
Don't wanna be here? Send us removal request.
Statistics
We looked inside some of the posts by caglaraslan and here's what we found interesting.
Average Info
Notes Per Post
1
Likes Per Post
1
Reblog Per Post
0
Reply Per Post
0
Time Between Posts
1 day
Number of Posts By Type
Text
10
Photo
1
Link
1
Last Seen Tumblr Blogs





Fun Fact
In 2020, 27% of US Tumblr users had an annual household income of over $100,000.
Text
DP ve Offshore Hakkında Bilinmeyenler

DP'li bir gemide çalışma şartları nasıldır? Ülkemizdeki offshore gemilerinde yabancı personel var mıdır? Sertifikayı aldığınız takdirde iş bulma şansınız nedir ve bu sektörde açık var mıdır? Sertifika alım sürecinde gemide DP stajını doldururken maaş alınıyor mu? Türkiye piyasasında DPO olarak maaşlar nedir? Zabit kadrosunda görev tanımları nelerdir? gibi sorular üzerine sizlere bilgi ve tecrübelerimi aktarmaya çalışacağım. Herşeyden önce Yasin Ufuk EROĞLU kardeşim, bu iş alanında hevesli ve istekli olduğun ortada, ülkemizde uzun bir süre araştırma faaliyetleri yapılmaktaydı ama 2013 yılında Barbaros Hayreddin Paşa Araştırma Gemimizin sismografik, özellikle de petrol ve gaz araştırmalarında kullanılmak üzere alınmasıyla bu iş ülkemizde de ivme kazandı. Bu ivme giderek artacak böylelikle bu sektörde istihdam da çok daha artacak bundan emin olabilirsin. İlk aşamada gerçekten istekli olmak, kendini bir adım öne atmak, kendine gelecek için yatırım yapmak ve daha iyi şartlarda yani çok daha üst seviye profesyonel bir ortamda çalışmak isterken bu ortamın yorucu, stresli, hata yapma riskinin yok denecek kadar az olduğunu unutmamak gerek. Bunun yanında bu riskin ve yoğun ortamın kazancının maaş olarak tatminkâr seviyede olduğunu söylemem gerek. Bunları göze almak ve bu yolda devam etmek istiyorum dersen Temel Eğitim Kursunu almanı tavsiye ederim. (Nerde ve nasil alacağın, ücreti konusunda bilgi veririm) Şimdi sertifikayi aldın, ilk süreçte şöyle bir zorluk yaşayabilirsin: Şu an için firmalar, çoğunlukla offshore gemilerinde çalışmak için minimum 24 ay deniz hizmeti istemekteler. Şöyle ki; iş hayatına yeni başlayacak arkadaşlar için, sektör büyüyor, çalışma alanı genişliyor ve bu açıdan bakarsak şansını herzaman zorlamak en doğru yol diye düşünüyorum. Şansın yaver gitti, stajını buldun, nasıl çalışacaksın? Kendimden örnek vererek anlatayım; ben Barbaros Hayreddin Paşa'da çalışmaya başlamadan önce, DP Basic Induction eğitim sertifikamı almıştım. Aynı zamanda ben başladığımda 2. Kaptanlığım da vardı. Gemide o zaman 3. ve 2. Kaptan yabancıydı, ben stajer olarak tüm vardiyalarda periyodik olarak bulunarak, 6 hafta gemide eğitim gördüm ve gözlem yaptım. Bu süreçte de normal zabit maaşımı almaya devam ettim. İkinci sefere çıktığımda yabancı 3. Kaptanı gönderdiler ve ben 4. Kaptan olarak görevime devam ettim. Bu süreçte DP stajımı tamamlayarak, sertifikamı aldım. Zabitlikte ticari gemilerle kıyasladığımızda, daha profesyonel bir çalışma ortamı mevcut, herkes kendi işini yapmakta, Sismik Araştırma gemilerimizde işleyiş 4. Kaptan isen günde 12 saat çalışma mevcut, vardiyanı tutuyorsun varsa 12 saat içinde uygun zamanında safety işlerin ile meşgul oluyorsun. 3. Kaptan da aynı şekilde Seyir Zabitliği görev ve sorumluluğunu yerine getirmektesin, bunları yaparken SDPO ile beraber DP sistemine aşinalığın artmakta, bu şekilde seyir vardiyası ile DP vardiyasını birlikte yürütmen gerekmektedir. Ticariye göre daha rahat diyebilirim ama risk noktasında çok daha riskli. Türkiye de yeni gelişmekte olan bir sektör olduğu için, yetişmiş personel sıkıntısı devam etmekte. Bu yüzden bizler tamamen Türkleştirmek için elimizden gelen gayreti göstermekteyiz. Ben araştırma gemilerimizde ilk Türk 2. Kaptan olarak görevime başladım ve bundan sonra daha çok gayret ederek bu süreci hızlandıracağımıza, her alanda aktif olacağımıza inanıyorum. Yabancılarla çalışılan bir ortam düşünürsek, ileri düzey İngilizce kaçınılmaz olmaktadır. Bunu da bilerek gelmenizi, kendinizi geliştirmeniz gerekiyorsa geliştirmenizi öneririm. Son olarak yaptığınız bu işte maaş konusunda şu kadardır demek istemiyorum. Ticaride daha çok çalışıp karşılığını almak var, offshore da kısa zaman diliminde çalışıp karşılığını almak, bu açıdan kıyasladığınızda offshore'u daha tatminkâr bulacaksınız. Geçen yazımda da söylemiştim, hatırlatmak isterim, zabit olarak başladınız, hızlı bir şekilde 2. Kaptan veya Kaptanlık hayalleriniz varsa bu offshoreda çok zor bilmenizi isterim. Gerçekten çok şanslıyız ki ülkemizde bu yönde istihtam doğdu aksi takdirde dış piyasada bizlerin Türk olarak DP'li bir gemi bulup çalışmamız mucizeydi. Bu nedenle devletimizin bu alandaki büyük proje ve yatırımları ile bizler de gayret sarf ederek bu istihtam açığını liyakat sahibi insanlarla doldurarak, daha bilinçli bir şekilde yürüyeceğimize inanıyorum. Para her şekilde kazanılır ama ülkemiz ve geleceğimiz için bilgi ve paylaşım en değerli hazinemizdir. HAZIRLAYAN ÇAĞLAR ASLAN UZAKYOL 2. KAPTAN
0 notes
Text
DPS Konumlandırma Referans Sistemleri (UTM ve Uydu Sistemleri)
DPS KONUMLADIRMA REFERANS SİSTEMLERİ
BÖLÜM 5
Bu bölümde sizlere DP sistemi için son derece önemli olan Konumlandırma Referans Sistemleri hakkında önem arz eden noktalar üzerine değinmek istedim. Özellikle bu konu, hem DP sertifika sınavında birçok soru içeriğine sahip olduğu için hem de çalışma hayatımızda birçok yerde karşımıza çıkacağından ötürü, bilinmesi ehemmiyet göstermektedir.
