
Don't wanna be here? Send us removal request.
Statistics
We looked inside some of the posts by rei-sakura and here's what we found interesting.
Average Info
Notes Per Post
0
Likes Per Post
0
Reblog Per Post
0
Reply Per Post
0
Time Between Posts
10 days
Number of Posts By Type
Photo
12
Last Seen Tumblr Blogs





Fun Fact
Tumblr posted its first advertisements in May 2012 and subsequently earned $13M in revenue.
Photo

FabNow Final
最終課題は バウハウスの講師または学生の中から1人選び、現代にに蘇ったら作るであろうものを作る というものである。
バウハウスは1919年に設立されたので、現代というのはその100年後である2019年を想定している。
最終課題は今までの課題とは違い、約4週間かけて作品を作った。
【人物の選定】
まずはじめに人を選ぶ。
バウハウスの人の作品をひたすら調べていると、作品が心に留まったデザイナーがいた。 ジョージ・ネルソン(George Nelson)という人である。


クリックで作品の画像検索ページへ
この人はアメリカのデザイナーで、同時に建築家・編集者でもある。 ハーマンミラー社という家具メーカーのデザイン部長を務め、チャールズ・イームズ, レイ・イームズ夫妻や、イサム・ノグチ, エーロ・サーリネンらをデザイナーとして起用した。
代表作にはMarshmallow SofaやBall Clockがある。

この人にするぞと心に決めて調査を進めていたのだが、よくよく調べてみるとバウハウス出身の人ではないことが発覚した。
そこで、WikipediaのBauhaus alumniやBauhaus teachersのページを見て、片っ端から名前で検索をかけていく。 しかし、ジョージ・ネルソン以上にやりたいと思える人に出会えない。
年代が同じ, バウハウス出身者と関わりが深い, 意匠性の高い作品を多く残している などの理由から浅野さんに相談し、田中先生の許可が出たのでジョージ・ネルソンで進めることにした。
【スケッチ・案出し①】
最初の週は
① storyweavingを読む ② 選んだ人物のデザイン言語を調べ上げ、自らのものとして吸収するために最低30枚スケッチをする(30枚のうち後半は最終制作の案出し)
という課題が出た。
私はネルソンの時計が気に入ったので、時計を中心に作品のスケッチを行った。 →スケッチはこちら
これを元にアイディアを出すのだが、課題についてごちゃごちゃと考えすぎてよくわからなくなってきたので、
・FabNowの最終回として、今まで学んだ知識や技術を活用したり、再挑戦したい課題に取り組んだりする ・現代の技術を用いてその人の作品を改造してみる
という方針でアイディアを出した。 →アイディアのスケッチはこちら
結果的にこれらの案はすべてボツになってしまった。 デザイン言語の調査が足りていなかったので、ジョージ・ネルソンを調べ直すところから再スタート。
【案出し②】
ネルソンについてもう一度ちゃんと調べてみた。 ネルソンの時計に心惹かれたわけだが、やはりネルソンの作品の中でも時計はすごかった。 イスや机などのリプロダクト品はいろいろなデザイナーの作品がリプロダクトされているが、時計のリプロダクト品はほとんどがジョージ・ネルソンのものであった。
では、なぜ彼は時計を作ったのか。
まず前提として、彼は世界をどのように見るのかを真剣に考えた人だった。 当時にしては珍しいことに常にかさばるカメラを持ち運び、目に留まったものを絶えず記録していた。 “How to See”という本も書いており、そこで彼は「人々に視覚的なリテラシーがない」と述べている。 文字や数字よりも図形的な視覚情報を好んだということも書かれている。
そして「デザイナーというものは本質的には芸術家である」と述べ、日常の中に芸術を取り込もうとしたという。
つまり、世界をある視点で切り取ったときに、その中に芸術を入れたかったということである。
これが彼が掛け時計と置き時計を作っているが腕時計を作っていない理由であろうと思われる。 腕時計は自分の腕につけて���まうため、世界とそれを切り取る主体とに二分したとき、腕時計は主体と完全に別にはなれないのである。
では彼にとっての芸術は何かというと、キュビズムである。 彼はピカソをとても愛していたそうで、事象を単純な図形の組み合わせに落とし込んだり、マッシブな部分と細いパイプとの対比を取り入れたり、といったデザインに現れている。
また、彼は時間によって変化する時計の影も緻密に計算してデザインしていた。 ここにも腕時計を作らなかった理由が見える。腕時計は固定されていないので、時間によって影が変化しない。
以上を踏まえると、彼は現代においても
・日常の中に芸術を取り入れる ・その日常はある視点で切り取ることのできる、主体から切り離されたものである ・芸術はキュビズムを美学とし、視覚的なものである ・その形は時間ともに変化する
という姿勢でものづくりを行うであろうと考えられる。
これらに当てはまるのはやはり時計であるが、彼が現代でも時計を作るか、ということを考え直してみた。
現代において、時刻はスマホやPCで確認する人が多く、家に掛け時計や置き時計がないという人もいる。 つまり、掛け時計や置き時計によって視覚的に時刻を認識する必要性が100年前よりも弱まっているといえる。
そこで時計の本質を考えると、そもそも時刻を知ろうとするのは、何かしらの予定があり、それに合わせて行動がしたいからである。 よって、正確な時刻を伝えることをスマホやPCが担っている現代においては、アナログ時計が伝えるべきは、次の予定までの時間的距離感なのではないだろうか。
以上のことから、単純な図形を組み合わせて、視覚的に次の予定までの間隔を掴むことのできるフィジカルなリマインダー のようなものを作ることにした。
形の変化のさせ方として、2次元的な変化と3次元的な変化が考えられ、できれば3次元をやりたかったが、機構がどうしても思いつかず時間もなかったので平面で行うことにした。
>> 次へ
Final Week:2018.07.03 ~ 08.01
0 notes
Photo

FabNow11
今週はFabNurse。 課題はFabNurseの超ニーズドリブン・超マルチプレイヤー・超漸進的・超パーソナライズドなファブリケーションを体験しようというもの。
具体的には、事例として挙げられている患者の生活を改善するためにできることを考える。 事例:https://docs.google.com/document/d/1yZGi9AFQQkFOtcHzC3-ThsG_NQeAY5lUcsdYPCnCyKU/edit?usp=sharing
スケジュールは以下の通り。
6/26(火) プチWS & 解決する課題の方針を決める 6/29(金) 18:00までに最初のプロトタイプ提出 6/30(土) 12:00までにFabNurseチームがフィードバック 7/03(火) 製作物と説明シートを用意して発表
【解決したい課題】
私が目指すのは、片麻痺の状態でも趣味を楽しめるようにすることである。
この人は脳梗塞で右上下肢が麻痺してしまっているが、左半身だけでも使ってできることはやりたいはずである。 そうやって何かをしないと、ボケてしまって認知症も併発してしまう恐れもある。
片手でも料理をできるようにしたり、本を読めるようにしたり、文字を書いたたり絵を描いたりできるようにしたり、といった自助具は多く見受けられた。 これらをデジタルファブリケーションで改善することも考えたのだが、割と考えられていたので、まだ作られていないものを作ることにした。
作られていないものとして私が作りたいのは、左手でもカメラのシャッターを押せるようにするツールである。
カメラのシャッターボタンは基本的に右側についていて、左手だけで持った場合はシャッターを押すことができない。 カメラの上下を逆さまにしても写真は撮れるが、持ちづらくうまくいかない。 そこで左側にリモートシャッターを取り付けるパーツを作ることで、左手だけでも(一脚などは使ったほうがよいかもしれないが)写真を撮ることができるようになる。
写真は被写体を探したり、人を撮る場合はコミュニケーションをとったりと、さまざまな効用のある趣味である。 この患者さんが趣味だったかはわからないが、趣味だったということにしたい。 そうでなくても新しく始めてもよいかもしれない。
ちなみに本に関しては私自身読書が好きで、怪我をしたときや病気で寝ているときなど、片麻痺でなくてもサポートツールを必要とするときがあるので、ゆくゆく作ってみたいなと思う。 また、新聞も片手で読むのが難しくなんとかしたかったのだが、折りたたむこととめくることの機構が難しくいい案が浮かばなかったので、今回はやめた。いずれ考えて挑戦してみたい。
【プロトタイプ】
まずは紙粘土で大まかにプロトタイプを作った。
リモートシャッターを持っていないのだが、想定としては下のようなものである。

