#labdecals
Video
undefined
tumblr
Essais des trois capteurs de températures sur labdec et enregistrement des valeurs sur carte SD.
3 notes
·
View notes
Text
S21 - Finition du projet
Lors de notre dernière séance nous avons réalisé tout les tests que nous avions fait précédemment sur la plaque labdec directement sur la carte. Les tests se sont avérés concluants et nous avons pu donc réussir le projet.
0 notes
Text
Séance 18
Fin de la construction sur Eagle de la carte commande.
Fin de la construction sur Labdec de la sécurité de température
0 notes
Text
Séance 9 du 9 Décembre 2021
Résumé de la séance :
1) Soutenance oral
2) Test du programme labyrinthe
1)
Lors de cette séance, il était prévu une soutenance oral de 15 minutes, où l’on a présenté notre projet à nos professeurs en leur précisant le cahier des charges, les spécifications du robot, l’avancement de notre projet et ce qu’il nous restait à faire (1 minute était à faire en anglais soit 2 car nous sommes en binômes).
Bien sûr ce n’était pas parfait, il y a des modifications à faire et encore du travail pour être prêt pour la Soutenance de fin de semestre 3 qui se déroulera donc en Janvier 2022.
2)
Après la soutenance nous avons voulu tester le programme labyrinthe qui avait été réalisé à la maison. Nous avions pu le tester chez nous car nous avions notre propre capteur US (quasiment le même que celui utilisé en cours) et aussi un servomoteur (identique à celui utilisé en cours). Grâce à une carte ELEGOO UNO R3 qui fonctionne presque comme la carte ARDUINO UNO, d’un écran LCD 16*2 et d’une plaque labdec et de quelques fils on a alors pu simuler le robot dans le labyrinthe mais sans les moteurs et les roues, c’est pourquoi nous affichions sur l’écran LCD chaque mode du programme que le robot était censé réaliser : Mouvement à gauche/ droite/ devant, Tourner le capteur, Faire un tour sur lui même, Tourner de 90° etc...
Voici un exemple où l’on simule une impasse c’est à dire, un mur à gauche, devant et à droite, le robot est donc censé faire un tour sur lui même puis le capteur regarde devant pour effectuer le mouvement “devant” pour ensuite se repositionner à gauche car le capteur regarde toujours le coté gauche en premier :
https://drive.google.com/file/d/1E8Mto729hkqfbjlV5iidCmYJ-nB4PNCH/view?usp=sharing
Nous avons alors téléversé le programme sur la Carte Arduino UNO de notre robot et avons alimenté nos cartes à l’aide d’un générateur de tension (11,1 V) car toujours pas de batterie. N’ayant donc pas de batterie et n’ayant toujours pas la coque du robot qui va permettre de fixer les boutons, le servomoteur ainsi que le capteur, le test était plutôt gênant à réaliser car il y avait beaucoup d’encombrements. On n’a pas pu filmer le test, mais cela a fonctionné, on espère donc vite recevoir la batterie et la coque (en cours d’impression) pour plus de souplesse.
Voici une photo du labyrinthe que le robot doit parcourir :

Au prochain cours on fixera la coque ainsi que les boutons capteur etc... Si on a une batterie, on retestera le code pour l’améliorer s’il y a des imperfections. Et s’il nous reste du temps on commencera la partie où le robot doit étudier le labyrinthe pour le reparcourir sans se tromper.
