
Statistics
We looked inside some of the posts by leflanchecpastorblog-blog and here's what we found interesting.
Average Info
Notes Per Post
0
Likes Per Post
0
Reblog Per Post
0
Reply Per Post
0
Time Between Posts
5 days
Number of Posts By Type
Text
16
Video
1
Last Seen Tumblr Blogs





Fun Fact
25% of US internet users with an annual income of $80-100K use Tumblr.
Text
Séance du 12/02/2018
Prévisions : Terminer la limite de courant mettre à plat notre schéma pour pouvoir ensuite attaquer Eagle.
Réalisation : On a remplacé Rd par une résistance de 1k et notre potentiomètre de 5kohms.
Notre limite de courant fonctionne et le moteur se coupe à partir de 1A.
Nous attaquons la partie Eagle.
Prévisions futures : Continuer Eagle.
0 notes
Text
Séance du 06/02/2018
Prévisions : Continuer sur la limite de courant
Réalisation : On veut que le moteur doit se couper à un ampérage de 2A.
Il faut faire attention au signe de la tension aux bornes de Rshunt. Ainsi, on prend un voltmètre et on visualise la tension positive à ces bornes.
On a eu un problème sur la bascule RS. En effet Vs se bloque mais le moteur ne se coupe pas et le transistor ne réagit pas.
Prévisions futures : Terminer la limite de courant et attaquer Eagle.
0 notes
Text
Séance du 01/02/2018
Prévisions : Réaliser la limite de courant.
Réalisé : Mettre une seule résistance Rshunt pour qu’il y ait plus de courant dans le moteur.
Prévisions futures : Limite de courant.
0 notes
Text
Séance du 21/12/2017
Durant cette séance, on souhaite relier la partie de l’optocoupleur à la bascule RS, puis relier tout le montage ensemble.
On a alors relié la sortie de l’optocouleur (la tension Vs1 sur la patte 5) à la bascule, et le montage marche parfaitement. Quand le courant dépasse une certaine valeur, la patte 13 de la bascule RS passe à +15V, lorsqu’on remet le courant à 0A, la patte 13 est toujours à 15V, et quand on appui sur le bouton poussoir, celle-ci passe bien à 0V.
Ainsi, lorsque le courant augmente trop, un signal passe de 0 à 15V, cette tension doit pouvoir couper le système. On place alors un transistor (avec un 2N222) pour que le système soit coupé lorsque le signal est de 15V.
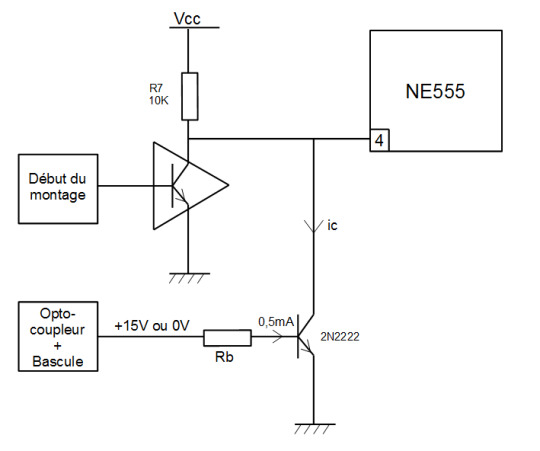
On a R7=10Kohm, donc ic=15/10K=1.5mA.
Donc iB=2*(1.5m/100)=3*10^-5 A.
Rb=15/0.5mA=30Kohm.
Nous avons alors branché la totalité du montage, avec un moteur, le pont à Thyristor, etc.. Nous devrons alors créer une surintensité dans le moteur en le bloquant avec des pinces, et tester la limitation de courant.
On remarque alors que la résistance Rshunt surchauffe. Pour baisser celle-ci, on en branche une deuxième en parallèle, ce qui divise le courant par deux, qui ne doit pas dépasser 2.5A pour ne pas endommager le moteur et le montage.
Aussi, pour bien réguler le courant, on remplace la résistance R1 du montage de l’optocouleur par un potentiomètre et une résistance Rd de 270ohm.
On obtient alors ce montage :
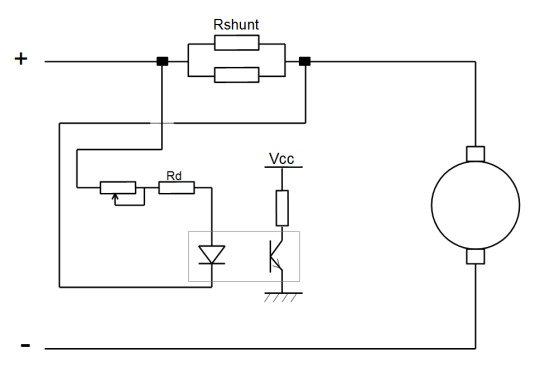
La limitation de courant ne fonctionnant pas encore, nous allons dans la prochaine séance prendre une résistance Rshunt de 10W qui résistera mieux à la puissance du moteur, et baisser Rd pour rendre l’optocouleur plus sensible. Cela va augmenter le courant et couper le moteur plus rapidement.
0 notes
Text
Séance du 19/12/2017
Durant cette séance, nous devions mettre en place la bascule RS.
En effet, lors d’une surintensité dans le moteur, le système se coupe, mais si on coupe le système, le courant va baisser en dessous de la valeur acceptable. Ainsi, la limite de courant va laisser le système redémarrer et être stoppé à nouveau puisque le problème causant la surintensité n’aura pas été réglé. On met donc en place une bascule RS pour que lors de la coupure du système, celui-ci ne puisse redémarrer qu’après appui sur un bouton poussoir. La bascule utilisée sera le 4044N.