赤で囲った部分がリモートシャッターが入る部分。 青丸のところが親指でボタンを押す部分となる。

前には手で持ちやすいように、右手側と同じようにグリップを作る。 3Dスキャンしたらより手にフィットするものが作れるかもしれない。

上にはストラップを通す穴を開ける。

【フィードバックを受けて】
プロトタイプに対し、先輩方から貴重なフィードバックをいただいた。 https://docs.google.com/document/d/1nt-jxE7nPwv9IvSC0konYdw8hYIYXYfTV_WAR-eJWR4/edit
浅野さんが教えてくださったOLYMPUS AIRが個人的にとても感動的だった。 これならパーソナルファブリケーションのよさを活かしていろいろな人のニーズに対応することができる。 しかし残念ながら生産終了しており、値段的にも時間的にもすぐには手に入れられないので、今回のFabNowで使うことは断念。 ものすごく好きな取り組みなので、生産終了してしまっているが、今後この方面は深めて再活性化させたい。
先輩方の意見を参考に、 この患者さんはカメラが趣味で、愛用のカメラをまた使いたい という設定にすることにした。
模擬的にその愛用のカメラはLUMIX GX1であるとして作業を進める。
また、左手だけで保持し撮影するのは難しいと思われるが、大きな三脚や一脚は使うのが大変だし、ベッドまたは車椅子に固定してしまうと、どちらかでしか写真が撮れない。 そこで、ゴリラポッドというフレキシブルな三脚をカメラに取り付けることで、好きなところで安定して撮影できるようにすることにした。 車椅子上では胸に当てて安定させることを想定している。
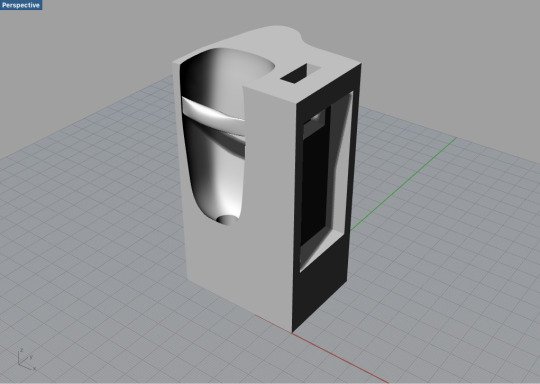
【製作】
プロトタイプをもとに3Dモデルの作成に入る。
リモートシャッターを購入したので、まずどの向きで入れるのがいいのかを検討する。


2枚目の持ち方のほうが持ちやすく、ボタンも押しやすい。 ケーブルを通すのも下のほうが都合がいいので、2枚目の向きでリモートシャッターを固定することにする。
改めて紙粘土でプロトタイプ2号を作成。
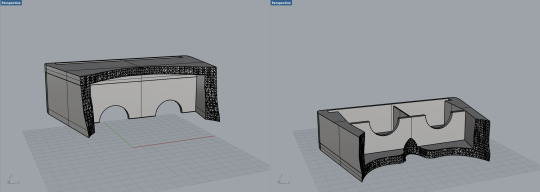
それをもとにモデリングをする。大まかな形はこんな感じ。

手に乗る部分を手にフィットするように丸みをつけたいが、作り始める前にきちんと全体像を考えずに作り始めてしまったので、この状態から丸めるのがとても難しい。
後から曲面の部分をくっつけようとしたが、うまくいかない。

結果、時間的にもブーリアンしてしまった作業データ的にもやり直すことはできず、このまま諦めて角があるままにした。
さらにリモートシャッターを固定するバーを作り忘れたことに気づき、後から追加。 切り取ったオブジェクトがあればよかったが、それもないのでなんとなくでつけるがうまくいかない。
最終的な妥協案が以下。これで完成とする。 せっかく紙粘土を使ったのだから、もっとモデリングの手順も詰めてから作業に入ればよかった。

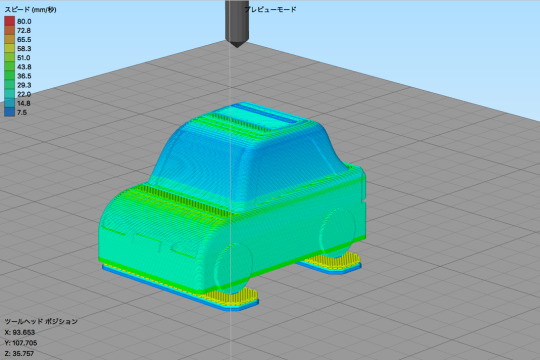
続いて出力。 Simplifyで8時間半と出てびっくりして、実際に10時間以上かかってさらにびっくりしたけれど完成。

隙間に滑り止めシートを入れてリモートシャッターを固定。

カメラ側にも滑り止めシートを入れるが、隙間が大きすぎて全く固定されない。完全なる設計ミスである。
もう一度作り直して出力する時間的余裕はないので、とりあえずゴムバンドで固定してみる。
画面がまったく見えない。

リモートシャッターも接続できない。

巻き直し。 画面は少し隠れるけれど、左手だけで保持できた。
ゴリラポッドも装着。

これを出力物(と滑り止めシート)だけで実現させたかったけれど、今回は仕方がないのでこれで実際に写真を撮る一連の流れをやってみる。
結果、レンズカバーを外したり電源を入れたりといった作業が片手だと大変だったが、どこかに一旦置けば片手だけでも操作は可能だった。 グリップを握ってシャッターを切れたときはなかなかに感動的だった。
グリップの感想としては、角が痛い。手にフィットする丸みがほしい。 せめて角を斜めに切るだけでもすればよかったなと思った。 今回は時間的にスキャナーを使うことができなかったが、やはり3Dスキャンができるとよりよいと思った。
ポスター用写真のモデルついでに、父親にも体験してもらった。 胸にゴリラポッドを当てることで、実際に安定することがわかった。 ストラップをかけてもらうのを忘れたが、ストラップもあればより安定すると思われる。

充電や取り込みに関しては、バッテリーやSDカードの取り出しまでは片手でも可能だった。 しかしコンセントに挿したりPCを用意して作業したりといった部分は誰かの手助けが必要だなと思った。
三脚がかなり有能で、大抵の作業が三脚のおかげで左手でも可能となった。 左側にボタンが付いていればもっと楽だというのも強く感じたので、OLYMPUS AIRのようなカメラがやはり理想的だと思う。
この患者さんが外出ができなくなっても、ベッド��机の端にカメラを置いておいて、窓の外の景色を撮るだけでもできたらいいなと思う。 そうして1日の中での変化や日々の変化を見つけることで、単調なベッドの上での生活を少しでも楽しめるようになってほしい。
今回私の設計が甘く完璧に実装できず、課題だらけの作品となってしまったが、実際の生活における問題点を探して改善する、という作業がすごく実践的で楽しかった。 左手での操作が可能なカメラは、ある一定数のニーズが常にあるのに、絶対数の問題で大量生産の商品に対応してもらえない。 そうした少数のニーズに対応して生活の質をあげることができる、ということこそがパーソナルファブリケーションのよさであると思う。
Week11:2018.06.26 ~ 07.02
0 notes
Photo

FabNow10
今週のテーマは4Dプリンティング。 課題は動きをもつ造形物を作ること。 制約は ①モーターは使わない ②自律的な動きを最低一つもたせる ③どこかに必ず3Dプリンタを使う である。
私は磁力で揺れる卵を作った。
4Dプリンティングの研究事例を見ていて、磁力によって変化するものが興味深かった。 特殊なフィラメントを使ってみたかったが作業可能日がほぼないので、今週の作品は初期段階ということでPLAで作ることにした。
初期案は卵の中に円形にコイルをつけ、その中を電池を走らせることで起き上がり小法師的な卵を揺らすというものだった。
まずは銅線でコイルを作る。 磁石を介して電気が流れないといけないので、エナメル線ではなく銅線を使う。 磁石にギリギリ接するくらいのØ12mm程度で作成。

続いて電池に磁石を装着。 単5を使いたいがまずは実験として単4を使用。 両端の磁石は反発する方向につける。

これをコイルの中に通す。

結果、少し走ったが、一瞬で電池の容量がなくなってしまった。 これではぐるぐるさせ続けることは不可能である。
そこで電池を動かすことを諦めて、電池は固定してコイルを動かすことにした。
まずここで卵を出力する。 底面の曲面が緩やかすぎたのか、サポート材が生成されない。

その結果どうしても途中で剥がれてしまうので、剥がれてしまうところまでを蓋として、それより上を再び出力した。
上の部分はサポート材が生成された。

今度はエナメル線でコイルを作成し、電池ボックスを組み立て、出力した下の部分とくっつける。

エナメル線の端っこはやすりがけをしている。 去年の理工の実験でコイルを作ったときの思い出が蘇る作業。
これに上部分を被せて完成。 卵の上部分は下の方にボンドを入れて下を重くした。

