cars and other network systems, including the charging infrastructure, must be smooth. To avoid data breaches, cyber threats, and unwanted access, secure communication techniques are crucial. Advanced encryption techniques and blockchain technology can aid in the protection of private data.
3. Readiness of Infrastructure
The smooth integration of charging infrastructure with navigation and route planning systems is essential to achieving the full potential of autonomous driving and eMobility controls. It is essential to invest in vehicle-to-grid (V2G) technologies, smart charging stations, and grid modernization.
4. The Framework for Regulation
The dynamic environment of bidirectional energy flow and autonomous driving necessitates flexible regulatory frameworks. To guarantee a seamless transition to autonomous and electric transportation, policymakers must set rules for safety, liability, data privacy, and interoperability.
Future Opportunities and Synergies
As technology develops, several fascinating prospects present themselves at the nexus of autonomous driving and Emobility Controls driving:
1. MaaS, or mobility as a service

MaaS platforms can easily incorporate autonomous EVs to offer on-demand transportation services. MaaS systems can improve accessibility, save operating costs, and increase mobility efficiency by streamlining charging schedules and energy usage.
2. Fleets with Intelligent Charging
Fleets of autonomous EVs can serve as networks of dynamic charging stations. To improve grid stability and energy efficiency, vehicles with V2G technology can identify regions with high demand and either redistribute stored energy back to the system or provide electricity to other vehicles.
3. Adaptive Driving Modes

Driving modes can be changed by autonomous driving systems in response to current grid demand and energy availability. For instance, cars can emphasize energy-efficient driving techniques during high-demand hours and maximize speed and acceleration for improved performance during off-peak hours.
4. Data-Driven Insights
Self-driving EVs gather enormous amounts of data that offer important insights into patterns of energy consumption, charging habits, and driving behaviors. This data can optimize the construction of charging infrastructure, improve car design, and guide future mobility policy.
Conclusion
The transportation sector is undergoing a radical change as a result of the combination of autonomous driving and Emobility controls. We can build a transportation ecosystem that is safer, more effective, and more ecologically friendly by fusing the efficiency of electric mobility with the independence of self-driving technology.
The convergence of these two domains will expedite the shift towards intelligent and sustainable transportation as technology advances. To fully realize the potential of autonomous EVs, businesses and stakeholders must collaborate to solve obstacles, improve infrastructure, and create strong regulatory frameworks.
Visit Dorleco.com or send us an email at [email protected] to find out more about our products like VCU, CAN Keypads, CAN Display & E/E Software Services, mobility control, and autonomous driving solutions
#Autonomousvehicle#Dorleco#CANKeypads#CANDisplays#VCUs#Vehiclecontrolunit#EVSoftwareServices#E/Earchitectures
0 notes
Text
User Interface and User Experience in eMobility Controls
Introduction

User interface and user experience are important considerations when creating controls for eMobility systems, such as electric scooters and electric cars (EVs). These components guarantee that consumers can interact with and use eMobility systems effectively. Adoption rates, safety, and user pleasure can all be greatly impacted by a well-designed UI/UX. The essential ideas and factors for creating a successful UI/UX for eMobility controls, as well as their significance and possible difficulties, will be covered in this blog.
Comprehending the User Interface (UI)
The interactive and visual elements that let users interact with eMobility controls are referred to as the user interface (UI). In addition to offering crucial vehicle information, a well-designed user interface guarantees accessibility and ease of use. Important components of an eMobility user interface are:
1. Simplicity and Clarity
With little effort, users can comprehend car controls thanks to a clear and straightforward user interface. The user experience can be enhanced by minimizing clutter and utilizing logical layouts, readable typefaces, and understandable icons.
2. Physical controls and touchscreen
Both physical buttons and knobs and touchscreen displays are used in contemporary eMobility systems. All controls are positioned and operated with ease, even when driving, thanks to an ideal user interface design.
3. Visual Input
Real-time vehicle status updates via visual feedback improve user interaction. Among the examples are:
Indicators of battery level
Speed indicator
Active buttons’ colors change
4. Regularity
A consistent user interface (UI) makes the interface more predictable and easy to use by guaranteeing that all buttons, icons, and labels have the same design.
5. Availability
Users with disabilities should be accommodated in a well-designed user interface. Inclusion can be improved by features like high-contrast screens, voice instructions, and screen readers.
Understanding User Experience (UX)