On a tout d’abord branché la bascule comme suit, en utilisant R0 (patte 4), S0 (patte 3) et Q0 (patte 13). On relie le Set à 0 puis à 15V pour symboliser la limite de courant, et on constate que le montage ne fonctionne pas. (Pour le bon fonctionnement du 4044N, on met la patte 16 à 15V et la patte 8 à la masse, et on place une résistance de 15Kohm sur le Reset).

On teste ensuite le montage ci-dessous, qui fonctionne parfaitement.

En effet lorsque le Set est à 0 (quand on lui envoie 0V), la sortie Q0 passe à 1. Celle-ci ne passe à 0 que lorsque le Set est à 1, et qu’après appui sur le bouton poussoir.
0 notes
Text
Séance du 14/12/2017
A partir de cette séance, nous allons commencer un nouvel objectif donné par le cahier des charges : la création d’une limite de courant. Ainsi, si le courant dans le moteur augmente au delà d’une certaine valeur, suite à un dysfonctionnement par exemple, la limite de courant devra couper le système, qui ne pourra redémarrer que lorsque le courant sera redevenu normal, mais aussi lors de l’appui par l’utilisateur sur un bouton poussoir.
Tout d’abord, nous avons réalisé le schéma ci-contre à l’aide d’un opto-coupleur :

Dans ce montage, la résistance R1 va régler le courant dans la diode D0. Plus ce courant est élevé, plus la diode brille et envoie de la lumière au transistor T. Plus T reçoit de la lumière, plus il devient passant. Pour avoir un courant élevé, on choisit une valeur faible pour R1.
Pour commencer, on va remplacer la résistance de shunt Rsh par une simple alimentation que l’on fera varier entre 1 et 4V. Pour calculer R1, on prends en compte la chute de tension dans la diode de 1V, et ainsi pour une tension d’entrée de 4V et si on souhaite un courant de 10mA, on a R1= 3 / 10m. En prenant une valeur normalisée, on a une résistance R1 de 330ohm. On choisit ensuite une résistance R2 bien plus élevé, on choisir 5.4Kohm.
On remarque alors que le signal Vs1 descend jusqu’à 0V lorsque l’alimentation passe de 0 à 2V.
On rajoute maintenant Rshunt, à la fois reliée à notre montage, à la charge qui sera plus tard notre moteur, et à une alimentation entre 0 et 4V qui sera plus tard notre pont à Thyristor.
On prends une résistance de 3.3ohm et ainsi, quand on envoie 0.1V on a 0.3A. Pour le moindre courant on a alors une bonne tension dans la charge. (Attention toutefois à ne pas dépasser 0.7A, sous peine de détruire la charge)
Pour ajuster la baisse de tension on baisse R1 et on augmente R2, à respectivement 270ohm et 6.8Kohm.
Ainsi, lorsque le courant atteint 0.3A, la tension Vs1 passe de 15V à 0V. On règle alors notre charge, le rhéostat ici, pour que ce courant corresponde à une tension d’entrée de 4V.
Au delà de cette tension et donc de ce courant, le système se coupera et lui enverra 0V.
0 notes
Text
Séance du 7/12/2017
.
Au cours de cette séance, nous allons tester notre montage que je vais vous rappeler par la suite, sans l’alimentation +15V.