Konumlandırma Referans Sistemleri:
1 UTM koordinat sistemi (The Universal Transverse Mercator)
2 Uydu Sistemleri GPS, DGPS ve Glonass
3 Hidroakustik Pozisyon Referans Sistemi HPR / Hipap
4 Artemis
5 Taut Wire
6 Fanbeam
7 RADius
1. Mevki tanımlaması için kullanılan referans koordinat (Datum) sistemi (UTM)
Mevki tanımlaması için kullanılan referans koordinat (Datum) sistemi, araştırma ve diğer açık deniz çalışmaları için yaygın olarak kullanılmaktadır. Daha çok DP ile ilgili seyir, UTM sistemine dayanmaktadır, bu nedenle burada bu sistem ile ilgili açıklama yapılacaktır.
UTM metre kuzeye ve doğuya dayalı grid bir sistemdir. Amaç, enlem, boylam ve gerçek kuzeye dayanan geleneksel Mercator projeksiyonunda mevcut olan bozulmayı azaltmaktır. UTM, Mercator gibi silindirik bir projeksiyondur ancak UTM'de silindirin ekseni ekvatorun düzlemi boyunca uzanır; silindir ve Küre arasındaki temas hattındaki bir meridyeni ve onun anti-meridyendir. Açıkçası, bu türün tek bir silindirik projeksiyonu, tüm karasal yüzeyi grafiklemek için kullanılamaz ve temas meridyeni ile çizilen alan arasındaki boylamda fark büyük olsaydı, bozulma da büyük olurdu.
Projeksiyonun önemli kapsamı, merkezi meridyen olarak bilinen temas meridyeni üzerine merkezlenir ve genişliği 6 derece boylam bölgesinden oluşur. Bu bölge içinde bozulmalar minimaldir. Bölgeler 180º meridyenler doğuya doğru numaralandırılmıştır. Böylece bölge 1, 180º ila 174º Batı arasında, 177º Batı üzerinde merkezi meridyen ile dağılır. Kuzey Denizi çoğunlukla bölge 31 (Greenwich-6º E, Orta meridyen 3ºE) içindedir.
Belirli bir bölge içinde, Northings ve Eastings (metre cinsinden), dünya üzerindeki konum ne olursa olsun, sırasıyla kuzeye ve doğuya doğru bir yönde artacak şekilde düzenlenmiştir. Northings için Datum ekvatordur, Kuzey Yarımküre Northings ekvatorda sıfır değerine sahip ve kuzeye doğru artmaktadır. Güney yarımkürede, ekvatorda 10.000.000'luk bir kuzeye kaydırma ( False Northing) değeri oluşur ve kuzeydeki değerler güneye doğru ilerledikçe azalır. Bu kaydırma ile, kuzeye doğru artması gereken pozitif değerler sorunu çözemeye yardımcı olur.
Eastings için, merkezi Meridyende sıfır değeri bulunur, ancak bu, merkezi Meridyenin batısındaki negatif değerlerle sonuçlanır. Bu sorunun üstesinden gelmek için merkez meridyen üzerinde 500.000 m Doğuya Kaydırma (False Easting) değeri oluşur ve Doğu değerleri doğu yönünde artar. Böylece, tüm bölgenin pozitif Doğu değerleri ile kapsanması sağlanır.
UTM grid bir sistem olduğu için meridyenlerin yakınsaması yoktur ve harita gerçek bir 90 derecelik Kare grid oluşturur. Bu nedenle, grid Kuzey ile gerçek Kuzey arasındaki yönde bir fark vardır ve bu farkın kendisi alan boyunca değişir. Merkez Meridyende fark sıfır olacaktır. DP çalışması için bu farkın bilinen bir değer olması ve ayrıca Artemis sabit istasyonlarının True veya Grid yerlerine kalibre edilip edilmemesi önemlidir. Kısa menzilli çalışma veya göreceli uzun menzilli çalışma için sorun yoktur, ancak Artemis referans kökeninden uzun bir mesafede bir DP gemisi tarafından çalişma yeri kuruluyorsa, Artemis koordinatları kullanıldığında, önemli konumsal hata ortaya çıkabilir.
Bir bölgeden (yani belirli bir merkezi meridyene dayanan) UTM koordinatlarının, başka bir merkezi meridyene dayanan aynı konum için koordinatlarla hiçbir şekilde eşleşmeyeceğini fark etmek önemlidir. Bir görevi planlarken, verilen tüm alan diyagramlarının ve planlarının aynı projeksiyon ve merkezi meridyen verilerine çizildiğini kontrol etmek gerekir.
1.1 UTM Koordinat Sistemi İçin Özelliklerin Seçilmesi
UTM koordinat sistemi seçildiğinde yan tarafta yer alan “UTM Properties” komut butonunun kliklenmesi ile açılan iletişim kutusu üzerinden UTM koordinat sistemi kullanımı için gereken parametreler girilebilir (UTM: “Universal Transverse Mercator” projeksiyon sistemi).
Şekil 1.1 UTM Koordinat Sistemi Özellikleri
“False Easting” (Doğu kaydırma): UTM seçildiğinde, koordinatların negatif değer olarak gösterilmesinden kaçınmak için, UTM mevkisinin Doğu/Batı tanımlama noktası için 500.000 metre kaydırma değeri (offset) girilebilir.
“False Northing” (Kuzey kaydırma): UTM mevkisinin Kuzey/Güney tanımlama noktası için 10.000.000 metre kaydırma değeri (offset) girilebilir, bu değer yaklaşık olarak ekvator ile Kuzey kutbu (UTM gridinde) arasındaki mesafeye eşittir. Bu sayede Kuzey yarımküredeki bir mevki için negatif koordinat gösterilmesinden kaçınılabilir. Kuzey kaydırma işlemi (False Northing) normal şartlarda sadece Güney Yarımküre için geçerlidir (uygulanabilir).