UX includes all aspects of a user’s interaction with an eMobility system, including its appearance, usability, and emotional resonance. Efficiency, security, and user happiness are guaranteed by a flawless UX. Important UX factors include:
1. Effectiveness
Important functions like starting, halting, and speed adjustment should be easy for users to accomplish. Usability is improved when fewer steps are needed.
2. Security
By avoiding unintentional activations and indicating potential dangers, a user-centric UX puts safety first.
3. Comments and Warnings
Alerts for important occurrences should be sent to users, including:
Warnings about low batteries
System malfunctions
Notifications of speed limits
Visual, auditory, or vibrational signals can be used to deliver these warnings.
4. Personalization
Enabling consumers to customize settings enhances the user experience in general. Individual preferences are accommodated by features like energy-saving modes and acceleration sensitivity.
5. Examining Users
Finding usability problems and potential improvement areas is aided by iterative testing with actual users. Feedback collection guarantees that the UI/UX lives up to user expectations.
6. Integration of Multiple Platforms
UI/UX design should be uniform across all platforms, including mobile apps and in-car displays, for a smooth experience.
7. Information and Analysis

User Interface and User Experience Significance in eMobility controls
One cannot stress the importance of UI/UX in eMobility. User perception, safety, and general satisfaction are all impacted by a well-designed interface and experience. UI/UX is important in eMobility controls for the following main reasons:
1. Acceptance by Users
A User Interface and User Experience UI/UX that is easy to use promotes adoption by making eMobility solutions fun and easy to use. Electric vehicles are becoming more and more popular due to their simplicity and convenience of usage.
2. Improvement of Safety
Inadequate UI/UX design can increase the risk of accidents by causing user errors and diversions. These hazards are reduced, and a safer driving experience is guaranteed by thoughtful design.
3. Efficiency in Operations
Users can operate cars more quickly because of an easy interface, which speeds up access to important features like navigation and speed control.
4. Increased User Contentment
Customer satisfaction is increased by a smooth user experience, which also promotes favorable word-of-mouth recommendations and repeat business.
5. A Lower Learning Curve
A well-designed User Interface and User Experience (UI/UX) facilitates the seamless transition of new users from conventional gasoline-powered automobiles to eMobility systems, lowering hesitancy and boosting acceptance rates.
6. Improved Image of the Brand
A company’s dedication to user-centric innovation is shown in its high-quality UI/UX design, which builds consumer loyalty and trust.
7. Inclusivity and Accessibility
Ensuring that eMobility goods are accessible to all users, including those with impairments, fosters inclusivity and broadens their market reach.
8. Improvements Driven by Data
Manufacturers can improve the usability of their designs by using the useful data that well-designed user interface and user experience (UI/UX) systems can gather on user interactions.
Problems and Limitations of UI/UX in eMobility Control Systems
Notwithstanding its advantages, eMobility’s UI/UX design has several issues that must be resolved:
1. Complexity of Technology
It gets harder to create a straightforward user interface for intricate features as EVs and eMobility systems develop. Users may become confused by cluttered interfaces and an abundance of information.
2. Excessive engineering
Excessive feature additions can irritate consumers and make navigation challenging. Finding a balance between utility and simplicity is crucial.
3. Expensive development
A substantial investment in software development, user testing, and design is required to create a successful UI/UX, which could raise product costs.
4. Problems with Compatibility
Cross-platform interoperability is an issue since different eMobility devices may run on different hardware configurations and operating systems.
5. Barriers to Access
It takes more resources and adherence to accessibility guidelines to make sure that UI/UX designs accommodate users with disabilities.
6. Difficulties with Localization
Multilingual and culturally sensitive user interfaces and user experiences (UI/UX) demand a great deal of study and design adjustments.
7. User Resistance to Change
Customers who are used to conventional gasoline-powered cars could be reluctant to move to eMobility solutions. UI/UX simplification can facilitate this shift.
8. Adherence to Regulations