La puissance est déconnectée de la masse de la commande. On va s’assurer que le thyristor passe.
Pour l’instant on envoie pas d’impulsions, donc il devrait rien avoir en sortie.
Si on envoie une petite impulsion, le thyristor passe donc nous avons une tension.
Pour bloquer le thyristor il faut qu’il n’y ait plus de courant.
Nous avons testé les thyristors l’un après l’autre, l’un avec +30V et un autre avec -30V.
Ensuite, on a testé avec les deux thyristors en rajoutant 2 résistances. Comme nous pouvons le voir sur le schéma ci-dessous :

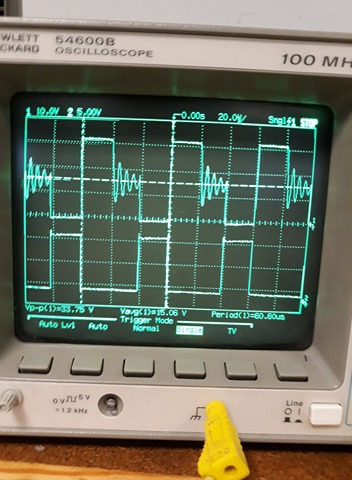
Nous avons donc le signal suivant :

Dans la partie où TH1 passe, TH2 a une tension V<0 à ses bornes. Ainsi TH2 ne réagit pas.
Å l’inverse dans la partie de TH2, TH1 ne réagit pas.
Nous avons utilisé une sonde isolatrice ( elle permet de couper la masse ) pour pouvoir observer le signal de puissance qui varie entre 0 et Vmax.
Nous prenons ensuite un moteur que nous allons brancher d’un coté du Pont de Thyristor et d’un autre côté à une self qui permet de lisser le courant ( voir schéma ci-contre ) . Voir vidéo
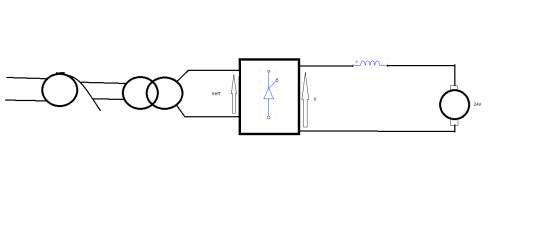
Attention !! Veff ne doit jamais dépasser 26V car Veff = (pi*Vmoy)/2*racine2) = 26.65V
L’inductance permet de lisser le courant.
Nous utilisons un voltmètre que nous branchons à la sortie du transformateur et à l’entrée du Pont de Thyristor. Il va nous servir à surveiller la tenson Veff.
Le moteur tourne et on constate que lorsque l’on fait varier le potentiomètre la vitesse varie aussi.
On va maintenant visualiser la tension en sortie du pont de Thyristor.
Nous obtenons ainsi le signal suivant :

La partie du signal entourée en rouge est le “psy”. Nous le réglons grâce au potentiomètre qui gère aussi la vitesse du moteur. Et le “psy” décide du reatrd de Vred.
Pour ce qui est de la partie entourée en violet, c’est la self qui permet de lisser le courant.
Et enfin, le troisième palier entouré en orange est la tension Vred.
Si Vred < E alors i = 0 car il est impossible pour le courant de faire ceci :