1 note
·
View note
Text
Séance n°15 à la séance n°22
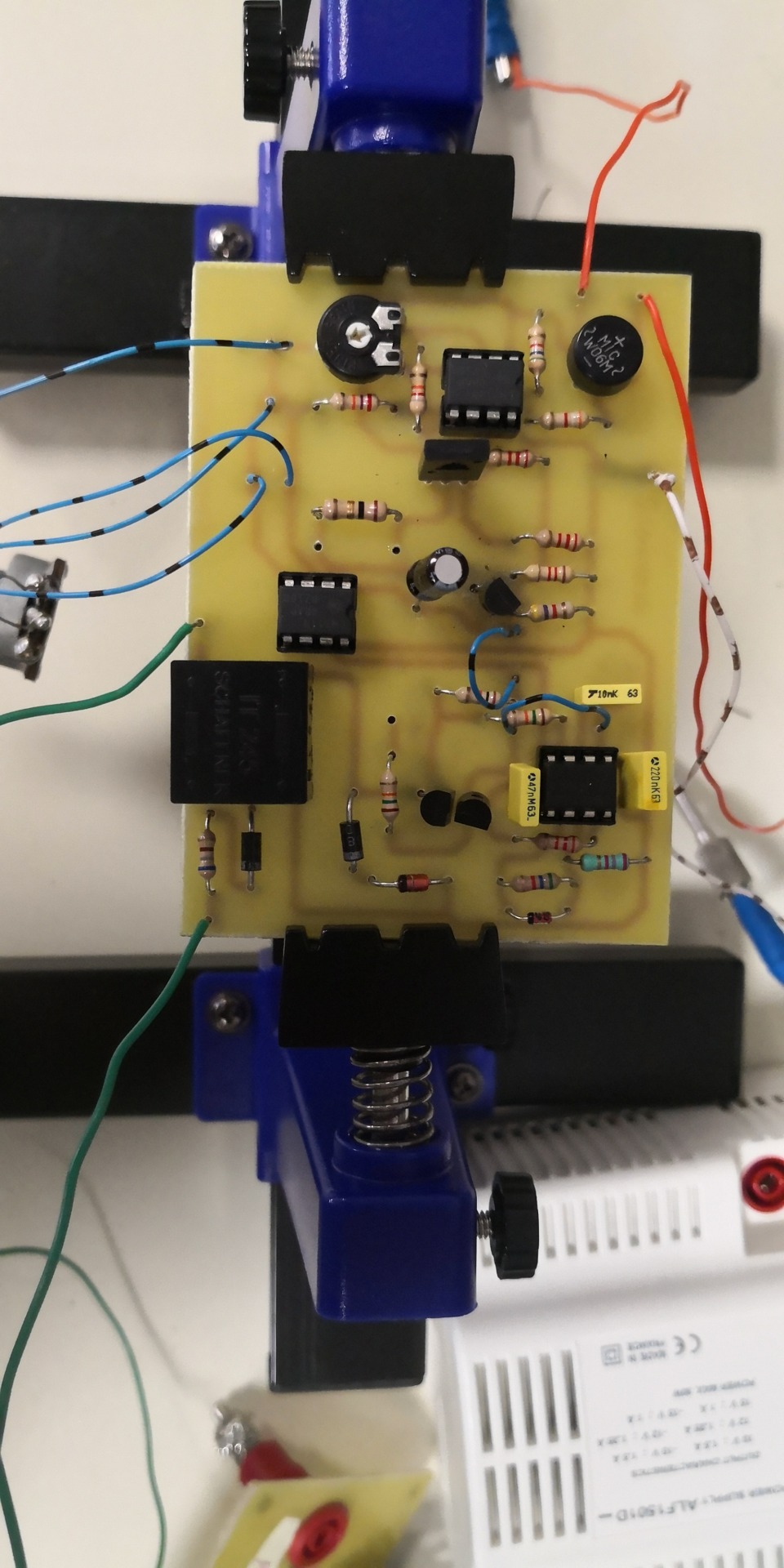
Durant ces séances nous avons fini de travailler sur la sécurité et nous avons commencé a travaillé sur la carte imprimé pour mettre notre montage qui était sur la labdec sur la carte. Vous pouvez voir sur l’image au dessus notre carte imprimée finie .