作り終わってから思ったが、これだと電磁石を単に磁石として使っているだけあので、永久磁石を取り付けるのと何も変わらない。コイルを巻いた意味がない。 卵の振動で電磁石がオンオフされるような仕組みにすれば、より面白い動きをさせられただろう。
また、モーターを使わないという制約から無理やり磁石で動かした形となってしまったが、原理としてはモーターも電磁石なので、グレーゾーンかギリギリアウトかもしれない。 振動を制御するならモーターを使ったほうがよいと思う。
ただ、今後の展望としては、磁石や導線もプリントすることで、より自由度の高い磁力や電力で動くものが作れるのではないかと思う。 今回は時間がなかったので単なる前段階の作品となってしまった上に物も卵という面白みのないものになってしまったが、磁石や導線のプリントはやってみたい。
Week10:2018.06.19 ~ 06.25
0 notes
Photo

FabNow9
今週はモルキャス。 課題は、アウラ、一回性、モノコック、部分と全体、ディテールなどを念頭に置きながら、モルキャスを用いて、デジタルファブリケーション機材のみでは作れないものを製作してくることである。
私は透明なレジンの中に3Dプリンターで出力した骨格を入れて標本模型を作ることを目指した。
意識したのは徳重さんの部分と全体のお話と、静佳さんの複合材料のお話である。 全体としては外見の模型だけれど、よく見ることで骨などの内部を知ることができる。またはその逆で、ぱっと見では骨格標本だが、近づくことで外皮のディテールや骨との関係などを理解できるかもしれない。どのようなものになるのかは作ってみてのお楽しみである。 また、デジタルファブリケーション機材のみではできない点が、ある材料の中に別の材料のものを入れる、ということがある。そこでレジンの中にPLAを入れることにした。
本当は恐竜などの全身骨格で作りたかったのだが、時間がないので人間の頭部を作ることにする。
まずは型を取るための頭部を3Dプリンターで出力する。 X軸のモータードライバが壊れていたというアクシデントが発生したが、これを機にモータードライバを交換して静かに快適に使えるようになった。 ���ータードライバ交換の詳細は後述する。
無事出力できた頭部。

あとは手順通り進める。枠を組み立てて油粘土で下半分を作り、

上からよく攪拌したシリコンを流し込む。

固まったら粘土を綺麗に取り

もう一度枠に入れてシリコンを流し込む。

ここであれだけ静佳さんが忠告してくださったにも関わらず、離型剤を塗ることを失念。 2回に分けた作業の意味もなくシリコンの塊が完成した。
仕方がないのでカッターで分割する。 ここで半分ではなく首元だけ切るなどとすればよかったが、頭が悪かった。

この中にレジンを流し込み、3Dプリンターで出力した頭蓋骨を入れて固める。
頭蓋骨は一発で出したら歯が少し取れた。


火曜の朝の段階でレジンが固まっておらず開けたら流れ出したため、もう一度流して固めているところ。
柔らかいシリコンだったので、分割しなくてもよかったかなと思った。 必ず一度は失敗するとも言われていたが時間がなかったので、時間があるときに骨格も複雑にして再挑戦したい。
6.25 追記 レジンが悪かったのか、配合を確認して再挑戦したものを約1週間放置してもまったく固まらなかった。 これ以上ウッドデッキを汚すと怒られてしまうので、仕方なく諦めることにした。 型を取るところから始めてレジンも別のものを使って再挑戦がしたい。
<モータードライバの交換>
3DプリンターのエクストルーダーがX軸方向にだけ全く動かなくなってしまったので、モータードライバを取り替えた。 脇本さんにものすごく手伝っていただきました。ありがとうございました。
3Dプリンターを倒して底面の蓋を開けると、このようになっている。

左上部分の拡大。赤く囲った部分がモータードライバ。 上から順にX, Y, Z, Eとなっている。 なぜかエクストルーダーのコネクタが挿さっていないことが発覚したが、動いているので今回はそこは置いておく。

コネクタを挿し替えるなどで確かめた結果、X軸のモータードライバが壊れていることがわかった。 いい機会ということでY軸のモータードライバも一緒にいいものに交換した。

青と白のものが新しいモータードライバ。 コネクタはピンの爪を押して導線を抜き、上下を入れ替えた。 ファームウェアを書き換えてもいいそうだが、コネクタを逆にするほうが私には楽だと思った。
モータードライバを交換した結果、XY方向への移動音が��てつもなく静かになった。Z軸とエクストルーダーも替えたいくらいに感動的。
Week9:2018.06.12 ~ 06.18
0 notes
Photo

FabNow8
今回の課題は「3D プリンタを制御して面白い使い方をする」。 3D モデルをスライスするのは禁止である。
1人1台貸していただいたBIQU-Magicianを改造する。
私はプリンターにペンを取り付けて、文字を書けるようにした。
はじめハックについての説明を受けたときは、3Dプリンターとリアルタイムでコミュニケーションが取れるというのがとても面白いと思い、やりたかった。 しかしPCとBIQUを繋いでみても、なぜかポートが認識されない。


Bluetoothのポートしか出てこない。
家のプリンターとは繋ぐことができたので、ケーブルやPCのポートに問題はない模様。 Simplify3Dで1行ずつGcodeを送信するとその通りに動くことを確認できた。
このまま家のプリンターとのインターフェースを作ろうかと思ったが、そのためにはArduinoの出力ピンがわからないと私には何もできない。
家のプリンターはいじりたくないのでBIQUをオープン。

よくわからない。 本当にArduinoで動いているのだということだけは実感できた。
GUIを作るのは私には難しそうなので、仕方なくインタラクションを諦めることにする。
ここで200℃に加熱したBIQUのエクストルーダーを触って指をやけどするという事故が発生。 大会前にこれ以上手を怪我したくない!ということで熱さずに3Dプリンターを使おうと思い、ペンをくっつける。

陳腐な発想なのでもう一捻りしたいところだが、思いつかないのでGcodeの勉強と割り切ってコードの作成に移る。 後付けではあるが、加熱せずフィラメントを出さずに動かすにはGcodeを自分で書く必要があるので、いい勉強になるということにする。
まずはペンと台との距離を調整。 テストとしてジグザグ動くコードを書いて実行。
vimeo
いい感じ。
アルティメットのディスクに自由にかっこいい文字やロゴを描けるようになりたいので、まずはWHITE HORNSと書きたい。
ねぐせさんのBOAのコードを参考に、content変数にGcodeを追加していく。
このcontentの中身をgcodeファイルで書き出したい。 しかし、BOAの真似をしてもいろいろなエラーが出てうまくいかない。
仕方がないのでコンソールのログに書き出して、コピペするかSave asでgcodeファイルとして保存する。

調整が必要な接地距離だけ打ち込めるようになっている。 本当は書く文字列もここで取得したかったのだが、splitやcharAtを使いこなせず失敗に終わった。
1文字ずつ関数を作る。
fabrixでillustratorの文字をexportしようとしたけれど、うまくいかなかったので座標を手で書き込んで動かしていく。

ペンの上げ下げも頻繁に使うので関数化。

lasposという変数には、右上で書き終わるのか右下で書き終わるのかが格納される。 それに応じて次の文字への移動の仕方が変わり、必ず左上から始まるようになっている。

位置を相対位置で定めているので、改行の際には一旦ホームポジションに戻るようになっている。もう少し早く改行できるといい。

WHITE HORNSのGcodeを書き出して、Simplifyでプレビュー。

SDカードに入れてプリント。

Sを書くときに右下のフレームに当たってうまく書けない。
HORNSを左にずらして再挑戦。

右下に向かうときの速度がなぜか急に速くなり、うまくいかない。
そこだけ速度を落としてもう一度書いてみる。 ついでに少しだけペンを上に持ち上げた。
vimeo

なぜか速度を落としても速いまま書かれてしまった。 とりあえず現時点ではこれが限界。 もう少し速度を調節すれば綺麗に書けそう。
自分の名前も書いてみた。

今回はGcodeを学ぶことがメインテーマでありBIQUを使う課題だったので、ペンを適当に取り付けたが、実際に文字を書くロボットとして使うのであれば3Dプリンターのパーツを元にもっときちんとしたものを作れるだろう。 また、デルタ型であるBIQUはベッドが小さく高さがあるが、文字を書くにはZ軸よりもXY平面のほうが必要なので、パラレルリンクでXY平面が広いものが作れればとても使い勝手がいいと思った。
illustratorなどから書き出すことができれば、フォントを選んだり太さを変えたりロゴを描いたりできるようになると思う。
家のプリンターやBIQUではサイズの問題で出力できないが、いずれディスクを出力して、そこに好きな文字と絵を描いてみたい。
[2018.06.12時点 対応文字] W H I T E O R N S M K P A
[2018.06.18時点 対応文字] A B C D E F G H I J K L M N O P Q R S T U V W X Y Z
Week8:2018.06.05 ~ 06.11
0 notes
Photo