Ainsi pas de courant tant que Vred<E.
Durant cette séance nous avons finis notre objectif qui était de finaliser la mise en route de notre montage et de pouvoir faire tourner le moteur en faisant varier sa vitesse en fonction du potentiomètre. Et enfin, de bien comprendre la signification du signal obtenue au final.
Prochaine séance : Attaquer le limitateur de courant
0 notes
Text
Séance du 5/12/2017
Durant cette séance nous devons terminer le transformateur d’impulsion. Nous avons le schéma suivant :
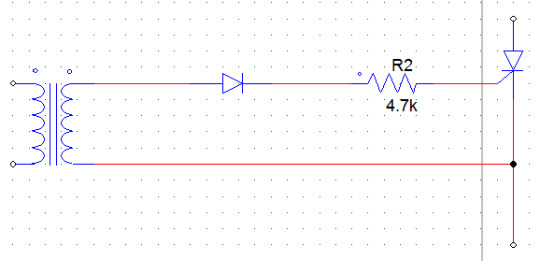
Le courant circulant dans la gâchette doit être égale à 10mA, ainsi nous prenons R2 = 4,7kohms.
Remarque : Plus la résistance est petite, plus le transistor va se bloquer longtemps.
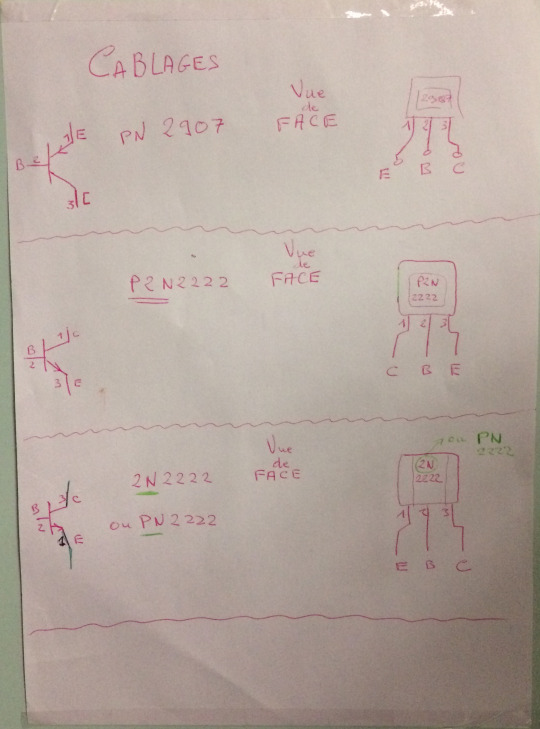
On choisi le transistor PN2222. Attention il y a deux types de transistors, comme nous pouvons le voir sur la photo ci-contre, nous avons le P2N2222 et le PN2222.
Avant toute chose nous vérifions que l’on a bien T = 60us sur la patte 3 de l’oscillateur.
Nous avons mis en place sur la partie gauche de la LABDEC le schéma avec le transformateur d’impulsion.
Nous avons bien le signal suivant :
Pour la suite des test nous avons mis une sonde en sortie du TI en mettant la patte 1 de sortie à la masse. Nous obtenons ainsi le +15V, -15V, 0V.
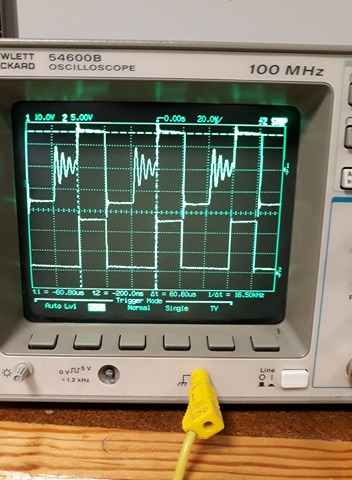
Lorsque nous avons -15V, c’est la démagnétisation des diodes et nous avons 0V au primaire et au secondaire.
Ensuite, nous testons les thyristors avec une alimentation de +15V à la place du montage. Nous avons le schéma suivant :
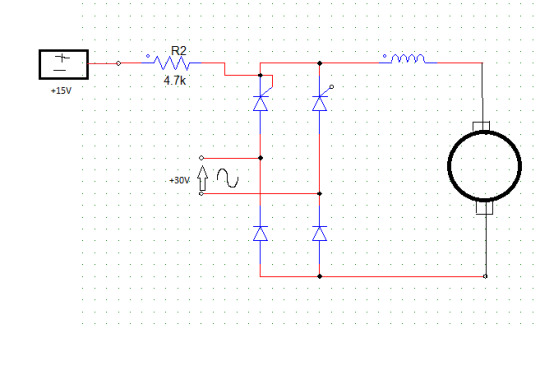
On a bien environ +30V en sortie de la charge ( rhéostat = moteur ). On remarque qu’il suffit d’une petite impulsion pour pouvoir déclencher le thyristor.
Ainsi durant cette séance nous avons testé à la fin un pont à thyristor avec une alimentation de +15V et de +30V.
Durant la prochaine séance nous allons testé ce schéma sans l’alimentation de +15V et faire fonctionner le moteur.
0 notes
Text
Séance 30/11/2017
Lors de la séance précédente, nous avons choisit le TI 245 comme transformateur d'impulsion. Afin de ne jamais lui envoyer de longues impulsions, on utilise un NE555 pour transformer celles-ci en une multitude de courtes impulsions.
Le NE555 se câble comme ceci :
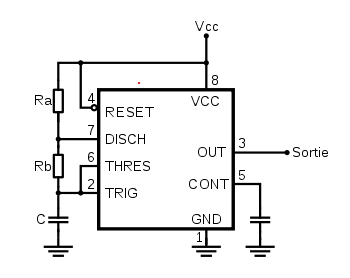
D'après la documentation, le rapport cyclique du signal sera de (Ra+Rb)/(Ra+2Rb). On a vu plus tôt qu'on souhaite un rapport cyclique de 1/3, chose impossible à réaliser d'après l'équation précédente. On place alors une diode en parallèle de Rb qui, lorsqu'elle sera passante, court-circuitera Rb.
On sait aussi que f=1,44/(Ra+2Rb)xC. Dans ces conditions, on a un temps à l'état bas de Tb=0,693xRbxC, et au lieu d'avoir un temps à l'état haut de Th=0,693x(Ra+Rb)xC, on a Th=0,693xRaxC. Ici 0,693 correspond à 1/1,44.
On a alors Rb=Th/(0,693xC) avec Th=20us et C=1nF. On a aussi Ra=Tb/(0,693xC). On choisit des valeurs de E12 ce qui nous donne Ra=56kohm et Rb=27kohm.
On branche alors Ra et Rb, ainsi que le condensateur de 1nF et on met un condensateur de 10nF à la patte 5. La patte 4 donne l'autorisation de fonctionnement, lorsqu'elle est alimentée le NE555 fait osciller la tension. On relie d'abord la patte 4 à la patte 8 donc à Vcc, on obtient bien une oscillation de Th=20us et un rapport cyclique de 1/3 sur nos 15V d'entrée. On débranche ensuite la patte 4 de la patte 8 et on met notre signal de commande sur la patte 4. On a alors bien une multitude d'oscillation à la place des temps hauts de notre signal carré :