“Zone option”: UTM sahasının otomatik olarak coğrafi mevki hesaplamalarına göre tespit edilmesi için “Automatic zone calculation” kutucuğu işaretlenmelidir. Aksi takdirde sistem için gerekli olan UTM sahası “Zone” kısmından seçilmelidir. “Zone offset, mevki bilgisinden UTM sahası hesaplanırken boylam derecesine ilave edilecek sabit kaydırma değeridir. Sistemde UTM sahası için en fazla ±3º sabit kaydırma girilebilir.
K-Pos DP sistemi kontrol işlemcisi daime kendi içerisindeki coğrafi koordinat sistemini ve WGS84 datumu kullanır. Bu yüzden, WGS84 dışında bir datum kullanan tüm uydu mevki sistemlerinden alınan veriler sistem tarafından WGS84’e göre çevrime tabi tutulur. UTM formatında gelen mevki bilgileri de coğrafi koordinatlara çevrilir.
2. Uydu Sistemleri GPS, DGPS ve Glonass
2.1 Sisteme genel bakış
GPS sistemi üç bölümden oluşur:
- Uzay Segmenti
- Kontrol Segmenti
- Kullanıcı Segmenti
Uzay segmenti
Uzay segmenti, altı yörünge düzleminde (her düzlemde dört uydu) en az 24 operasyonel uydudan oluşur. Ek aktif yedek uydular normalde herhangi bir zamanda yaklaşık 27-30 operasyonel uyduya ulaşır. Eğim açısı (yörünge düzlemi ve Ekvator düzlemi arasındaki açı) 55 derecedir. Uydular yaklaşık 20200 km yüksekliğe sahiptir (26560 km yörünge yarıçapı). Yörünge hızı yaklaşık 14000km / s ve yörünge süresi yaklaşık 11 saat 58 dakikadır. Dünya uyduların altında döndüğü için, aynı uydu her 23 saat 56 dakikada bir dünya üzerinde aynı noktayı geçecektir. Uydular yörünge düzlemlerinde konumlandırılmıştır, böylece Dünya'daki bir GPS alıcısı normalde iyi bir geometrik ilişkiye sahip en az dört uyduya sahiptir. Uydular güneş enerjisi ile çalışır, ayrıca yedek bataryası vardır ve yaklaşık 10 yıl sürecek şekide inşa edilmiştir. Uydular yüksek hassasiyete sahip dört atom saati ile donatılmıştır. Ayrıca yörünge konumunu ayarlamak için küçük roket güçlendiricileri vardır
Kontrol segmenti
Kontrol segmenti şunlardan oluşur:
* Beş Monitör istasyonları (Ascension Island, Colorado Springs, Diego Garcia, Hawaii ve Kwajalein).
* Üç yer antenleri, Yukarı bağlantı istasyonları (Ascension Island, Diego Garcia ve Kwajalein).
* Bir ana kontrol İstasyonu (MCS) (Schriever Hava Kuvvetleri üssü, Colorado Springs bulunur).
İzleme istasyonları, her uydudan değişen verileri toplayarak, tüm uyduları sürekli olarak takip eder. Bu veriler doğrulama ve daha fazla işlem için ana kontrol istasyonuna (MCS) gönderilir. Düzeltilmiş bilgiler daha sonra uydulardan gönderilen navigasyon mesajını düzeltmek için Mcs'nin yer Antenlerinden biri aracılığıyla uydulara iletilebilir. MCS fonksiyonları ayrıca uydu istasyonu tutma manevralarının kontrolünü, yedek uyduların yeniden yapılandırılmasını ve diğer bakım faaliyetlerini de içerir.
Kullanıcı segmenti
Kullanıcı segmenti temel olarak karaya, denize ve havadan gelen kullanıcılara pozisyon, hız ve kesin zamanı hesaplayabilen ve sunabilen antenler ve alıcı işlemcilerden oluşur.
2.2 GPS hizmetleri
GPS iki hizmet seviyesi, standart konumlandırma hizmeti ve hassas konumlandırma hizmeti sağlar.
Standart konumlandırma hizmeti (SPS)
SPS, tüm GPS kullanıcılarına doğrudan bir ücret ödemeden ve sürekli, dünya çapında sunulacak olan bir konumlandırma ve zamanlama hizmetidir. 1 Mayıs 2000'e kadar, seçici kullanılabilirlik (SA) olarak bilinen hatalar giderilerek, SPS'nin doğruluğu yaklaşık 100 m yatay konumlandırmaya düşürüldü. Bununla birlikte, SA 1 Mayıs 2000'de kapatıldı ve standart konumlandırma servisinin (SPS) konum doğruluğu yaklaşık 10-15 metre, yani ( Dairesel hata olasılığı %95 düşürüldü), (CEP Circular Error Probability).
Hassas konumlandırma hizmeti (PPS)
PPS, ABD tarafından yetkilendirilen kullanıcılara sürekli olarak, dünya çapında hizmet sunacak olan son derece hassas bir askeri konumlandırma, hız ve zamanlama hizmetidir. PPS, yaklaşık 5-10m'lik öngörülebilir bir konumlandırma doğruluğu sağlar (%95 CEP).
2.3 Uydu Sinyali
Tüm GPS uyduları, L1=1575.42 MHz ve L2=1227.6 MHz olmak üzere iki taşıyıcı frekansta sinyal iletir. Yeni nesil uydular da L5=1176.45 MHz'de iletilecektir. Taşıyıcı frekansı tüm uydular için aynı olduğundan, sinyal, farklı uyduları birbirinden ayırmayı mümkün kılan özellikler içermelidir. Bu, sözde rastgele gürültü kodları (PRN kodları) olarak adlandırılan sinyallerdeki kodlar kullanılarak elde edilir. Bu kodlar her uydu için ayrıdır ve taşıyıcı frekansının üstünde modüle edilmiştir. Görünüşte bu kodlar yanlış, rastgele sesler gibi görünecek, dolayısıyla rastgele bir gürültü olacaktır. Farklı uyduları ayırmanın yanı sıra, mesafe hesaplamalarında PRN kodları da kullanılır. Bu bölümde daha sonra ele alınacaktır. Aşağıda açıklanan farklı türde sahte rastgele gürültü kodları vardır.
C / A-kodu
C / A-kodu (Coarse Acquisition code) standart konumlandırma hizmeti (SPS), sivil GPS kullanımı için uygundur. C / A-kodu, her 1 milisaniyede kendini tekrarlayan 1.023 MHz frekansına sahiptir. C / A kod dizisinin kısa uzunluğu, bir alıcının uydu sinyallerini hızla almasını sağlamak için tasarlanmıştır. C / A-kodu şifreli değildir ve bu nedenle GPS tüm kullanıcılar tarafından kullanılabilir. C / A-kodu L1 frekansında iletilir.