Conclusion
The success and uptake of eMobility solutions are largely dependent on the user interface (UI) and user experience (UX). A well-designed user interface and user experience (UI/UX) can increase overall satisfaction, promote user acceptance, and improve safety. A smooth and user-friendly experience can be achieved by tackling issues like complexity, cost, and compatibility through deliberate design and ongoing user feedback.
When creating the user interface and user experience UI/UX for eMobility controls, manufacturers should put efficiency, accessibility, and clarity first. Refining the user experience requires investments in data analytics, user testing, and regulatory compliance. Furthermore, to guarantee safe interactions with eMobility systems, cybersecurity precautions shouldn’t be disregarded.
In the end, eMobility’s future rests on balancing user-centered design with technological breakthroughs. The industry can hasten the adoption of electric mobility and make everyone’s transportation experience more sustainable, accessible, and pleasurable by concentrating on user demands, preferences, and safety.
With a focus on fast-charging VCUs, CAN displays, CAN keypads, and EV software services, Dorleco provides state-of-the-art automotive solutions. We provide products that enable smooth eMobility experiences with an emphasis on innovation, efficiency, and dependability. For top-notch technology, outstanding performance, and unmatched service, rely on Dorleco. Join us in driving the future!
#**UserInterface**#**UserExperience**#Dorleco#CANKeypads#CANDisplays#VCUs#Vehiclecontrolunit#EVSoftwareServices#E/Earchitectures
0 notes
Text
Role of embedded systems in VCU design
Introduction to VCU design

Modern automotive Vehicle Control Units (VCUs) rely heavily on embedded technologies to improve vehicle design, performance, and functionality. A VCU is a vital component that controls the engine, transmission, brakes, and other vehicle functions. Embedded systems make major contributions to the operation of VCUs by integrating sensors, processing data, managing power, assuring safety, and simplifying software updates.
This blog delves at the different facets of embedded systems in VCU design, highlighting their benefits, problems, and implications for modern automobile technology.
Key Contributions of Embedded Systems to VCU Design

1. Integration of sensors
Embedded systems in VCUs collect and process data from a variety of sensors, including accelerometers, gyros, wheel speed sensors, and engine sensors. These sensors give real-time data, allowing the VCU to make accurate judgments about vehicle operations.
2. Data Management and Control.
A VCU’s embedded processors examine incoming sensor data and make real-time judgments. This includes altering engine settings, managing transmission shifts, and monitoring brake systems in order to improve performance and safety.
3. Communication protocols
Modern automobiles contain numerous Electronic Control Units (ECUs) that must communicate effectively. Embedded systems manage communication protocols such as CAN (Controller Area Network), LIN (Local Interconnect Network), and FlexRay to ensure that data flows smoothly across subsystems such as the ABS, Transmission Control Unit (TCU), and Engine Control Unit.
4. Fault Detection and Diagnosis
Embedded systems allow VCUs to recognize and diagnose issues using enhanced diagnostic capabilities. They monitor automobile components, generate Diagnostic Trouble Codes (DTCs), and give personnel with precise data for effective troubleshooting and maintenance.
5. Power Management.
Efficient power distribution is critical to improving vehicle performance. Embedded systems manage power consumption, ensuring that various components receive appropriate power while consuming the least amount of energy possible. This improves the overall efficiency of hybrid and electric vehicles.
6. Functional Safety.
Automotive embedded systems follow functional safety criteria such as ISO 26262. Safety features such as redundancy, fail-safes, and real-time monitoring ensure that vital vehicle operations continue to work even when hardware or software fails.
7. Software Updates and Upgrades.
Embedded systems provide Over-the-Air (OTA) updates, which allow manufacturers to improve VCU software remotely. This capability allows for speed improvements, the inclusion of new features, and security enhancements without requiring a physical service visit.
8. Advanced Driver Assistance Systems (ADAS) Integration
VCUs work alongside Advanced Driver Assistance Systems (ADAS) to improve vehicle safety and automation. Embedded systems enable features like adaptive cruise control, lane-keeping assistance, and collision avoidance, which improve both the driving experience and security.
Benefits of Embedded Systems for VCU Design
The incorporation of embedded technologies into VCUs offers numerous advantages, improving the overall efficiency, safety, and performance of modern vehicles.
1. Real-Time Processing
Embedded systems provide high-speed real-time data processing, allowing for quick decisions on operations like engine control, braking, and stability control.
2. Optimized performance
VCUs use embedded control systems to enhance engine performance, gearbox shifts, and braking efficiency, resulting in increased fuel efficiency and vehicle responsiveness.
3. Smooth integration of complex functions
Embedded systems make it easier to integrate numerous vehicle tasks, such as ADAS and engine control, and ensure that subsystems communicate and coordinate smoothly.
4. Reduced size and weight.
The compact nature of embedded systems reduces the total size and weight of VCUs, which is critical for increasing fuel efficiency and optimizing vehicle design.
5. Energy efficiency
The power management capabilities of embedded systems improve vehicle energy efficiency, guaranteeing minimal power waste while maintaining peak performance.
4. Stability and reliability
Redundant and fault-tolerant components improve the stability and dependability of embedded VCUs, allowing vehicles to operate continuously even when components fail.
7. Advanced diagnostic capabilities.
Embedded systems enable early failure detection by continuously monitoring and generating DTCs, simplifying maintenance and decreasing downtime.
8. Adaptability and Flexibility.
Software updates and enhancements enable manufacturers to add new features and improve performance without requiring hardware changes.
9. Cost effectiveness
Although embedded systems have a high initial development cost, they save money in the long run due to lower maintenance costs, remote diagnostics, and greater vehicle efficiency.
10. Complying with Industry Standards
Embedded systems ensure compliance with industry norms such as ISO 26262, which ensures that automobiles satisfy safety and performance standards.
Challenges and Drawbacks of Embedded Systems in VCU Design