Nous avons quelques problèmes avec la carte car il manquée des routes qui ne c’était imprimée ou des routes qui se sont enlevées à cause de dé soudé et ressoudé. Nous avons eu aussi un problème avec la dents de scie car il manquée des routes, j’ai du changer les résistances car elles sont mortes, j’ai aussi dû changé les transistors car il ne laissé pas passer le courant. J’ai aussi changé par précaution le condensateur car on ne savait pas si il fonctionner encore
0 notes
Photo
Notre labdec avec tous les composants permettant de commander notre gâchette.
0 notes
Text
No ritmo atual, UTIs podem lotar na primeira quinzena de maio
FERNANDO CANZIAN
SÃO PAULO, SP (FOLHAPRESS)
Ferramenta criada por um grupo de pesquisadores da Universidade Federal de Minas Gerais (UFMG) permite aos gestores estaduais e de hospitais envolvidos no combate à Covid-19 fazer simulações realistas sobre a velocidade com que leitos gerais e de UTI serão ocupados nas próximas semanas.
O dispositivo pode ser acessado por qualquer pessoa e usa dados oficiais (como o número de leitos) e premissas baseadas no que ocorre no dia a dia da epidemia (como os novos casos de Covid-19). As novas informações vão ajustando o modelo matemático e aumentam a capacidade de previsão.
Na estimativa dos pesquisadores, haverá falta de leitos de UTI públicos e privados a partir da primeira quinzena de maio -isso considerando que a quantidade de infectados vem duplicando a cada 5,1 dias, o que pode mudar.
A lotação das UTIs duraria mais de dois meses no SUS (onde a maior parte da população é atendida) e cerca de um mês no sistema particular. Em ambos, o tempo de internação de pacientes de Covid-19 vem variando de 15 a 21 dias.
De forma geral, estima-se a falta de leitos de UTI duas semanas antes para a população dependente do SUS em relação aos usuários de plano de saúde.
Já a ausência de leitos gerais poderá ocorrer na segunda quinzena de maio. A duração desse déficit seria de
em torno de duas a três semanas, pois os pacientes ocupam esse tipo de leito por menos tempo.
A equipe tem trabalhado ainda para estimar as necessidades de leitos de UTI públicos e privados separadamente, dada a decisão do STF de não intervir na criação de uma “fila única” de pacientes, por gravidade, como estão propondo algumas entidades de sanitaristas.
A ferramenta considera o percentual de pessoas que têm apresentado sintomas que as levam a algum tipo de internação, a velocidade de propagação do vírus, a taxa de ocupação das UTIs antes do início da epidemia e o perfil ajustado, por estado, de idosos com 65 anos ou mais.
Ela permite ainda que, depois de baixada em planilha Excel, o usuário possa fazer as suas próprias simulações ou mudar os critérios adotados inicialmente, como o percentual de pessoas afetadas à medida que a epidemia evolui. “O objetivo é propor um modelo matemático para previsão da disponibilidade de leitos durante a pandemia e calcular os momentos de ruptura dos sistemas. As premissas podem ser mudadas e validadas pelos gestores e profissionais da saúde”, diz João Flávio de Freitas Almeida, professor adjunto do Departamento de Engenharia de Produção da UFMG.
A ferramenta está disponível no site do Laboratório de Tecnologias de Apoio à Decisão em Saúde (Labdec) e traz todas as notas técnicas e critérios adotados pelo Departamento de Engenharia de Produção e pelo Núcleo de Educação em Saúde Coletiva (Nescon), órgão de ensino e pesquisa da Faculdade de Medicina da UFMG.
Para consultar, basta ir ao site da ferramenta (https://ift.tt/2yPcJkj).