FabNow7
今週の課題はarduinoを使っておもちゃを作ってくること。 条件はサーボモーターを3つ以上使うことであった。
今回は課題を達成できなかったが、私は魚釣りゲームを作った。
まず、最初はクレーンゲームを作ろうと思っていた。 x軸, y軸, z軸の移動で3自由度なので、サーボモーターを3つ使うことができる。 当初の機構の案は以下。

3Dプリンターを観察して、プーリーとタイミングベルトによる移動がいいとわかったが、歯車を自分で作ってみたかったので、ラックとピニオンで移動の仕組みを考えた。
ただのクレーンゲームでは面白くないので、自分が小さい頃に大好きだった魚釣りゲームと合わせることにした。 魚釣りゲームのだいたいの案が以下。

次に、車輪として使うためにはサーボモーターを連続回転させなければならないので、サーボモーターの改造に移った。 蓋を開けて、ギアをいじる。

しかし、ギア���金属製で、ファイナルギアのストッパーを切り取ることができなかった。 金属やすりがあれば削れるが、家になかったのでここで断念。
クレーン部分の案が使えなくなってしまったので、なんとなくロボットアーム的な機構で動かすことを検討しつつ、魚部分の作業に入った。
パーツを切り出して組み立てる。


土台部分との設置面積が大きいとすれて音がうるさかったので、中央部分に薄い板を挟むことで少し浮かせた。

土台部分には魚を上下させるカムを取り付ける。 台に円を彫刻しておけばよかったと思った。

続いてぱくぱくする魚を作る。
ここでかなり試行錯誤することになり、ほぼ全ての時間をここに費やしてしまった。
釘を短く切ってシャフトを作り、蝶番を作る。


シャフトの距離感によって、口が開かなかったり、開いても蝶番が割れてしまったりして、絶妙な長さ調整が必要だった。
最初の案がこちら。

板が回るとくびれの部分に食い込んで、板が回らなくなり、最終的に魚が崩壊することがわかった。
蝶番や胴体部分のサイズを微調整し、最終的にできたのがこちら。

すぐに口が開くようにすることができた。 胴体部分は穴を開けたときの廃材で作ったので、穴より小さくなるようにやすりで削っている。
土台もつっかえることがないように、やすりで削った。


土台部分はDCモーターで回転させようと思っていたのだが、以前に先輩が改造した連続回転するサーボモーターが1つ手に入ったので、使わせていただくことにした。
このサーボモーターは逆回転ができなかったので結果的にそうやさんのモーターをお借りしたのだが、歯車と土台をつけて接続。

ここまで作ったところで時間切れとなってしまった。 サーボモーターも1つしか使っていないし、サーボモーターである意味もarduinoを使って動かす意味もない。
それにクレーンゲームと合わせることで新しいゲームとなるのに、ここだけだと既存のおもちゃを低クオリティで再現しただけとなってしまった。 魚も時間がなくて全個数作ることができなかった。
ただ、今回初めてレーザーカッターを使い、おもちゃを作ってみて、いろいろと勉強にはなったなと思う。 例えば、カムや魚は3Dプリンターで造形したほうが確実に曲面で作ることができるが、今回あえてすべて木で作ることを勝手な目標としていた。 結果的に加工時間や素材の特性など、3Dプリンターとレーザーカッター、プラスチックと木の違いを体感することができた。
また、おもちゃを作ってみて、安全性に配慮するのは大変だということもわかった。 釘を切って作ったシャフトの部分は先が尖っていて手に当たると痛い。 ギア部分がむき出しなので、そこに指をはさむ可能性もある。
今回は作業時間が短かったが、今度時間があるときにもっといろいろと作ってみたい。
Week7:2018.05.29 ~ 06.04
0 notes
Photo

FabNow6
今週の課題は
Rhinocerosの今までにない面白いコマンドを作ってくる。
である。
まずコーディングによって3Dモデリングをすることのメリットを考えると、 ・乱数を使用することができる→自然現象の再現, 機械にしか思いつかないような形 ・繰り返しなどの構文を使える→手作業の面倒さの軽減 ということが思いつく。
ここから、ランダムで雪の結晶を生成するコマンドを作ろうと思ったのだが、ただ面白いだけで終わってしまうので、もう少し実用性を持たせたかった。 そこで、結合の種類や元素を入力すると、結晶格子の3Dデータが生成されるコマンドを作ることにした。
【RhinocerosとAtomの接続】
まずはAtomでrhino-pythonを導入し、RhinocerosとAtomを接続する。 しかしこの接続部分がなかなかうまくいかなかった。
Rhinoceros側で
Listening for Atom editor requests on port 8080...
となっている状態でテストコードを実行しようとしても、
Rhino isn't listening for requests
というエラーメッセージが出てしまう。 繰り返しStartAtomEditorListenerを実行すると、
This instance of Rhino is already listening for Atom editor requests. No action taken.
という文面が表示される。 Atomのrhino-pythonのPort Numberも0808となっているが、なぜか繋がらない。
そこでRhinoでSetAtomEditorListnerPortコマンドにより65000に変更し、AtomのPort Numberも65000に変更してみたところ、接続できた。 具体的な原因となぜ65000なら大丈夫だったのかはよくわからないが、一応これにより繋ぐことができた。
【コードの作成】
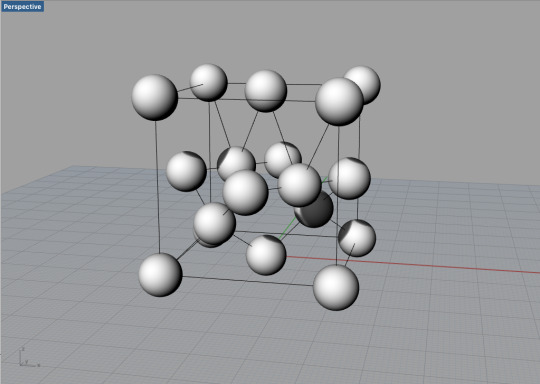
接続に成功したのでコーディングにうつる。 金属結合, 共有結合, イオン結合について作成する。
まずは金属結合から。 金属結合は体心立方格子(bcc), 面心立方格子(fcc), 六方最密構造(hcp)の3��ターンを用意する。
体心立方格子を生成するプログラムは以下の通り。

頂点は p =[] で宣言した後、.appendで要素を追加していこうとしたのだが、
Message: attribute 'append' of 'list' object is read-only
というエラーメッセージが出てしまったので、初期化することにした。 中心を原点にすれば書き出す必要もなかったかもしれないが、y座標が正の位置に生成したかったので、8点は書き出した。
これを実行すると体心立方格子が生成される。

続いて面心立方格子。

体心立方格子と基本的には同じ。 結合の手をfor文1行だけで作れるように、面上の点の順番を工夫した。

最後に六方最密構造。 単位格子ではなく、わかりやすい六角柱の結晶格子を生成する。

12点書き出すのは面倒なので、x座標とy座標を書き出してから代入した。
p = [] と宣言したところ
Message: index out of range: 0
というエラーメッセージが出たので、12個値を入れた状態で宣言をした。 Cのように宣言時に要素数を指定できないのが不便だと思った。

今度はこれらを元素に応じて呼び出す関数を定義する。
呼び出す関数(ここではBCC(), FCC(), HCP())がこの関数よりも上の行で定義されていないと、
Message: name '関数名’ is not defined
となって呼び出すことができない。これもすごく不便だ感じた。

代表的な元素が登録されたデータベースとなっていて、元素名を入れれば結晶格子が生成される。 鉄は変態するが、常温で体心立方格子なのでbccに登録しておいた。
登録されていない元素の場合は構造を聞く。 bcc, fcc, hcp以外の構造は”Not Supported”と表示される。
同様にして、イオン結合結晶と共有結合結晶についてもコーディングする。 やっていることは同じなのでコードは割愛する。
イオン結合結晶は塩化ナトリウム型と塩化セシウム型を生成できる。硫化亜鉛型などは非対応。 陽イオン半径は陰イオン半径より小さくなっている。