Despite their benefits, embedded systems in VCU design provide a number of obstacles for manufacturers looking to improve reliability and performance.
1. Software Complexity
The intricacy of embedded software makes it difficult to design, test, and debug. Any software issue can have a substantial influence on vehicle performance and safety.
2. Cybersecurity risks
As automobiles become more connected, the potential of cyber-attacks rises. To prevent hacking and unauthorized access, embedded systems must have strong security mechanisms in place.
3. Limited upgradeability.
While software updates are possible, hardware constraints may impede the adoption of new technologies, forcing costly hardware upgrades.
4. Rigid Design
Embedded systems are frequently developed for specialized roles, making it difficult to adapt them to new technologies or changing requirements without major changes.
5. High development and maintenance costs.
The cost of developing, testing, and maintaining embedded systems can be significant, affecting overall vehicle expenses.
6. Vendor Dependence.
Automakers frequently rely on certain component suppliers, which can lead to supply chain weaknesses and reduced flexibility.
7. Limited processing capacity.
The growing demand for AI-powered features and autonomous driving puts a pressure on embedded processors, necessitating increasingly powerful computing solutions.
8. Integration Challenges

The seamless integration of embedded systems with other electronic components in the vehicle necessitates careful control of communication protocols and compatibility.
9. Environmental constraints.
Harsh working circumstances, such as excessive temperatures and vibrations, can have an impact on embedded system durability and reliability.
10. Longer Development Cycles
Automotive embedded system development can take time due to demanding testing and certification requirements, delaying the adoption of new technology.
Conclusion
Modern Vehicle Control Units (VCUs) rely on embedded systems to improve vehicle performance, safety, and efficiency. These systems support real-time sensor data processing, smooth communication between subsystems, and enhanced diagnostics.
While embedded systems offer various benefits, including real-time decision-making, energy efficiency, and software adaptability, they also present problems such as software complexity, cybersecurity threats, and high development costs. Addressing these difficulties is critical to guaranteeing the ongoing evolution of embedded systems in VCU design.
With continual developments in automotive technology, R&D efforts are centered on increasing processing power, improving cybersecurity, and increasing flexibility to suit the industry’s changing expectations. Embedded systems in VCU design constitute a vibrant and fast expanding field that will shape the future of intelligent, connected, and efficient vehicles.
For additional information on our VCUs, CAN Keypad, CAN Display -related products and E/E Software Services , please visit our website or email [email protected].
#VCUCommunicationProtocols#**VCUdesign **#Dorleco#CANKeypads#CANDisplays#VCUs#Vehiclecontrolunit#EVSoftwareServices#E/Earchitectures
0 notes