0 notes
Text
Séance 17
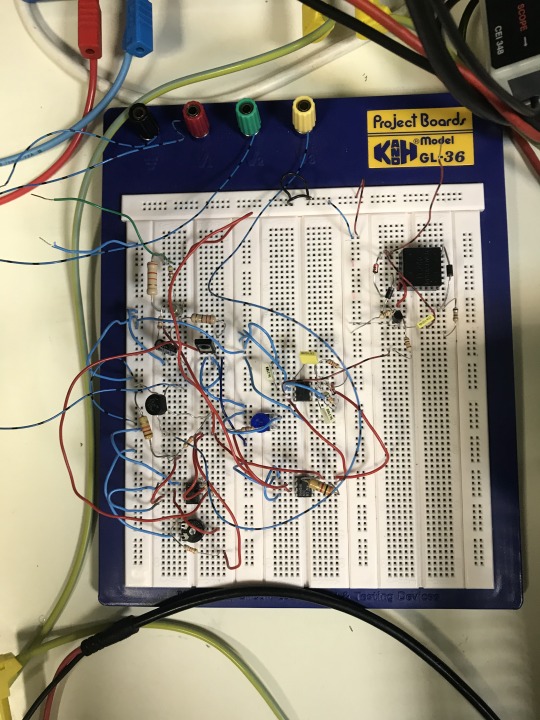
Nous avons débuté en faisant des tests avec le capteur de courant pour cela nous l’avons alimenté à l’aide d’un labdec :
puis nous avons créé un programme permettant de lire une donnée :
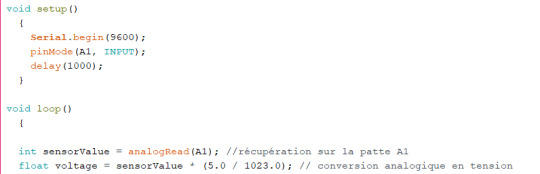
puis la valeur analogique est convertie en tension pour pouvoir étudier les mesures.
Puis nous avons vu que les valeurs étaient stables à l’exception de certaines valeurs, par conséquent nous affichons une moyenne de 10 valeurs avec le code suivant :
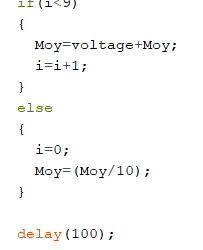
Puis nous obtenons des valeurs plus stables, ensuite nous désirons afficher le courant utilisé par les capteurs du projet chalet. Pour cela nous devons calculer une résistance pour obtenir un courant à partir d’une tension (loi d’ohm). En effectuant quelques tests en ajoutant et enlevant des capteurs pour que le courant varie.
De cela nous avons calculé une résistance de 0.380 en moyenne. Par conséquent on calcule le courant et on l’affiche sur le port série :

Puis au final nous obtenons les bonnes valeurs.
Dans un second temps nous nous intéressons à la nouvelle carte SD : carte shield DFR0074 .
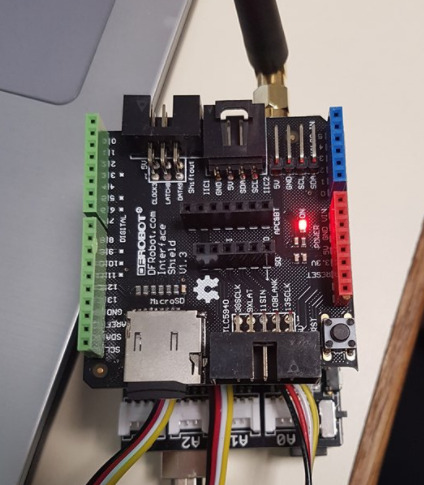