共有結合結晶は元素を聞かずにダイヤモンド型を生成する。
元素を聞いてCやSiO2以外は分子で表示する機能もつけたら便利だったかもしれない。
あとは結合の種類を聞いて、各関数を呼び出すようにしたら完成。
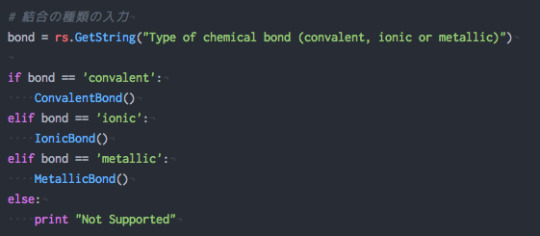
改良の余地としては、各元素や化合物の、原子半径や単位格子の1辺の長さもデータベースに加えれば、さらに正確な結晶格子を表示するようにできる。 実際、塩化セシウム型の単位格子は塩化ナトリウム型の単位格子よりも小さいが、このコマンドでははじめは同じ大きさで生成される。 また共有結合に関して、結晶以外も構造を3Dモデルで表示できるようにすることもできる。 原子の種類によって色を変えるようにしてもさらにわかりやすくなるだろう。
化学構造を3Dで見ることができるサービスはいくつかあるが、自分のパソコン内で生成されて編集できるというのが、このコマンドのいいところだと思う。 単位格子を増やして隣接部分の確認をしたり、原子を追加して水素吸蔵合金などを作ったりできる。 またいろいろな化合物を作れるようになったら、原子を変更して新しい化合物を考える際のツールとしても使用できるかもしれない。
Week6:2018.05.22 ~ 05.28
0 notes
Photo

FabNow5
今週の課題は
(1) : 研究室ウェブサイト用の自分の3Dデータをスキャン等で用意してくる (2) : “「スキャン技術」の創造的な使い方”をひとつ開拓する
である。
【自分の3Dデータの用意】
Senseを使って3Dスキャンを行なった。 はじめはSenseを定点にして、撮られる自分が回る椅子に座って1回転するという方法をとった。
1回目にZにあった回転椅子でスキャンをしたところ、背もたれが入ってしまい背中もうまく撮れなかった。

背もたれのない回転椅子がZで見つけられなかったので、今度は背もたれのない椅子で脚を使って回転してみたが、軸が一定の状態で回転するのは至難の技だった。

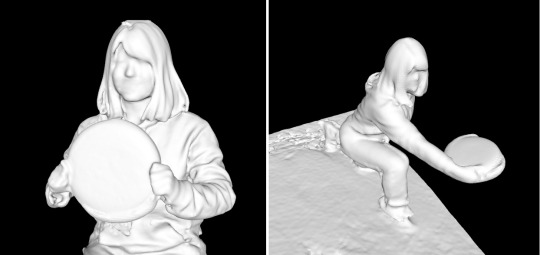
そこで自分が回転するのではなく、座っている��りをSenseを持って一周してもらうことにした。 この方法が一番綺麗に撮ることができた。
頭の上を撮るときにLost trackingすることが多かった。 単位時間あたりの移動距離が大きいとLost trackingするのかと思っていたがそういうわけでもなく、どんなときに発生するのかはよくわからなかった。
スキャンしたデータの穴を埋めて、余分なオブジェクトを切り取り、stlとobjで出力。 結果的にはstlデータのみを使用した。
スキャンが楽しかったのでアルティメットのディスクとも撮ってみた。
ウェブサイト用にしようかと思ったデータ(左)とバックインサイを踏み込んで投げるの図(右)
研究室のウェブサイト用には、メッシュ数を落とし、肩から上の部分だけにする。
MeshlabのFilters→Remeshing, Simplification and Reconstruction→Simplification: Quadric Edge Collapse Decimationでメッシュ数を5000に削減。 いきなり5000にするのではなく、少しずつ5000に減らした。
メッシュ数を減らしたデータをstlで書き出し、Rhinocerosで下部を切り取り。 底面も埋めたかったのでTrimではなくMeshBooleanDiffernceを使った。

一応2パターン用意しておいた。
【スキャン技術の活用】
CTスキャンをしてみたかったがNUに行くことができなかったので、Senseの活用方法を考えた。
スキャナーによって実物からデータを取り込むことは、その物体を自分でモデリングすることができない場合にメリットとなる。 そこでモデリングできないものとして体を選び、体にぴったりと合うものを作ることにした。
自分の経験から、競泳用のゴーグルやアルティメット用のサングラスなどが個人個人の顔にぴったりと合ったらいいだろうな、ということが最初に思いついた。 海外メーカーのものはデザインがかっこいいけれど日本人の顔には合わない、ということがよくあるからである。
その路線で調べていたところ、VRゴーグルで3Dスキャンした顔のデータに合わせたものは作られていないらしいことがわかった。 VRゴーグルと顔との隙間が小さく光が入らないほど、没入感が得られVR体験の質は高まる。
ということで顔にぴったりと合うVRゴーグルを作ることにする。
まずはSenseで顔をスキャン。
次にレンズを調達する。 ダイソーのミニルーペを1つ購入。文房具ではなく老眼鏡のコーナーに置いてある。

このルーペを分解してレンズを取り出す。 1つのルーペに2枚のレンズが入っている。

そしてスキャンした顔のデータとレンズのサイズをもとに、VRゴーグルのモデリングを行う。
失敗をたくさんしたので、ダイジェストで紹介する。
失敗①
iPhoneを入れる部分にThingiverseからダウンロードしたデータを使ってしまった。

ダウンロードしたstlデータをpolysurfaceに変換して編集したのだが、フィレット部分など扱いが面倒で加工しづらかった。
Thingiverseはダウンロードしてそのまま出力する分には楽だが、編集するのには全く向いていないことがよくわかった。
失敗②
顔のデータに曲線を当てて面を作り、切り取ろうとしてしまった。


顔の3Dデータをソリッドだと思ったまま作業をしてしまった。 この方法だと面倒な上にTrimやJoinがうまくいかない。
この他にも大量に失敗を犯したが、書き切れないので大きな失敗として上記の2つをあげておく。
結局iPhoneを入れる部分も含めてすべて自分でモデリングした。
レンズの部分は目の位置に球を目印としてつくり、その点をもとに穴を開けた。


顔に当たる部分は顔のスキャンデータをそのまま使って切り取り、スキャンデータを貼り付けた。


振り返ってみればすごく簡単な作業だった。
上面にはiPhoneを入れる用の穴を開ける。

レンズの穴と上面がうまく出ないと思うので、上半分と下半分に分けて出力する。
まずは下半分から出力。
いつものPLAのパラメーターで、
インフィル:10% 基本レイヤー層:0.3mm アウトライン:2 上面のレイヤー:4 底面のレイヤー:4
として、ラフトを
ベースレイヤー:2 トップレイヤー;3
で出力した。

ラフトの取り外しが大変だった。 アナログで地道な作業。

ニッパーが一番早く綺麗に取れることがわかった。
何度もニッパーが手に刺さりそうになって選手生命が危ぶまれたが、なんとかすべて除去することに成功。 このあとやすりがけをした。

取り外しをベースレイヤーのみにしようと思い、上半分は
ラフトトップレイヤー:1 上面のソリッドレイヤー:2 底部のソリッドレイヤー:3
に変更。
また、下半分を出してみて、レンズの穴が少し小さいことが発覚。
iPhoneを入れる部分もカバー付きだと少しきついので、上半分はレンズ穴とiPhone穴を少し大きくした。

結局トップレイヤーが一部剥がれてしまいあまり綺麗にはならなかったが、除去作業は下半分よりはほんの少しだけ楽だった。 上半分も下半分と同様にやすりがけ。

最後にレンズをはめて上半分と下半分を接着。

片方のレンズがあまり綺麗ではなく、少し見栄えが悪くなってしまった。 レンズが2枚入っているとはいえ、ルーペを2つ買って綺麗なレンズを2枚用意すればよかった。
最後にiPhoneを入れ、VRの映像を再生して覗いてみる。 顔に当たる部分はきちんとフィットした。 しかし映像は左右がうまく重ならず、あまり立体的にならなかった。レンズとiPhoneの距離が悪いのかもしれない。
今回は作業できる日が少��かったので、作り直す時間がなくここまでで終了。 手で持つ部分も手にぴったりとフィットするようにする、というアイディアもあったので、いずれその点も含めていろいろと改善して作り直したい。
VR体験に成功しなかったのは悔しいけれど、自分の顔にぴったりと合うものが手軽に作れることがわかって楽しかった。 自分が求めているジャストサイズのものが作れるところがパーソナルファブリケーションの醍醐味なので、この分野は今後も深めていきたい。
Week5:2018.05.08 ~ 05.14
0 notes
Photo