P (Y)-kod
P-kodu, hassas konumlandırma hizmetinin (PPS) temelidir. P-kodu askeri GPS kullanıcıları için şifreli bir koddur. P-kodu 10.23 MHz PRN kodudur. Ocak 1994'te, sıkışması daha da zor olan yeni bir kodla, Antispoofing modu (A-S) uygulandı. Bu kod y-kodu olarak adlandırılır ve anti-spoofing modu etkinleştirildiğinde P-kodunun yerini alır. Hassas konumlandırma hizmeti için kullanılan kod genellikle P(Y)-kodu olarak adlandırılır. P (Y)-kodu L1 ve L2 frekanslarında iletilir.
Uydudan iletilen veriler, bu benzersiz PRN kodlarından ve temelde uydunun konumunu, zamanını, atmosferik verilerini ve tüm aktif uydular hakkında bilgi veren bir almanak içeren navigasyon mesajından oluşur.
2.4 Konumlandırma Prensibi
Temel konumlandırma prensibi, farklı uydulardan gelen aralıkların üçgenleştirilmesine dayanır. Bir pozisyonu hesaplamak için normalde en az 4 uydu aralığı ölçülmelidir. Mesafeleri hesaplamak için, seyahat süresi bilinmelidir, (GPS alıcısından alınana kadar bir sinyalin bir uydu tarafından gönderildiği zaman). Bir uydudan gelen mesafe daha sonra, ışık hızının, yaklaşık 300.000 km/s olduğu ışık hızı ile (Mesafe = ışık hızı X seyahat süresi) Seyahat süresi çarpılarak hesaplanır. Mesafeleri kullanarak üçgenlemek için, uyduların konumlarının bilinmesi gerekir. Uydu konumu, uydulardan gönderilen navigasyon mesajının bir parçasıdır. Seyahat süresinin nasıl belirlendiği aşağıda açıklanmıştır.
Seyahat Süresi
Doğru Seyahat süresini ölçmek çok önemlidir. Örneğin; yalnızca bir milisaniyelik Seyahat süresinde bir hata varsa, bu 300 km aralığında bir hataya neden olur. Bu tür hatalar elbette kabul edilemez. Zaman ölçümü, hem uydu hem de alıcının aynı PRN kodunu tam olarak aynı anda ürettiği varsayımına dayanır. Seyahat süresi, uydu PRN kodunun alıcının koduna kıyasla ne kadar geç göründüğünü karşılaştırarak bulur
Uyduların yüksek hassasiyete sahip hassas dört atomik saati vardır ve tüm uydular bir GPS sistemi zamanıyla senkronize edilir. Alıcı olsa da, aynı doğru saate sahip değildir. Yukarıdaki prensip, prn kodunu tam olarak aynı anda üreten uydu ve alıcıya dayandığından, alıcıda da doğru bir zamana sahip olmamız gerekir. Bu alıcı saat ofseti, ekstra bir uydu aralığı ölçülerek düzeltilir. Bir pozisyonu hesaplamak, enlem, boylam, yükseklik ve alıcı saat ofsetini hesaplamak için en az dört uyduya ihtiyacımız olmasının nedeni budur.
2.5 Hata kaynakları
Sinyal doğruluğunu etkileyen çeşitli kaynaklar vardır:
Troposfer
Troposfer dünya atmosferinin alt kısmıdır. Bu, hava değişiklikleriyle ilişkili sıcaklık, basınç ve nem değişikliklerinin meydana geldiği yerdir. Bu faktörler sinyallerde değişen derecelerde gecikmelere neden olur.
İyonosfer
İyonosfer, 50 ila 500 km arasında değişen atmosfer tabakasıdır ve büyük ölçüde iyonize parçacıklardan oluşur ve bu da sinyallerde gecikmeye neden olur.
Çok yollu etkileri
Bunlar, uydudan düz çizgi yolunu takip eden sinyalle etkileşime girebilen veya karıştırılabilen alıcının yakınındaki yüzeylerden yansıyan sinyallerden kaynaklanır. Yansıyan sinyal çok güçlü ise, GPS alıcısı uydudaki kilidi gevşetebilir.
Çok yollu tespit etmek zordur ve bazen kaçınılması zordur.
Geometrinin etkileri
Temel geometri, diğer hataları, hassas - GDOP'UN geometrik Dilüsyonu olarak adlandırılan bir prensiple büyütebilir.
Kullanıcı uydulardan çizilen çizgilerin birbirine neredeyse dik olduğu bir noktada olduğunda, kesişme noktası iyi tanımlanır.
Açı ya çok büyük ya da çok küçük olduğunda, kesişme noktası bulanıklaşır ve konumlandırma bozulur.
Geometrinin etkileri, günün saatine ve mevcut uyduların sayısına göre değişir. Zayıf geometri, engellerden de kaynaklanabilir. Örneğin; bir gemi platform yapısına yakın olduğunda, düzeltme sinyalleri kolayca engellenebilir.
2.6 Hassas seyreltme (DOP)
Pozisyon hesaplaması temel geometridir. Uydular gözlemciye göre belirli konfigürasyonlarda olduğunda, küçük hataların büyütülmesi mümkündür. Hassaslığın seyreltilmesi (DOP), geometrinin hatayı ne kadar büyüttüğünü gösteren boyutsuz bir sayıdır.
DOP Kategorilere ayrılabilir:
* Yatay DOP (HDOP)
* Dikey DOP (VDOP)
* Geometrik DOP (GDOP)
* Zaman DOP (TDOP)
En sık kullanılan DOP değeri, Hdop ve Vdop kombinasyon halinde olan pozisyon DOP (PDOP) olarak adlandırılır.
2.7 Hasas Doğrulama için DP gereksinimleri
Hassas dinamik konumlandırma (DP) için bir geminin pozisyonunun çok hassas ölçümleri gereklidir. Standart GPS genellikle bir DP sistemine giriş olarak yeterince iyi değildir. GPS'in doğruluğunu geliştirmek için diferansiyel GPS (DGPS) kullanılır.