Nous avons tout d’abord étudié la carte en recherchant des informations:
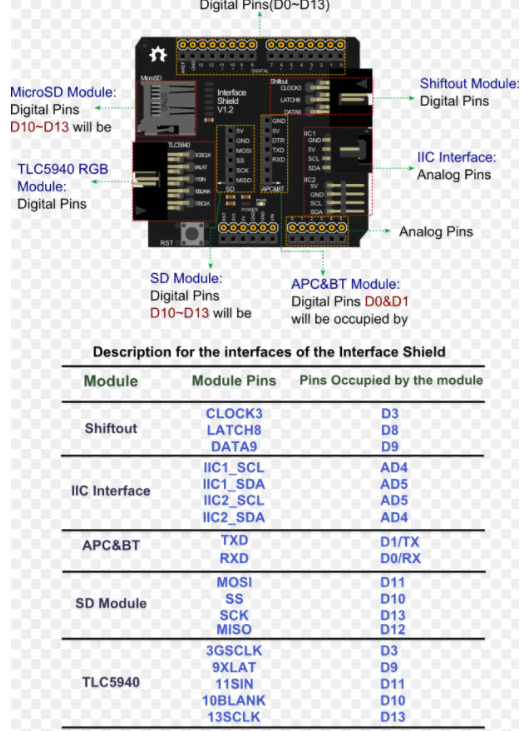
Et les pattes qu’elle utilise pour voir si elle utilise également les mêmes broches que la carte de transmission :
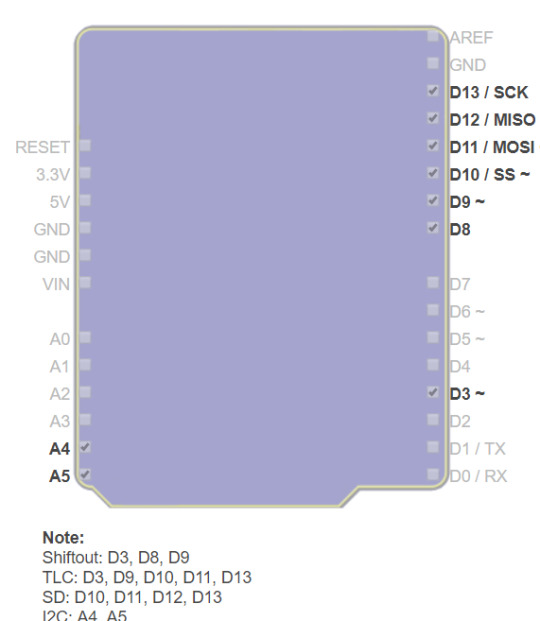
Après tests avec le programme on s’est rendu compte que la patte 10 était utilisé par les deux cartes, donc nous avons essayer d’alterner l’utilisation de chaque patte au niveau du programme cependant alors de nombreux essais nous n’avons obtenu que des échecs.
Prochaine séance : création de l’interface labview, recherches de solutions pour la carte sd + transmission.
0 notes
Text
Séance du 5/12/2017
Durant cette séance nous devons terminer le transformateur d’impulsion. Nous avons le schéma suivant :
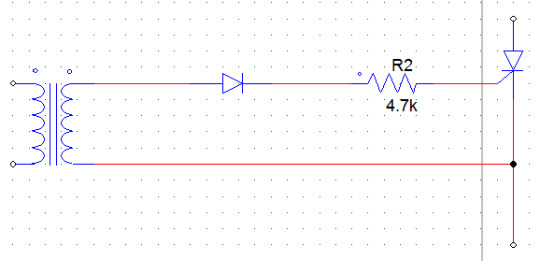
Le courant circulant dans la gâchette doit être égale à 10mA, ainsi nous prenons R2 = 4,7kohms.
Remarque : Plus la résistance est petite, plus le transistor va se bloquer longtemps.
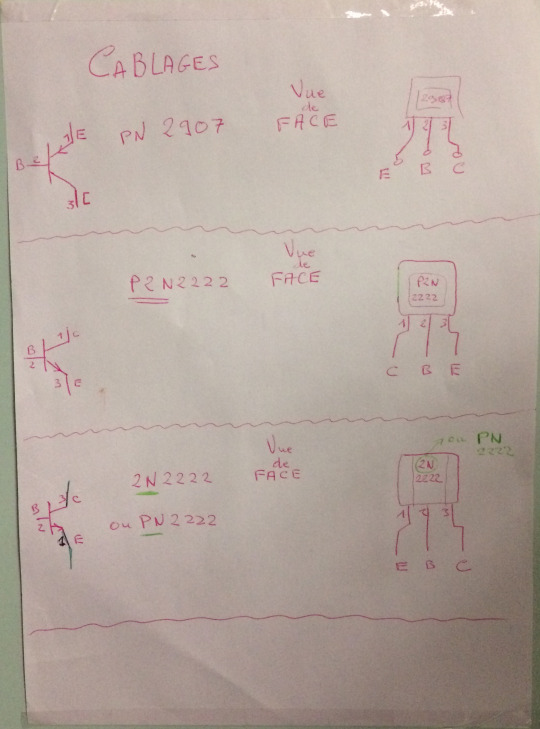
On choisi le transistor PN2222. Attention il y a deux types de transistors, comme nous pouvons le voir sur la photo ci-contre, nous avons le P2N2222 et le PN2222.