On remarque que nos impulsions sont parasitées, l'oscillateur est ici pollueur, on met alors un condensateur de 100nF entre la patte 1 et 8 pour enlever les perturbations et ne prendre que les pics de tension. On a ainsi ce signal final à envoyer sur le Transformateur à Impulsion :

Le transformateur à impulsion permet d’isoler la partie commande de la partie puissance, sans pour autant modifier le signal de commande. Nous le brancherons comme ceci :

La self représente le magnétisme du transformateur, elle se charge en courant donc on place une diode dite "de roue libre" pour décharger ce courant. Sinon ce courant risque de se décharger beaucoup plus vite qu'il ne se charge et de détruire le TI. En effet le produit L x di/dt serait trop grand :

On veut une pente de 15V/L à la montée et de -15V/L à la descente.

On place alors une diode en parallèle de la self, donnant une descente de -0,7/L, ce qui est toujours trop lent. On ajoute alors une diode Zener nous donnant -15,7/L avec ce montage :

Ensuite, la résistance R1 doit saturer le transistor, or Ic=50mA, donc iB=2×Ic/B iB=100mA/100=1mA. Avec une tension de 15V on a donc R1=15kohm.
On obtiendra alors cette tension :
Ainsi entre C et A on aura :
Tout ce montage sera alors branché et testé dans la prochaine séance.
0 notes
Text
Séance du 28/11/2017
Lors de la séance précédente nous avons obtenu un signal en dent de scie ainsi qu'un signal continu variable de 0 à 10V. Le premier objectif de cette séance est de comparer ces deux signaux à l'aide donc d'un comparateur, le LM311, qui se branche toujours comme suit :
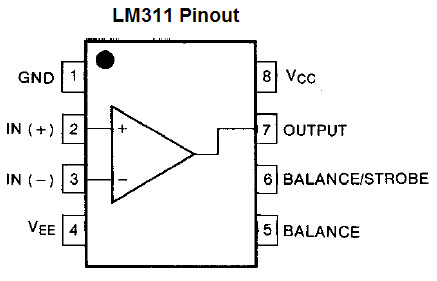
On met alors la dent de scie sur la patte 2 et le signal continu sur la patte 3, les pattes 1 et 4 à la masse et on met une résistance de 15kohm entre la sortie et l'alimentation et on relie Vcc à nos 15V.
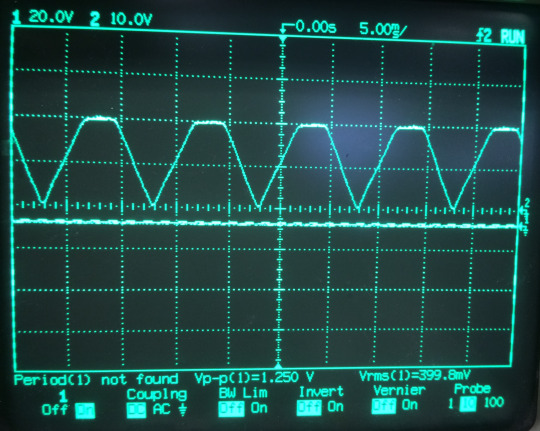
On peut voir ici les deux signaux qu'on veut comparer :

Une fois comparés, il nous fournissent un signal carré au rapport cyclique variable. En effet, lorsque la valeur du signal continu change, le rapport cyclique du signal change aussi. On obtient alors un signal carré comme celui-ci :