DGPS (Differential GPS)
Bir kıyı tabanlı referans istasyonu uydulardan GPS yayınları izleme methodu ile, bilinen bir yerde kurulmuştur. Referans istasyonları, bilinen konumları hesaplanan GPS konumuna karşı sürekli olarak karşılaştırır, her uydunun sinyallerindeki hataları hesaplar ve hata düzeltmelerini GPS kullanıcılarına iletir. Düzeltme mesajı formatı, Denizcilik hizmetleri için radyo teknik Komisyonu (RTCMSC104) tarafından belirlenen standardı takip eder.
Bir GPS sistemine ek olarak, kullanıcı için bir DGPS anteni ve bir DGPS alıcı ünitesi gerekir. Düzeltme sinyalleri farklı yöntemlerle alınabilir. Örneğin; IALA radyo bağlantısı (yaklaşık Aralık. 200 km) veya özel uydu sistemleri, Spotbeam veya Inmarsat (yaklaşık Aralık. 2000 km).
Bu diferansiyel düzeltmeler daha sonra hesaplamalar için kullanmadan önce geminin GPS alıcısı tarafından alınan sözde aralıkları düzeltmek için uygulanır, böylece uydu sinyal hatalarının çoğunu ortadan kaldırır ve doğruluğu arttırır.
Inmarsat kullanırken fugro SeaSTAR tarafından dağıtılan diferansiyel sinyaller için kapsama haritası.
IALA tarafından dağıtılan diferansiyeller sinyalleri için kapsama haritası. Deniz radyo işaret kuleleri kullanılır.
Bağıl konumlandırma-DARP (Differential Absolute & Relative Position Sensor)
Bazı DP fonksiyonları, sabit bir pozisyondan ziyade hareket eden bir teknenin konumlandırılmasını gerektirir. Bunun bir örneği, yüzen bir Shuttle Tankerin kıçından yükleme hortumu aracılığıyla diğer geminin başına doğru yüklenen bir DP Shuttle tankerinin çalışmasıdır. Gerekli ekstra ekipman UHF bağlantı anteni, UHF alıcı-verici istasyonu ve modemdir.
Göreceli bir konumun ölçümleri için, hatalar her iki gemi için de aynı olacağından, diferansiyel düzeltmeler kullanılmaz. Referans noktasına bir transponder yerleştirilir ve bu alınan GPS verilerini Shuttle Tankerdeki UHF alıcı-vericisine yeniden iletir. Shuttle Tankerdeki bir bilgisayar, her iki gemiden de GPS ölçümlerini kullanarak, DP sistemine pozisyon referansı olarak girilebilecek bir mesafe/kerteriz vektörü türetir ve sistem bu şekilde çalışır.
2.8 GLONASS
Küresel navigasyon Uydu Sistemi (GLONASS), Amerikan GPS sisteminin Rus muadilidir.
GLONASS uydu takımyıldızı, yörüngeler ve sinyal yapısı açısından NAVSTAR GPS ile çok ortak noktası vardır. GPS etkileyen tüm hatalar da GLONASS için geçerli olacaktır. GLONASS diferansiyel düzeltme sinyalleri ticari olarak ayrıca sunulmaktadır.
2010 yılına kadar GLONASS Rusya topraklarının tamamına ulaşmış ve 2011 yılı Ekim ayında, toplam 24 uydudan oluşan tüm yörünge takımları ile tam küresel kapsama alanına etkinleştirilmiştir. GLONASS uydularının, 2011'de başlayan ve 10 yıllık yaşam süresi olan
GLONASS-K
sürümü ile tasarımları, bir takım yükseltmeler içermektedir.
2.9 Mevki Konumlandırma Sisteminin (D-GPS) DPS Sistemi İçinde Kullanımı
DKS’nin mevki referans sistemi olarak kullanılan DPS 110, DGPS alıcısı, GPS ve DGPS antenlerinden oluşan yüksek performanslı bir mevki konumlandırma sistemidir. İçerisinde IALA ve DGNSS alıcılarını ihtiva eder. Bir metreden daha düşük hassasiyete sahip ve kullanımı ücretsiz olan IALA referans sistemi (transmitterleri) ve SBAS (WAAS/EGNOS/MSAS/GAGAN) sistemlerini kullanma kabiliyetine sahiptir. Bunların yanında abonelik gerektiren SeaSTAR SGG sistemini de kullanabilir (sabit referans istasyonlarından uzaklaştıkça mevki hassasiyeti düşmez, bu sistem tüm dünya çapında bir metreden daha düşük hassasiyette mevki bilgisi verebilir).
Sistemin genel özellikleri ve kabiliyetleri:
● Yüksek performanslı GPS (L1/L2) alıcısı
● SBAS imkanı
● IALA sabit istasyonlarını kullanma kapasitesi
● Bütünleşik L band alıcı ile Fugro SeaSTAR SGG imkanı
● İlave RTCM düzeltme girişi
● Birbirinden bağımsız GPS (GNSS) ve IALA antenleri
● Harici cihazları beslemek üzere kullanılabilecek arayüz
● İki satırlı entegre LCD ekran ve tuş takımı (sistem kurulumu ve durum izlemesi için)
● USB bağlantı noktası üzerinden kolaylıkla yazılım güncellenmesi
● Eternet bağlantısı (arayüz)
● 1 PPS çıkışı
DPS 110, GPS ve DGPS sinyallerini gerçek manada paralel işleme tabi tutarak hassas mevki bilgisi üretebilecek gelişmiş bir algoritmaya sahiptir. GPS-DGPS (SBAS, WAAS, EGNOS, MSAS ve GAGAN) sinyallerinin yanında IALA ve SeaSTAR SGG düzeltme sinyallerini de işleme dahil eder.
Pek çok kaynaktan gelen DGSP sinyalleri çok referanslı bir mevki bilgisi için birleştirilir. SeaSTAR düzeltmeleri bölgesel SBAS ve lokal DGPS bilgileri ile desteklenir (SeaSTAR SGG sistemi küresel olarak bir metreden daha düşük hassasiyette mevki bilgisi verebilir). DPS, DKS’nin diğer bileşenlerine de (cJoy Kumanda Sistemi ve HiPAP) mevki bilgisi gönderir.
Yukarda Dinamik Konumlandırma Sistemi için önem arz eden, Pozisyon Referans Sistemleri içinde olan UTM ve Uydu Sistemleri hakkında bilgi verdim. DP sertifikası sınavlarında bu konulardan çok soru geleceğini tekrar hatırlatarak, bu doğrultuda dikkatli okuyup anlamanızı tavsiye ederim.
Sonraki konularımızı başka bir bölümde elimden geldiğince aşağıdaki sırada anlatmaya calışacağım.