Avant toute chose nous vérifions que l’on a bien T = 60us sur la patte 3 de l’oscillateur.
Nous avons mis en place sur la partie gauche de la LABDEC le schéma avec le transformateur d’impulsion.
Nous avons bien le signal suivant :
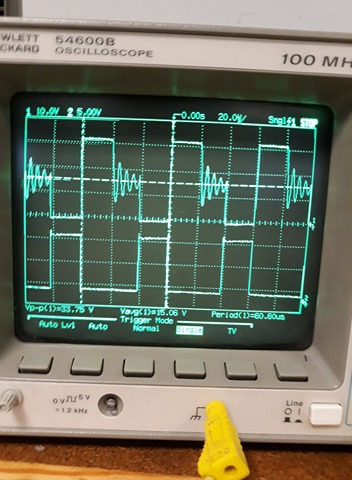
Pour la suite des test nous avons mis une sonde en sortie du TI en mettant la patte 1 de sortie à la masse. Nous obtenons ainsi le +15V, -15V, 0V.
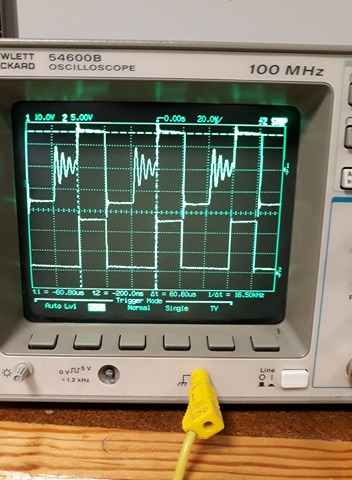
Lorsque nous avons -15V, c’est la démagnétisation des diodes et nous avons 0V au primaire et au secondaire.
Ensuite, nous testons les thyristors avec une alimentation de +15V à la place du montage. Nous avons le schéma suivant :
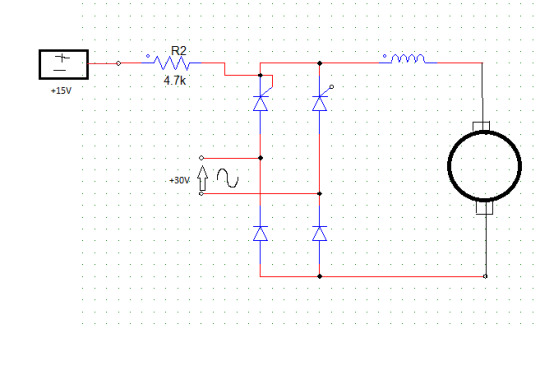
On a bien environ +30V en sortie de la charge ( rhéostat = moteur ). On remarque qu’il suffit d’une petite impulsion pour pouvoir déclencher le thyristor.
Ainsi durant cette séance nous avons testé à la fin un pont à thyristor avec une alimentation de +15V et de +30V.
Durant la prochaine séance nous allons testé ce schéma sans l’alimentation de +15V et faire fonctionner le moteur.
0 notes
Text
Séance 11
Création du blog + tentative de réparation de la tablette Labdec car la partie commande et puissance fonctionne mais pas les sécurités.