La comparaison marche donc parfaitement, le signal en résultant servira alors de signal de commande. Cependant, on ne peut pas simplement envoyer ce faible signal à la partie puissance, nous attaquons donc une nouvelle partie : le Transformateur à Impulsion.
Celui-ci n'a qu'un défaut, il ne doit pas recevoir d'impulsion trop longue, sinon il prendra celle-ci pour un signal continu ce qui risque de le saturer et de le détruire. On doit alors transformer nos impulsions en une multitude de courtes impulsions, d'une durée précise.
Afin de calculer cette durée, nous savons d'après la documentation que les Thyristors choisis précédemment pour la partie Puissance ont besoin d'un courant de gâchette de 0,2A pour s'amorcer. Nous choisissons donc le Transformateur d'impulsion TI 245, qui peut fournir ce courant Ig. D'après le constructeur, ce transformateur a un produit V x t de 500Vus. Ainsi pour Vcc=15V on a T=500u/15=33us. On choisit alors qu'à l'état haut, les impulsions seront de 20us. On aura alors une période de 60us et un rapport cyclique de 1/3.
Dans la prochaine séance, on utilisera alors un NE555 pour créer une multitude d'impulsions de 20us à partir d'une plus longue impulsion.
0 notes
Text
Séance du 23/11/2017
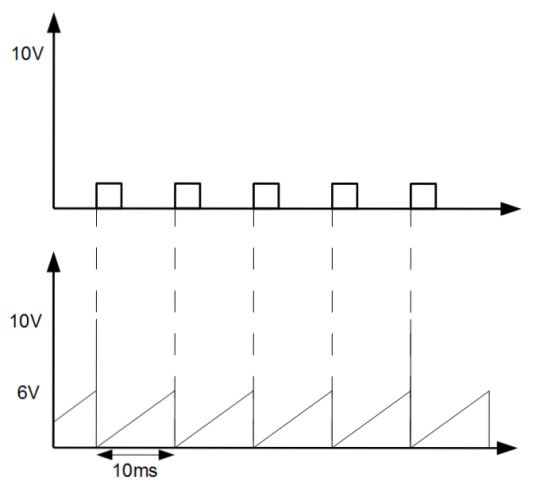
Nous souhaitons obtenir comme ci-dessous une impulsion de 10V d’amplitude, de faible rapport cyclique et de période de 10ms à partir du signal sinusoïdal redressé, afin d’obtenir ensuite une dent de scie et 10V et de période 10ms.

Cependant, lorsque nous relions les deux montages établis précédemment (le premier créant des impulsions comme un GBF et le second transformant les impulsions en dent de scie), on remarque deux problèmes :
L’amplitude de l’impulsion chute brutalement
La dent de scie a une amplitude beaucoup trop faible
1. Le premier problème s’explique simplement. En effet lorsque les deux montages sont reliés, le point où on mesurait l’impulsion s’est vu relié à la deuxième partie du montage, soit tout d’abord le transistor T2, dont l’émetteur est à la masse. Ainsi lorsque le montage est alimenté, on ne mesure plus une impulsion de 10V, mais une impulsion beaucoup faible, la tension Vbe=0.7V entrant en jeu. Ce n’est donc pas là un vrai problème étant donné que l’impulsion de 10V est bel et bien délivrée à la suite du montage, même si on la visualise moins simplement.
2. Le second problème était en plusieurs parties. Il provenait tout d’abord du rapport cyclique de l’impulsion. Celle-ci étant beaucoup trop grande, une inversion de la patte + et - du LM311 régla ce premier point.
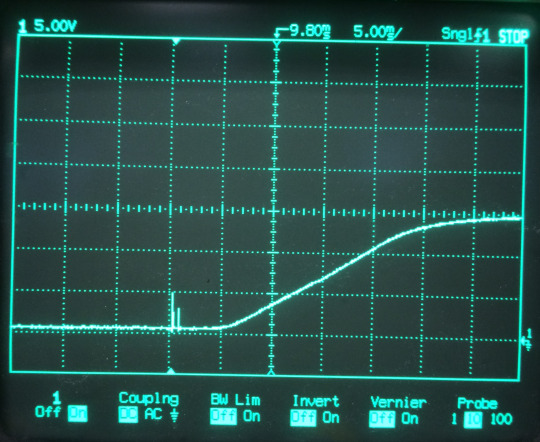
A présent, on remarque que la dent de scie monte trop vite, elle atteint sa valeur maximale rapidement et ensuite n’évolue plus. Les changements de cablage et de composants pendant les séances précédentes nous on obligé à revoir notre montage et la valeur de ses composants. On a alors remplacé le condensateur relié au collecteur du 2N2907. Précédemment de 1uF on lui réattribue la valeur de 10uF, conformément aux calculs effectués et aux proposition du professeur durant la séance du 13/11/2017.
La dent de scie réagit alors bien, avec la bonne période, mais atteint seulement une valeur de 6V, et non 10V. On en conclue donc qu’avec ce condensateur, la dent de scie monte trop lentement et n’a alors pas le temps d’atteindre les 10V. On en conclue que le condensateur se charge trop lentement, le courant au sein de celui-ci est alors trop faible : Il faut abaisser la valeur de R3 pour augmenter le courant dans C. On choisit alors R3 = 330ohm.
On obtient bien une dent de scie de 10V et de période 10ms à partir d’une impulsion d’amplitude et de période identique.

Cette partie étant terminée, on passe à l’étape suivante. La dent de scie doit être comparée avec une tension continue variable, soit la commande manuelle de vitesse. On opte donc pour le montage ci-dessous, dont le potentiomètre fera varier la tension continue entre 0 et 10V.