FabNow4
今週の課題は 素材の特性をわかりやすく比較できるようなモデルを作成し、それを複数のフィラメントで出力し実際に比較してみる。 であり、目的はマテリアルの特性を知ることである。
ただ比較しても面白くないので、私はテーマを「自動車」として比較することにした。 自動車は身近な製品であり、いろいろな素材が使われているからである。
そこで今回のサブテーマとして、 ・自動車の素材は適材適所に使われているのか ・3Dプリンターで自動車を作る場合の最適なフィラメントは何か を設定し、調査を行うこととした。
【下調べ】
まず、自動車に使われている材料を調べた。
自動車において、鉄鋼、アルミ、プラスチックが三代材料と言われている。 ボディーは主に鋼板、タイヤはゴムに配合剤としてカーボンブラックやシリカ、硫黄などが使われている。 他にもアルミや亜鉛などの金属、セラミックスなどさまざまな材料が使われている。
この情報をもとに今回選んだフィラメントは以下の7種類。
①PLAフィラメント(CCTREE) ②鋼系フィラメント『SteelFill』(colorFab) ③アルミ系フィラメント『ExcelFil TECH:アルミ』(Voltivo) ④木質系フィラメント『EasyWood パイン』(FormFutura) ⑤カーボン系フィラメント『CarbonFil』(FormFutura) ⑥TPUフィラメント(SainSmart) ⑦PC素材フィラメント『PC-Plus:透明』(Polymaker)
PLAは3Dプリンターに付属のもの、TPUは田中研のものを使い、残りは3DFSで購入した。
順に説明する。
①PLAフィラメント(CCTREE)
フィラメント径:1.75mm 素材:PLA 直径公差:0.05ミリメートル± エクストルーダー温度(メーカー推奨値):190��210℃ ヒートベッド温度(メーカー推奨値):60〜80℃
ABSと並んでもっとも一般的なフィラメント。 polylactic acid(ポリ乳酸)の頭文字を取ってPLAと呼ばれる。 トウモロコシやジャガイモなどのデンプンから得た乳酸を重合させて作るため、石油由来のABS樹脂よりも環境に優しいとされる。廃棄後は土に埋めて二酸化炭素と水に分解することもできる。
②鋼系フィラメント『SteelFill』(colorFab)
フィラメント径:1.75mm 素材: PLA / PHA + 微鋼粉末 直径公差:0.05ミリメートル± エクストルーダー温度(メーカー推奨値):190~210℃ プリント速度(メーカー推奨値):40〜80mm/S ヒートベッド温度(メーカー推奨値):50~60℃
PLAに鋼の粉末を混ぜ合わせた金属系フィラメント。 プリント直後はマットな質感だが、研磨処理により金属光沢を得られる。 colorFab社は他にも金属系のフィラメントとして、銅, 青銅, 真鍮系のフィラメントも販売している。
鋼は、一般に自動車のボディーに使われている。
③アルミ系フィラメント『ExcelFil TECH:アルミ』(Voltivo)
フィラメント径:1.75mm 素材:30%Metal & Polymer Binder Flexible: 90% TPE 直径公差:0.03ミリメートル± エクストルーダー温度(メーカー推奨値):200~206℃ ヒートベッド温度(メーカー推奨値):40℃
これはVoltivo社の金属系フィラメント。Voltivo社も青銅系フィラメントも販売している。 TPE樹脂にアルミ粉末が30%配合されており、研磨しなくても光沢が出る。
アルミニウムは、アルミニウム合金としてさまざまな部品に使われている。 軽量だが強度の観点からボディーにはあまり使われない。
④木質系フィラメント『EasyWood パイン』(FormFutura)
フィラメント径:1.75mm 素材: 40%粉砕木材粒子 直径公差:±0.05mm エクストルーダー温度(メーカー推奨値):200~240℃ プリント速度(メーカー推奨値):40〜100mm/S ヒートベッド温度(メーカー推奨値):35~60℃
パインの木材粉末が配合されたフィラメント。 FormFutura社の木質系フィラメントは他に、ココナッツ, 黒檀, バーチ, シダー, オリーブがある。
イギリスのメーカーのモーガンは今でも木製の車を作っている。
⑤カーボン系フィラメント『CarbonFil』(FormFutura)
フィラメント径:1.75mm 素材: CarbonFilブレンド 直径公差:0.05ミリメートル± エクストルーダー温度(メーカー推奨値):240~265℃ プリント速度(メーカー推奨値):PLAと同様 ヒートベッド温度(メーカー推奨値):85℃
木質系フィラメントと同じく、FormFurura社のフィラメント。 炭素繊維と、ビスフェノールAから作られたFormFutura社のHDgrass化合物が配合されている。
⑥TPUフィラメント(SainSmart)
フィラメント径:1.75mm 素材: TPU 直径公差:0.05ミリメートル± エクストルーダー温度(メーカー推奨値):195〜230°C プリント速度(メーカー推奨値):15〜30 mm/s ヒートベッド温度(メーカー推奨値):40〜60°C
フレキシブル素材のフィラメント。 他の素材に比べてゆっくり出力することが勧められている。
⑦PC素材フィラメント『PC-Plus:透明』(Polymaker)
フィラメント径:1.75mm 素材: ポリカーボネート系 直径公差:0.05ミリメートル± エクストルーダー温度(メーカー推奨値):250~270℃ プリント速度(メーカー推奨値):30~90mm/S ヒートベッド温度(メーカー推奨値):80℃
ポリカーボネートはエンジニアリングプラスチックに分類される。 その特性を3Dプリンターでも再現できるようにしたのがこのフィラメント。 エンジニアリングな高い強度, 靭性, 耐熱性と、高い透明度を有する。
車にはヘッドライトなどに使われている。
【モデリング】
いろいろなマテリアルで出力する用に、適当に自動車のモデルを作る。


窓の部分は穴が空きやすく、ひたすらEdgeSrfした。
おもちゃの車のような雰囲気を目指して単純にデフォルメして作成。 車好きの人からみたらおかしい点がたくさんあると思うが、車っぽいのでよしとする。
【3Dプリンターのセッティング】
今回はじめて、先日購入した3Dプリンターを使用した。 購入したのは HICTOP 3Dプリンター Reprap Prusa i3 。
付属のSDカードの中に入っている説明動画を見ながらセッティングしていく。

日本ではここを110Vにスライドさせないと、電源が入らない。
ともこに教えてもらっていたので悩むことなくセッティングできた。ありがとうともこ。

【出力】
準備が整ったので、作成したモデルを7種類のフィラメントで出力する。
①PLA
まずは付属のPLAフィラメントで試しに出力してみる。
ノズル温度:200℃ ベッド温度:60℃ プリント速度:75.0mm/s リトラクション距離:4.05mm リトラクション速度:53.3mm/s インフィル:10% アウトライン:2層
メーカーの推奨がmm/s単位で書かれていることが多いので、表示をmm/sに変更した。 また、Week2のときよりもものが大きいので、リトラクション距離を長めにしてみた。
この設定で出力。
が、まったくフィラメントが出ない。 いろいろとパラメーターや3Dプリンター側をいじってみるもののフィラメントが出ない。 とりあえずたくさん出そうと思い、レイヤー厚0.2mm、Flowをプリンター側で205にしてみたところ、出力された。
このプリンターでのはじめての作品がこちら。

はじめて出力されたものなので、すごく感動した。 硬さと重量感もあり、ころっとした感じがおもちゃっぽさが出ている。
しかし、汚い。 プリンターが安定していないことと、0.2mmであることがあいまって全く綺麗でない。
今ならちゃんと出そうだと感じたので、思い切ってレイヤー厚0.1mmで出力。 また、タイヤとボディーとの高さの差で前が落ちてしまったので、ラフトではなくサポート材を使うことにした。 時間削減のためにインフィルは5%に変更。

ちゃんとフィラメントが出た。

できたのがこちら。

0.2mmのときと比べると格段に綺麗になり、細かいところまできちんと出力されている。
しかし、なんだか0.2mmのものよりも安っぽい感じもする。 フィラメントの量を減らした結果なので、お金と時間を削ることで安物っぽさが出るのだということもわかった。
ただ、大体は綺麗であるが、上面のレイヤーを4層にしたものの、途中の斜めの部分は実質1層となり、穴が空いてしまった。

ここも綺麗に出力するため、モデルを15°傾けた。 こうすることで斜めの部分がすべて壁と同様の出力方法になり、隙間が埋められた。 サポート材が増えて時間もかかるけれど、綺麗さを求めて地道に出力する。

しかし、またもフィラメントが出ない。 出たとしてもぷつぷつとしたものしか出てこない。

いろいろと原因を探ってみたところ、ようやく突き止めた原因はフィラメントの設置方向だった。
左の向きでフィラメントをはめると角度が急になり、送り出しがうまくいかなかったらしい。 そこで右向きにはめ直したら、問題なくフィラメントを送り出し、出力することができるようになった。