3. Hidroakustik Pozisyon Referans Sistemi HPR / Hipap
4. Artemis
5. Taut Wire
6. Fanbeam
7. RADius
HAZIRLAYAN
ÇAĞLAR ASLAN
UZAKYOL 2. KAPTAN
#dps#KonumlandırmaReferansSistemleri#DPsertifikasınavı#UTM#UniversalTransverseMercator#GPS#DGPS#Glonass#HidroakustikPozisyonReferansSistemleri#HPR#Hipap#Artemis#TautWire#Fambeam#Radius#Offshore#CaglarAslan#Caglar Aslan#Datum
0 notes
Text
cJoy Kumanda Sistemi İşlevi ve Çalışma Prensipleri
CJOY KUMANDA SİSTEMİ ÇALIŞMA PRENSİPLERİ
BÖLÜM 4
2.1 cJoy Kumanda Sistemi
Bu bölümde, DKS altında yer alan bağımsız bir sistem olan cJoy kumanda sisteminin fonksiyonel ve çalışma birimleri olarak ne gibi işleve sahip olduğunu, üzerinde yer alan kumanda kolu, ekran ve kontrol/fonksiyon butonları ile cJoy kumanda kolu sisteminin operatör arayüz birimi fonksiyonlarını nasıl yerine getirdiğini anlatmaya çalışacağim.
Şekil 2.15 cJoy Kumanda Sistemi Operatör Terminali (OT)
cJoy DP sistemi, (DKS, K-Pos DP) ilave bir ünitesi olarak gemiye monte edilmiş olup, DKS için uzaktan kumanda sistemi (remote control) olarak da görülebilir. Ancak cJoy DP sistemi K-Pos DP sisteminden tamamen bağımsız bir kontrol sistemidir. Her ne kadar DKS’ye ait KGK’yı (UPS) kullansa da hem besleme hem sensör hem de arayüz bağlantıları açısından tamamen bağımsız bir sistem olup, kendi başına tüm kontrol fonksiyonlarını yerine getirebilir. Bu açıdan bakıldığında DKS içerisinde K-Pos DP sisteminin bir yedeği olarak da değerlendirilebilir. cJoy DP sisteminin K-Pos Dp ile hiçbir bağlantısı ve arayüzü yoktur. Ana tahrik sistemi kumanda seçim anahtarının cJoy konumuna alınması ile iticileri kumanda edebilir. Söz konusu seçim anahtarının bir pozisyonu da K-Pos’dur. Bu kapsamda gemi ana tahrik sistemine (DKS olarak) ya K-Pos ya da cJoy üzerinden kumanda edilebilir.
cJoy DP sisteminin kendine ait kabineti, kontrol bilgisayarı ve sensör/referans sistemi arayüzleri mevcuttur ve bu arayüzler K-Pos’tan tamamen bağımsız olarak çalışır.
cJoy Dinamik Mevki Kontrol Sistemi (cJoy DP) manuel ve yarı otomatik olarak gemiye kumanda edebilen bir kontrol sistemidir. Manuel ve yarı otomatik kumandaya ilaveten tam otomatik kumanda özelliği mevcuttur.
Sistemin amacı, tek bir kumanda kolu (joystick) ile geminin ana tahrik sistemine komut göndererek, geminin pruvasını ve dönüşünü kontrol etmektir. Bu fonksiyonlara ilaveten otomatik pruva kontrolü, geminin dönüş merkezinin seçilmesi, geminin otomatik mevki kontrolü ve seçili rotada geminin seyretmesini sağlayan oto pilot fonksiyonları da mevcuttur.
cJoy konsolunda yer alan kumanda kolunun (joystick) kullanılmasıyla, gemi hareketlerine kumanda edilebilir. Kumanda kolunun sağa-sola veya kendi ekseni etrafında hareket ettirilmesi ile geminin üç eksendeki (ileri-tornistan, sağa-sola yatay ve pruvanın sancak-iskele hareketleri) ilerlemesi kontrol edilebilir.
Otomatik pruva kontrol modunda geminin pruvası sensörlerden gelen (cayro) verilere göre otomatik olarak sabit tutulurken, gemi mevkisi kumanda kolunun hareketleri ile manuel olarak kontrol edilebilir. Otomatik mevki kontrol modu seçildiğinde, geminin mevkisi sensörlerden (rüzgâr sensörü, DGPS, cayro) gelen veriler doğrultusunda sabit tutulur. Tanımlanan mevki veya pruva değerindeki sapmalar sistem tarafından otomatik olarak algılanır ve gerekli düzeltme hareketleri için geminin ana tahrik sistemine (iticiler) komut gönderilir.
Kalman Filtresi
cJoy DP sisteminde de geliştirilmiş Kalman filtresi kullanılarak geminin üç eksendeki hareketleri analiz edilerek sistem kontrolü için kullanılır.
Geliştirilmiş Kalman filtresi, birbirinden bağımsız üç yönde gemi hareketini (pruvanın sancak-iskele dönüşü, geminin ileri-tornistan ve yanal eksendeki hareketi) yaklaşık olarak tahmin eder. Bu hesaplamada gemiye etki eden diğer harici kuvvetleri de ayrıca hesaplar. Hesaplamalarda temel olarak geminin matematiksel modelini kullanır, geminin %100 gerçek durumunu yansıtmayan bu model, gerçeğe en yakın değere ulaşabilmek için devamlı olarak güncellenir. Gemi cayrosu ve
DGPS’inden gelen bilgiler ile gemi modelinden alınan bilgiler devamlı olarak mukayese edilir ve gemi modeli devamlı olarak güncellenir. Bu işlemler ve geliştirilmiş Kalman filtrenin çalışma prensibi aşağıdaki şekilde genel hatları ile gösterilmiştir:
Aşağıdaki şekilde cJoy kumanda sisteminin fonksiyonel blok diyagramı gösterilmiştir. Sistemin, kalman filtrenin ve matematiksel gemi modelinin çalışma fonksiyonları K-Pos sistemi ile aynıdır.