Pour calculer R nous avons procédé comme suit, en partant d’un potentiomètre de 1ohm pour faciliter les calculs :
10=1/(1+R)*Vcc
10/15=1/(1+R)
2/3=1/(1+R)
3/2=1+R
3/2-1=R
R=0.5
Ainsi en choisissant ici un potentiomètre de 10Kohm, la résistance devra être de 5Kohm, en valeur normalisée on choisit 4,7Kohm.
On obtient bien un signal continu variable avec le potentiomètre entre 0 et 10V (voir vidéo).
Objectif de la prochaine scéance : Comparer la tension continue avec la dent de scie.
0 notes
Text
Séance du 20/11/2017
On doit durant cette séance terminer le redressement et attaquer la partie du comparateur.
Ainsi on rappelle le schéma que l’on va utiliser :

Pour le moment sur notre LABDEC R5 n’y est pas. On utilise seulement R6.
Ainsi nous allons placer la sonde avant la résistance R6. On y observe alors le redressement :
On a un signal de 20.
Maintenant nous allons ajouter la résistance R5 pour pouvoir faire un pont diviseur qui passe de 20V à 12V.
Calcul de R5 : 12 = R6/(R5+R6)*Vcc => R6/(R5+R6) = 3/5
Si on prend R6 = 47kohms et R5 = 33kohms on a bien un rapport qui est de 3/5 soit 0.6 => 47/(47+33) = 0.58
En mettant ces valeurs de résistances, on a bien une amplitude de +12V.
En théorique, on voulait avoir une valeur de +12V pour ne pas griller le comparateur car celui-çi est alimenté en +15V.
En pratique, on a bien une amplitude de +12V :

On a terminé avec le redressement, on va passer au comparateur.
Premièrement nous choisissons le LM 311 :

Attention la patte 4 doit être à la masse !
On a Vcc = +15V et I = 1mA. On prend R7 = Vcc/1 = 15kohms.
R7 est une résistance placée entre OUTPUT et Vcc car le comparateur est à collecteur ouvert.
On doit fabriquer une tension constante réglable de 0 à 3V. Ainsi on utilise un potentiomètre de 20K.
On a çi-contre un pont diviseur :

Calcul de R : 0-3V = 20K/(20K+R)*15 => (0-3V)/15 = 20K/(20K+R)
20K+R = 15*20K/(0-3V) => R = (15*20K)/(0-3V) => R8 = 82kohms
On place sur la LABDEC le potentiomètre. On remarque ainsi que le signal varie entre 0 et 3V. Nous pouvons le voir sur la vidéo sur un nouveau billet.
Problèmes : La partie Dent de Scie marche, la partie “Réseau” aussi. Mais lorsque l’on relie les deux parties rien ne se passe.
0 notes
Video
tumblr
Séance du 20/11/2017. Signal évoluant de 0 à 3V
0 notes
Text
Séance du 16/11/2017
On va terminer la dent de Scie.
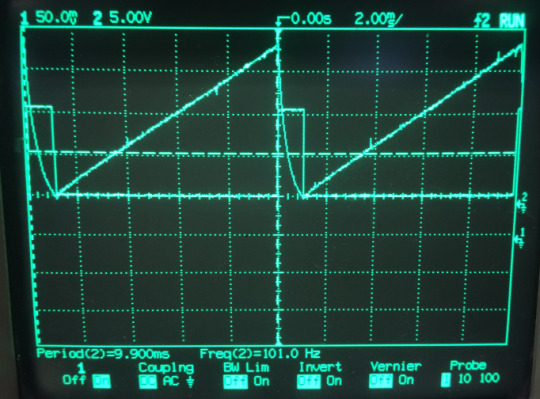
Précédemment on a R4 = 29 ohms. On remarque sur le signal ci-dessus un arrondi sur la décharge. Pour résoudre ce problème, on va remplacer R4 par une résistance encore plus petite. Ainsi on test avec R4 = 3 ohms.

Nous remarquons un “plat” sur le signal de la Dent de Scie. Ce qui est normal car pendant une impulsion le condensateur se décharge.
On a ensuite remplacé le condensateur de 10uF par un condensateur de 1uF. On fait cela car la dent de Scie se charge trop vite et donc ne monte pas à +10V
On va ensuite augmenter R pour que le courant I diminue. On choisit R = 680 ohms.
Mais problème, le signal monte trop vite.
Solution : On va mettre un potentiomètre de 1K en série avec R3 = 470 ohms

On a enfin notre Dent de Scie.
Ensuite nous passons à l’étape suivante. C’est à dire que l’on veut remplacer le GBF par le réseau donc un transformateur.