これによって無事出力完了。穴の部分も綺麗になった。


②鋼系フィラメント
続いて鋼系フィラメントで出力。 メーカーの推奨値がPLAと近いので、とりあえずPLAと同じパラメーターで出力することにする。
フィラメントはもろく、すぐに折れる。手で引っ張ると力を入れなくても切れる。 折らないように気をつけながら、フィラメントをロード。
しかし、フィラメントがうまく穴に入らず、ロードができない。

ネジを外して分解してみたが、上の方はOPENと書いてあるのに、温度が高いまま開けると火花が散った。 壊れると困るので下の方だけいじり、緩めたりフィラメントをまっすぐにしたりして、なんとか穴に入るようにした。
鋼系フィラメントはロード以外は特に苦戦することなく、出力完了。

③アルミ系フィラメント
鋼系に続き、金属系フィラメントに挑戦。
鋼系フィラメントと違い、簡単に折れたり切れたりすることはない。針金のように手で曲げることができる。
まずは推奨温度を参考に、
ノズル温度:203℃ ベッド温度:40℃ プリント速度:51.7mm/s
で出力。うまくくっつかないので途中から
ノズル温度:205℃ ベッド温度:45℃
に変更した。 サポート材まではうまく出力できたが、アルミどうしがくっつきにくいため、サポート材と本体がはがれまくってうまくいかなかった。 仕方がないので一時停止して接着剤でくっつけ、本体を出力した。
少し前の部分が離れてしまった。

④木質系フィラメント
フィラメントから甘いにおいがする。
推奨値の幅が広かったが、とりあえず
ノズル温度:220℃ ベッド温度:50℃ プリント速度:51.7mm/s
で出力して特に大きな問題はなかった。
ただ途中に何本か線が入ってしまった。 出力中放置していたので何が起こったのかわからないが、少しずれが生じてしまったのかもしれない。 もう少し綺麗にする余地があるように思う。
完成品からも甘いにおいがする。

⑤カーボン系フィラメント
推奨値に従って
ノズル温度:255℃ ベッド温度:85℃ プリント速度:50.0mm/s
で出力。何も問題なく出力できた。 FormFutura社のフィラメントは扱いやすいのかもしれない。
鉛筆の芯のような光沢と独特のにおいがする。

⑥TPUフィラメント
はじめはFormFutura社のPython Flexを使おうと思ったのだが、家のプリンターではフィラメントが柔らかいために送り出しがうまくいかなかったので、ZのMUTOHでSainSmart社のフィラメントを使って出力した。
ノズル温度:195℃ ベッド温度:60℃ プリント速度:35.0mm/s
2週目に使ったフィラメントなので、温度はそのときのパラメーターで出力。 プリント速度はそのときよりも遅くしたのだが、後から調べてみたところ推奨速度はもっと遅かった。
少し穴が空いてしまったが、それ以外は問題なく出力。 もう少し綺麗に出したかった。

⑦PC
最後にポリカーボネート。
はじめは推奨温度に従って、 ノズル温度:260℃ ベッド温度:80℃ プリント速度:50.0mm/s で出力した。
購入の際、要BuildTakと書いてあることに気がつかずに購入してしまった。 持っていないので気にせずいつも通りマスキングテープの上に出していく。
ロードの時点で出てきたフィラメントがすぐに固まることがわかった。
出力してみると、フィラメントがノズルについていってしまい、さらにすぐ固まることでぺりぺりとはがれていってしまった。
そこでプリント速度を30.0mm/sに変更。 よくくっつくように、ベッドの温度も85℃に上げた。
それでも一部分は反ったりはがれたりしてしまった。 ピンセットで抑えながら出しても反りが強く、うまくいかない。

しかしPCは硬いので、浮いてはいるものの他の部分と離れてはいない。 一時停止して接着剤を使うことも検討しながら、とりあえずそのまま見守ることにした。
結果、下の部分が浮いてしまったものの、底面を作る際にうまく残りの部分とくっつき、上の部分はなんとか造形された。

途中でも何度か反る部分は出てしまった。 おそらくベッドの端に近い側が冷めやすく、固まって反りやすいのだと思われる。 冷めて反っているのではないかと気がついたのでファン速度を0にしたが、途中からだったので効果がどれくらいあったのかはわからない。
途中まで順調だったが、77%まで出力したところで底面がマスキングテープからはがれるという事件が発生。

一時停止して接着剤でマスキングテープと接着してみたが、惨敗。

諦めたくないので、マスキングテープを交換し、再び接着剤で接着。 さらに側面もマスキングテープで補強。

が、今度はマスキングテープがベッドからはがれてしまい、敗退。

仕方がないので諦めることにする。
この失敗により、「要」と書いてあったBuildTakはやはり必要だったということを学んだ。
>> 次へ
Week4:2018.04.24 ~ 05.07
0 notes
Photo

FabNow3
今回のテーマはパラメトリックモデリング。
課題は ある(実在の)「椅子」のパラメトリックモデル (パラメータは最低でも 8個を抽出)をつくり、最低でも "64個" のバリエーションをつくってくること。結果は「1枚のグラフィック」にきれいにまとめてくること。 である。
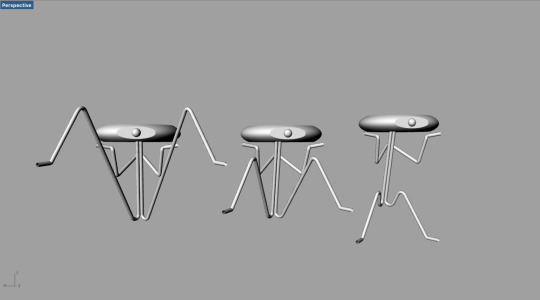
私が選んだ椅子はPhillip GrassのCompanionという椅子。

座面はオーク, ビーチ, マホガニーの3種類がある。

体の部分のカラーバリエーションは4つ。

この椅子はもともと、Phillip Grassの別作品であるFlying Chairという椅子を先に見つけ、Phillip Grassのホームページに飛んだことで見つけた。

Phillip GrassのFlying Chair
Flying Chairもパラメーターが抽出しやすそうで、パラメトリックモデリングをしたら面白そうだなと思っていた。 しかしCompanionを見た瞬間、一目惚れしこの椅子をモデリングしたいと思った。このデザイン自体が好きだし、パラメーターをいじったら個性的なやつらがたくさん生まれてくると思ったからである。
まずはGrasshopperでモデリングをする。
基本となる点と平面を定め、それを基準にモデルを作っていく。
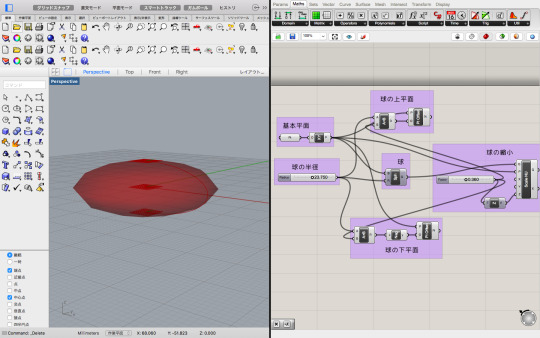
最初は座面となる頭の部分から。 円柱をフィレットしようと思ったのだができなさそうだったので、球をつぶして上下を切り取る作戦に切り替えた。
球をZ軸方向に縮小し、上下に平面をつける。 厚さが変わっても球の上下に平面があるようにするため、半径に縮小率をかけた長さだけ基本平面をオフセットした。下側は長さを負の数にしてオフセット。
コンポーネントは訳がわからなくなるので、自分でわかるように名前をつけてグループ化していった。
ここで、 ①頭の半径(球の半径) と ②頭の厚さ(球の縮小率) が最初のパラメーターとなる。
なお、パラメーターやグループの名前は私個人が理解できるようにつけたので、部位の名称としておかしかったり統一性がなかったりするが、深く考えずに読み進めてほしい。
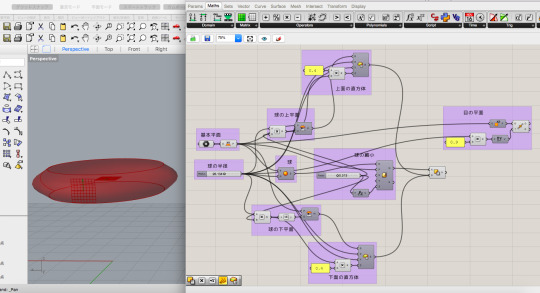
上下の平面を基準にして、切り取る用の直方体を作成。 切り取る部分は頭の厚さに合わせたいので、厚さの半分の20%に設定した。