0 notes
Text
Avancement du projet
Depuis un petit moment nous n’avons rien publié sur notre page du blog. Nous avions commencé à gonfler les muscles mais depuis un petit moment nous étions bloqués. Cela est de notre faute car nous pensions que les branchements sur la labdec des transistors NPN ou bien PNP était tous les même en fonction de la catégorie du transistor (branchement de la base, émetteur, collecteur). Nous avions un transistor PNP que nous ne branchions pas correctement, nous avions mal lut les caractéristiques de ce transistors. Mais cela est maintenant réglé et dans pas longtemps vous aurez de nos nouvelles !
0 notes
Photo

Can you believe how big our #lacrossedog #labradors #labradorretriever #labrador #lab girl, Karma has gotten? She’s only 7 months still but such a big, beautiful girl! What a difference from the scared, skinny little girl she was when we got her! She rode with me to pick Chance up from his after school #lacrossepractice and she’s so wanting to jump up and grab all of those #lacrosseballs ! I didn’t think of that when she was at the door begging to ride with me! In our house, when Alyssa (yep! She’s learning to play now!) or Chance picks up their #lacrossestick , Karma gets excited and starts chasing them down- this girl loves being a #lacrossepup and living the #lacrosselife - unfortunately for her, when he’s practicing at the school she has to live more of the #momlife 😂and wait and watch like i do! It’s not so bad, Karma! I love being a #lacrossemom #labmom ❤️ love labs, lacrosse or just being a #mamabear ? Check out all of the #personalisedgifts #personalizedgifts #lacrossemomshirt #decals #personalized #monogram #dogdecal in our #etsyshop #etsysellersofinstagram #labsofinstagram - I just finished a personalized #labdecals custom order for another #labmama - links are in our bio #shopsmall #momboss #smallbusinesssaturday #mompreneur
#labrador#momlife#shopsmall#lacrossestick#labradorretriever#etsyshop#mompreneur#lacrossedog#smallbusinesssaturday#personalized#lacrossemom#lacrossepractice#lacrossepup#monogram#labmama#personalisedgifts#mamabear#etsysellersofinstagram#personalizedgifts#dogdecal#lacrosseballs#labsofinstagram#lacrosselife#labmom#lacrossemomshirt#labradors#decals#labdecals#lab#momboss
0 notes
Text
Compte-rendu de la 10eme séance de Projet, Semestre 4. 30 Mars 2017
Lors de cette séance, nous avons fait plusieurs essais sur la carte imprimé cependant cette dernière ne fonctionnait pas.
Nous avons donc essayé de la dépanner mais en vain. Le programme fonctionne donc seulement avec les filtres présent sur la labdec de la carte PSoC 5LP.
0 notes
Text
Montage électronique des capteurs
Nous allons d’abord essayer de réaliser un montage labdec permettant de tester nos capteurs sur nos tensions créées et ensuite nous ajouterons à notre fichier Eagle les composants nécessaires au fonctionnement de nos capteurs.
Les capteurs de température sont alimentés en 5V à partir de notre 7805.
Les capteurs de courant sont alimentés en 15V à partir de notre 7815 et leurs sorties polarisés par des résistances de charge de 10kohms de façon à ce qu’ils fournissent une tension de sortie variant jusqu’à 4V+40mV, tension adaptée à la carte Arduino.
Le capteur de vitesse sera polarisé par deux résistances différentes dont nous n’avons pas encore déterminé les valeurs.
0 notes
Text
Tests du montage d’alimentation
Nous avons réalisé le montage d’alimentation que nous avons imaginé en utilisant les condensateurs de découplages donnés dans la datasheet de nos régulateurs de tension fixe.
Nous avons eu des résultats satisfaisants à quelques mV près et des composants capables de fonctionner jusqu’à 100/200mA de débit.
Le montage labdec étant fonctionnel, nous avons réalisé la schématic et la board Eagle y correspondant.
0 notes
Last Seen Blogs

linsdoceara1
curta 👍

faiz-penang-blog
Untitled

lindseystirling-aesthetics
lindsey stirling aesthetics

lingzhcu-blog
autoplay

douglastapecaria
Sem título