Şekil 2.16 cJoy DP Sistemi Fonksiyonel Blok Diyagramı
Sistemde yer alan kontrol kademesi, geminin talep edilen mevkisinin muhafaza edilebilmesi için iticiler tarafından uygulanması gereken itki gücünü hesaplar. Kontrol kademesi aşağıdaki temel fonksiyonları yerine getiren üç ana bölümden oluşur:
● Uygulanan itki gücü geri beslemesi: Operatör tarafından belirlenmiş mevki ve pruva değeri ile geminin gerçek mevki ve pruva değerleri arasındaki fark itki gücü geri besleme devrelerini çalıştırır. Benzer şekilde geminin hız/dönüş oranındaki farklar da dikkate alınır. Burada hesaplanan fark değerleri kazanç faktörü ile çarpılarak itki gücü talebi elde edilir. İtki gücü talebi, operatör girdilerine göre geminin istenilen noktada sabit tutulabilmesi (veya pruvasının sabit tutulabilmesi) maksadıyla iticilerin uygulaması gereken itki gücüdür. İtki gücü talebi, hem mevcut durumu muhafaza etmeye yönelik hem de karşı etki oluşturmaya yöneliktir (gemiyi istenilen mevkiye getirmek ve o mevkiye yaklaşıldığında gemi hareketini durdurmak).
● Rüzgâr etkisinin sönümlendirilmesi maksadıyla ilave besleme: Geminin rüzgârdan kaynaklı hareketlerine karşı itki gücü kullanılarak sönümlendirilmelidir. Bu maksatla ilave besleme konsepti kullanılır. Rüzgârın etkisinden dolayı gemiye etki eden kuvvetler rüzgârın ölçülmesi ile tahmin edilebilir ve bu ölçüm sonucu elde edilen (hesaplanan) rüzgâr etkileri anında karşı tedbirler ile sönümlendirilebilir. Rüzgârdan kaynaklanabilecek etkiler için gemi iticilerine normal itki taleplerine ilaveten itki talebi hesaplaması yapılır ve hesaplama sonucu elde edilen bu ilave itki talebi de sistem tarafından dikkate alınır. Bu sayede rüzgâr değerinin yönü ve şiddeti ölçülerek, gemi hareketlerine olabilecek olumsuz etkisi anında düzeltilir.
●Akıntı etkisinin sönümlendirilmesi maksadıyla ilave besleme: Rüzgâr dışında gemiye etki eden akıntı, dalga gibi harici etkenler de mevcuttur. Gemi mevkisindeki sapmalar zaman içerisinde detaylı bir hesaplamaya (hesaplama sonucu ölçüm elde edilir) tabi tutulur ve gemiye etki eden diğer harici güçler (deniz, dalga, akıntı) de belirlenebilir. Bu değerler tahmini değerler olup iticilere gönderilecek itki gücü talebinin hesaplanmasında dikkate alınır.
Kontrol sistemi tarafından yapılan hesaplamalar sonucu itki gücü talepleri itici seçim kademesine gönderilir. İtici seçimleri K-Pos DP sisteminde olduğu gibidir.
cJoy DP sisteminin ana çalışma modları:
● Bekleme modu (Standby),
● Kumanda Kolu Modu (Joystick),
● Mevki Muhafaza Modu (Station Keeping),
● Oto Pilot (Autopilot).
cJoy DP Sistemi Bekleme Modu (Standby)
Bekleme modu geminin iticilerine herhangi bir komutun gönderilemeyeceği, sistemin hazırlık konumunda olduğu ve sistemin yeniden başlatıldığı (reset) bir moddur. Bekleme modu aynı zamanda sistemin devreye alındığında başlangıç konumudur (default mode).
Bekleme modunda, sistemin kullanılması maksadıyla gerekli ön hazırlıklar yapılabilir ve ön hazırlıkları müteakip sistem normal çalışma moduna (kumanda kolu modu) alınabilir.
NOT
cJoy sisteminin bekleme modundan çalışma moduna alınmasıyla, otomatik olarak iticiler 10 saniyelik bekleme periyodunu mütakip kullanılabilir.
Bekleme modunda ayrıca aşağıdaki fonksiyonlar icra edilebilir:
● Kumanda kolunun kalibrasyonu.
● Çalışma için gerekli olan ana tahrik sistemi elemanlarının kullanıma alınması (iticiler).
● Cayro girişinin kullanıma alınması.
● Rüzgâr sensörünün kullanıma alınması.
● Mevki referans sensörünün (DGPS) kullanıma alınması.
NOT
CJoy DP sistemi mevki referans sensörünün kullanıma alınması durumunda, kumanda kolu moduna geçilene dek kalibrasyon yapılmaz.
cJoy DP Sistemi Kumanda Kolu Modu
Kumanda kolu modunda, konsol üzerine monteli kumanda kolu vasıtasıyla (joystick) geminin üç eksenli hareketleri (ileri-tornistan, sağa-sola yatay, pruvanın sancak-iskele) kontrol edilebilir.
Aşağıdaki şekilde kumanda kolunun bulunduğu konsolun geminin pruva istikametine baktığı varsayılarak gemi hareketlerine kumanda yönleri gösterilmiştir.
Şekil 2.17 Geminin 3 Eksenli Hareketleri ve Kumanda Kolunun Fonksiyonları
Kumanda kolunun farklı mevkilere monte edilmesi durumunda, fonksiyonları aşağıdaki şekilde gösterilmiştir. Kumanda kolunun kendi ekseni etrafında çevrilmesi daima geminin pruvasının sancak-iskele hareketini kontrol eder.
Şekil 2.18 Kumanda Konsolu Montaj Yönüne Bağlı Olarak Kumanda Kolu Fonksiyonları
Kumanda kolu modu nispi olarak çalışabilir bu yüzden kumanda kolu modunda cJoy DP sistemine cayro girişi ve mevki referans sensör girişi zorunlu değildir. Kumanda kolu modunda çalışılırken cayro ve mevki referans sensörlerinden giriş alınabiliyor ise geminin üç eksenli hareketinden bir yada ikisi otomatik kumanda edilebilecek şekilde seçim yapılabilir.
Bu çalışma yöntemi kumanda Kolu/Otomatik karma çalışma modu olarak isimlendirilir.
Karma mod aşağıdaki fonksiyonları içerir:
● Pruva hareketleri otomatik (Auto Heading) seçilmiş ise geminin yanal hareketleri ve ileri/tornistan hareketlerine kumanda kolu üzerinde komut verilir. Bu durumda pruva cJoy DP sistemi tarafından otomatik takiptedir.
● Yanal hareket ve ileri tornistan hareketi otomatik (Auto Surge, Auto Sway): Geminin mevkisi sistem tarafından otomatik olarak sabit tutulur, sadece pruvaya kumanda kolu üzerinden komut verilebilir (manuel Heading).