厚さに合わせて直方体の位置も動き、厚さが変わる。

この直方体でSolid Differenceし、球を切り取る。
ここでコンポーネントの表示が文字よりもアイコンのほうが個人的にわかりやすいことに気づき、表示をアイコンに変更。 (Display→Draw Iconsにチェック)

基本点を変更し、頭を上に移動する。 また、切り取る割合は40%のほうがいいと感じ、変更。

次に目の部分を作る。 基本点から球の半径の90%離れた位置に、xz平面を作成。
Cylinderを縮小し、Cap Holesで円柱にしてSolid Difference。 できるだけパラメーター要素を残しておいて後で選ぼうと思い、最終的に選ばなかったが、この時点で半径と縮小率はスライダーで変更できるようにした。

黒目を球で作り、目が完成。

これで頭ができたので、体の作成に移る。
まず適当にRhinoceros側で点を打って曲線で繋いでみたが、滑らかすぎる。曲線なのは関節部分��けだということが判明。 それにこれだと点の位置が動かせないのでパラメトリックにならない。

ということで仕切り直して点の位置から”論理的に”設計する。
胴の付け根部分は頭の厚さに合わせて動くようにするため、直方体のときの平面の位置の少し上に設定。基本平面を直方体の平面位置の40%にオフセット。 Point Orientedで平面を元に点を定め、そこからLine SDLを引く。
ここで ③胴の角度 と ④胴の長さ がパラメータに。
Line SDLのDはDirectionでベクトルなので、スライダーで角度として扱うことができるように、Rotateでz軸単位ベクトルをx軸を軸に回転させたものを入力している。
太ももにあたる部分は胴体から少しずらした点を始点にする。 そのためまずPlane Normalで胴の付け根部分に胴体を法線ベクトルとする平面を作成。その平面を胴の長さ分だけオフセットした。 Point Orientedにおいて原点を少し移動させてからは、胴体と同様Line SDL。

胴の長さを変えても残りの脚もついてくる。

股関節の角度も変更可能。

ここまででパラメーターとして ⑤股関節の角度 ⑥太ももの長さ が追加された。
ふくらはぎにあたる脚部分も同様に作り、各関節をBlend Curveで滑らかに結合し、Joint Curvesで1本の曲線にする。

その曲線を元にPipeでサーフェスを作るとこんな感じ。 Blend Curveのbulge factorで膨らみを0.7や0.8に調節した。

少し順序がイレギュラーになってしまったが、足部分も同様に作成して、右半身が完成。 どこのパーツから作っても、結合する曲線を後からいくらでも追加変更できるというのがGrasshopperの柔軟なところだなと、良さを実感した。

追加されたパラメーターは ⑦膝の角度 ⑧ふくらはぎの長さ ⑨足首の角度 ⑩足の長さ ⑪胴・脚の太さ。
そして右半身を胴体を軸として回転し、それをyz平面を鏡面としてMirror。
このとき、胴体の部分がぴったりとくっつくように、胴の付け根の点を、胴の太さの値を引いて定め直した。
⑫開脚の角度 がパラメーターとして追加。

以上のプロセスと同様にして腕も作成。

腕のパラメーターは ⑬上腕の角度 ⑭上腕の長さ ⑮前腕の角度 ⑯前腕の長さ ⑰手首の角度 ⑱手の長さ ⑲腕の開く角度 である。 腕の太さは⑪に追加。
これで、基本となるパラメトリックモデルが完成。

この状態だとパラメーターの変更とBakeがやりにくいので、パラメーターと本体部分をそれぞれ抜き出した。

これらのパラメーターを変更していく。 なるべく違う個体を生み出したかったので、該当のパラメーターひとつだけでなく、同時に他のパラメーターも変更した。 また、上記の数字と番号がずれるが、作った順に紹介する。
1.頭の半径

2.頭の厚さ

3.胴の角度

4.胴の長さ

5.股関節の角度

6.太ももの長さ
7.膝の角度

8.ふくらはぎの長さ

9.足首の角度

ここで、手足のパイプの先がふさがっていないことが発覚。

Cap Holesができなかったので、足の長さだけ平面をオフセットし、パイプの太さ分の円を描いてサーフェスを作成。

ということで作り直して足首の角度をパラメーターとしたのがこちら。 足首の変化は地味だったので一つだけ。

10.足の長さ

11.上腕の角度

12.上腕の長さ

13.前腕の長さ

14.手首の角度

15.手の長さ

16.開脚の角度

17.腕の開く角度

この��たりで、パラメーターをいじっても似たようなやつらが生まれていることに気づき、他のパラメーター変化を大きくした。
18.腕・胴・脚の太さ

19.その他

18までで57体できていたので、残りの7体は好きなようにパラメーターをいじって作成。
こうして作った64体をFusionにアップロードし、レンダリング。 座面はいろいろな種類の木材、体の部分は鋼を本家に倣って4種類の色でペイントした。
どのようにまとめるか悩んだ結果、正投影の画像を並べることにした。最終的にGimpで取り込んでまとめた。
完成したのがこちら。タイトルはCompanions。

正投影なので整然と並んだ面白さは出たが、胴体の角度など、正面からではわかりにくい違いの面白みは薄れてしまった。
<サイトの改良>
トップページにおいて画像のサムネイルのサイズが統一されていなかったので統一した。 単にwidthとheightのサイズを指定するだけだと画像がゆがんでしまう。 そこで散々調べた結果、object-fitを使えばいいことが判明。
.pickup.type_photo img{}に、
object-fit: cover;
を追加。
coverはオブジェクトのアスペクト比を保ちながら、コンテンツボックスを完全に覆うようリサイズする。オブジェクトの幅と高さのうち、短いものがコンテンツボックスにフィットし、長いものははみ出す。
他にもコンテンツボックスに対するリサイズの仕方によって、fill, contain, none, scale-downがある。
Week3 : 2018.04.17 ~ 04.23
0 notes
Photo

FabNow2
今週の課題は 「何らかの機能を持ったテクストラクチャーを2つ以上作ってくること」。
私は真っ白なルービックキューブとサイコロを作った。 完成品がこちら。

機能はそれぞれルービックキューブやサイコロとして使って「遊ぶことができる」ということである。
真っ白にした理由は、私が牛乳パズル(すべてのピースが白色のジグソーパズル)が好きで、今回の作品を真っ白なおもちゃとして、牛乳パズルに仲間入りさせたかったからである。
ログは長くなるので、ルービックキューブとサイコロとでページを分ける。
→ ルービックキューブ
→ サイコロ
Week2 : 2018.04.10 ~ 04.16
0 notes
Photo

FabNow 1
第1週目の課題はWebサイトを作ってくること。 広告が入らない点が気に入ったので、私はtumblrで作ることにした。

テンプレートを適用した時点でのページ。これを改良していく。
まず、ただのWebサイトとして使いたいので、リブログなどのアイコンを消す。

HTMLの該当するリストをごっそりと削除。

消えた。
同様に、~minuits ago の表示も邪魔なので消す。

Keep Reading の文字はHTMLがどうしても見つからなかったので、CSSで
font-size: 0px;
として表示させないようにした。

次に右上に出てくるコントロールアイコンを消すことに挑戦した。
<meta name=“if:Hide Tumblr Controls” content=“0″ /> <style> {CustomCSS} {block:IfHideTumblrControls} #tumblr_controls { display: none; } {/block:IfHideTumblrControls} </style>
を打ち込んで、カスタマイズの項目にコントロールの非表示を追加した。

しかし、これをオンにしても画面から消えない。 スイッチのオンオフにせず、直接
{CustomCSS} iframe#tumblr_controls{ display: none; }
と打ち込んでみたが消えなかった。 アイコンの要素の検証をしたが、単語がHTMLで検索にひっかからず見つけられなかったので、非表示にするのは諦めることにした。
※4/10追記 今サイトを開いたら表示が消えていた。 Tumblrにログインしている状態だと表示される模様。
次に、サムネイルの画像の角を丸くする。 CSSで
border-radius: 8px;
を記述する。 初め Basic Style の img に追加してしまったので記事の画像も角が丸くなってしまったのだが、
.pickup.type_photo img
に追加することでサムネイルのみを角丸にすることができた。

最後にタイトルの下に文字を追加する。 float: left; を消したり display: block; にしたりしても横並びになってしまったので、
clear: left;
で float: left; の回り込みを解除した。
その他フッターやタイトルの配置、文字間隔や行間、フォントなどを調整して、完成。

いろいろと改良したい点はたくさんあるが、それらは今後少しずつ手が空いたときに実装していこうと思う。
Week1 : 2018.04.03 ~ 04.09
0 notes