On va brancher le transformateur au pont de Diodes.
On doit ainsi avoir le résultat suivant :

A chaque impulsion, on doit retomber à zéro.
On va calculer la valeur de la résistance R6 : 20V crête à crête => R = 30/20*10^-3 = 1500 ohms => R6 = 1.5kohms
On va tester notre schéma sans la résistance R5 mais unique avec la résistance R6.
Problèmes rencontrés : Un des fusibles du transo est mort. On a du le remplacer par un fusible de 1A
Pour la prochaine séance : Terminer le redressement et commencer la partie du comparateur
0 notes
Text
Séance du 13/11/2017
Après avoir terminé la partie Puissance. On va passer à la Partie Commande avec pour première étape, la création d’un signal en Dent de Scie. En effet, nous allons commencer par créer la charge de la Dent de Scie.
Nous avons donc le schéma suivant :

Nous avons donc un pont diviseur. Celui-ci va nous servir à calculer les valeurs des résistances.
V1 = cste = R2/(R1+R2)*Vcc
IR3 = VR3/R3
On a VR3 = Vcc - (V1 + Vbe ) => VR3 = 15 - 10.7 => VR3 = 4.3V
On veut que la Dent de Scie se charge jusqu’à 10V pendant 10ms.

On a donc : Ic = C dV/dt = 10u * (10V/10m) IR3 = 1mA
R3 = VR3/IR3 = 4.3/0.01 = 430 ohms => On prend 470 ohms car 430 ohms n’existe pas. On a donc R3 = 470 ohms
Calcul de R1 et R2 : V1 = R2/(R1 + R2) * Vcc avec V1 = 10V et Vcc = 15V
R1/(R1+R2) = 2/3 => On choisit R1 = 18kohms et R2 = 39kohms
Nous pouvons maintenant visualiser le début de notre Dent de Scie.
Remarque : On met l’oscilloscope en mode Single car le condensateur se charge trop vite. Grâce à ce mode on peut bien visualiser le signal.
Nous avons donc la charge de notre Dent de Scie, nous pouvons donc nous concentrer sur la décharge de celle-ci.
Nous avons le schéma suivant :
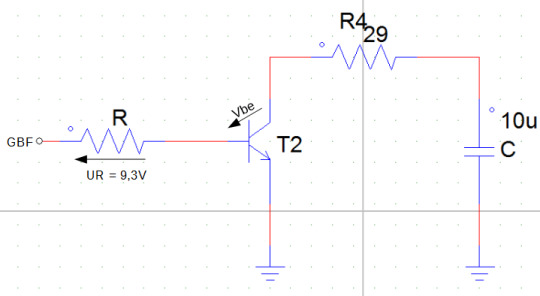
Calculs : UR = 10 - 0.7 = 9.3V
R = 9.3kohms => R = U/I = 9.3/1*10^-3
On prend R4 = 29 ohms car on nous demande une résistance faible.
Bilan de la séance : Nous avons rencontrés des problèmes comme par exemple, le condensateur était déjà chargé donc on a utilisé une résistance pour pouvoir la décharger.
Ce que l’on a réalisé : Nous avons au cours de cette séance débuté la création d’un signal en Dent de Scie. En effet, nous avons réalisé la charge de celle-ci.
Ce qui est prévu à la séance suivante : Finaliser la Dent de Scie et commencer l’étape suivante qui est de remplacer notre GBF par le réseau, c’est à dire un transformateur.
0 notes
Text
Séance du 09/11/17
Attentes : Dimensionnement des Thyristors et des diodes. Début de réalisation sur LABDEC.
Réalisations : Nous avons déterminés les thyristors en fonction de Imoy et VTh. Nous avons comme contrainte que le thyristor doit pouvoir supporter Vmax (Uentrée)

Voici ci-dessus le schéma d’un pont de Thyristors. Avec V = 230V et I = 8A

Ensuite nous avons le signal ci-dessus représentant le courant Ith1 en fonction du temps.Grâce aux informations présentes sur ce signal nous pouvons calculer Ieff = racinecarré(0.5)*8 = 5.6A
Iavg >= 4A
Ieff>= 5.6A
VDRM>= 230*racinecarré(2) avec DRM = Direct Repetitive Max
VRRM>=230*racinecarré(2) avec RRM = Return Repetitive Max
Ainsi grâce à toutes ces informations, nous avons pu déterminer le dimensionnement des Thyristors :

Ainsi nous avons choisi le TIC 116D.
Pour finir, nous devons dimensionner les diodes. Nous nous aidons des documentations techniques mises à notre disposition.

Ainsi nous avons choisi la diode GI754.
VRRM = 400V
IF (AV) = 6A
Prévisions : Débuter la réalisation sur LABDEC
0 notes
Text
Séance du 26/10/17
Attentes : Réalisation des schémas fonctionnels d’ordre 1 et 2. Dimensionnement des Thyristors.
Réalisation : Réalisation des schémas fonctionnels d’ordre 1 et 2. Commencement du dimensionnement des Thyristors
Prévisions : Finir le dimensionnement des Thyristors et des diodes. Commencer la réalisation sur LABDEC.
0 notes