● Otomatik pruva takip, Otomatik İleri/Tornistan (Auto heading, Auto Surge): İleri/Tornistan eksenindeki hareket ve gemi pruvası sistem tarafından otomatik olarak kontrol edilir operatör sadece yanal hareket için kumanda kolu ile komut gönderebilir (Manuel Sway).
● Otomatik pruva takip, otomatik yanal hareket (Auto Heading, Auto Sway): Yanal hareket ve gemi pruvası sistem tarafından otomatik olarak kontrol edilir operatör sadece ileri/tornistan yönündeki hareket için kumanda kolu ile komut gönderebilir (Manuel Surge).
Her üç eksendeki hareket için de otomatik kontrol seçilirse sistem direk olarak otomatik mevki kontrol (mevki muhafaza) moduna geçer.
cJoy DP Sistemi Mevki Muhafaza Modu (Otomatik Mevki Kontrol)
Otomatik mevki kontrol modunun kullanılabilmesi için cJoy DP sistemine cayro ve mevki referans sistemlerinden geçerli ve kullanılabilir veri akışının sağlanması gerekir. Bu modda geminin pruvası ve mevkisi otomatik olarak muhafaza edilir (sabit tutulur).
Otomatik kontrol modunda kullanıcı tarafından limit değerler tanımlanabilir ve gemi mevkisi yada pruvası belirlenen limitler dışına çıktığında alarm/uyarı verilir.
cJoy DP Sistemi Oto Pilot Modu
Oto pilot modunda, kullanıcı tarafından girilen pruva değeri hassas bir şekilde cJoy DP sistemi tarafından otomatik olarak sabit tutulur. Bu modda geminin ana iticilerine (tünel iticiler hariç) komut gönderilir. Gemi sürati ise kumanda kolu üzerinden operatör tarafından ayarlanabilir.
Bu moda geçildiğinde kullanılan dönüş merkezi gerçek dönüş merkezi (geminin orta noktası) değil ise, sistem otomatik olarak geminin gerçek dönüş merkezini kullanmaya başlar ve kontrol panelde ilgili gösterge lambası (Center Pivot) yanarak operatöre bilgi verilir.
Bu modun kullanılabilmesi için sisteme bağlı her iki cayro sensör girişinin de aktif olması gerekir. Şayet bu şart yerine getirilmemiş ise operatöre ikinci bir cayro girişinin aktif olmasının gereğine ilişkin bir uyarı mesajı (Heading Monitor requires 2nd source) verilir.
Benzer şekilde en az bir sürat sensörü de aktif olmalıdır. Sürat sensör girişi aktif değilse yine operatöre uyarı mesajı verilir (Speed sensor dropout).
Oto pilot modunda çalışılırken pruva kontrolü otomatikten manuele alınabilir ve kumanda kolu ile pruvaya kumanda edilebilir. Yeniden oto pilot moduna geçebilmek için sisteme tanımlanmış pruva değerine geminin pruvası getirilmeli ve tekrar oto pilot modu aktive edilmelidir.
Oto pilot modunda aşağıdaki fonksiyon/seçimler yapılabilir:
● Kazanç (Gain): Düşük (%50), orta (%100) ve yüksek (%150) olmak üzere üç farklı seçim yapılabilir. Geminin karakteristik özelliklerine bağlı olarak uygun kazanç oranı seçilebilir. Pruva takibinin hassas bir şekilde yapılabilmesi maksadıyla ihtiyaç duyulan itki gücü ve ivmenin sağlanabilmesine yönelik olarak, pruva değerindeki sapma ve dönüş oranı seçili kazanç oranı ile çarpılarak hesaplama yapılır (matematiksel gemi modelinde). Kazanç oranı geminin karakteristik değerleri, hava durumu ve rota sabitlenmesinde beklenen hassasiyete bağlı olarak seçilmelidir. Yüksek kazanç oranı hassas manevralar için ani ve süratli reaksiyon gösterilmesini sağlar. Orta seviyedeki kazanç oranı seçildiğinde geminin sapmalara karşı göstereceği tepki, yüksek kazanç oranına nazaran daha yavaş olacaktır. Düşük kazanç oranı da geminin rotadan sapmalara karşı en düşük tepki hızını seçer.
● Ters dümen basma kazanç değeri (Counter Rudder Gain): %50 ile %150 arasında seçilebilir (başlangıç seçimi %100). Bu ayar sayesinde rotada yapılan önemli miktardaki bir değişiklikte yeni rotaya geçişin yumuşak bir şekilde yapılması sağlanabilir veya, geminin düz bir rota hattında dengeli bir şekilde tutulması sağlanabilir. Ters dümen basma kazanç değeri gereğinden düşük seçilmiş ise büyük rota değişimlerinden sonra geminin yeni rotaya dengeli bir şekilde oturması uzun süre alabilir. Ters dümen kazanç oranı gereğinden yüksek seçilmiş ise, yeni rota değerine gelindiğinde sistem aşırı tepki göstererek ani geri sapmalar yapar ve bu da yeni rota hattında salınımlara sebep olur. Ters dümen basma kazanç değerinin uygun seçilmediği durumlar aşağıdaki şekilde gösterilmiştir.
Şekil 2.27 cJoy DP Sistemi Otopilot Modu Ters Dümen Basma Kazanç Değeri
● Otomatik trim kazanç değeri: %50 ile %150 arasında seçilebilir (başlangıç seçimi %100). Bu ayar sayesinde hava durumundan (harici etkenler) kaynaklanan rotadan sapmalara karşı sistemin göstereceği reaksiyon hızı belirlenebilir. Otomatik trim kazanç değeri en düşük konumda ise (%50) statik rota sapmalarına karşı sistem yavaş reaksiyon gösterir. Bu değer en yüksekte seçilmiş ise statik rota sapmalarına karşı sistem daha hızlı reaksiyon gösterir.
● Rüzgâr etkisinin sönümlendirilmesi: Bu seçenek aktif yada pasif yapılabilir. Aktif seçilmesi durumunda rüzgârın yön ve şiddetindeki değişmelerde sistem süratli bir şekilde tepki verir (anında müdahale ederek iticilere komut gönderir).
● Dönüş oranı seçimi (ROT): Pruva değerinde bir değişiklik yapıldığında, yeni rotaya geçiş için kullanılacak dönüş oranını belirler (dakikada kaç derecelik bir dönüş yapılacağı).
● Otomatik rota takibi için müsaade edilen azami dümen basma açısı (iticilerinin azimut açısı): Burada tanımlanan değerden daha fazla dümen açısı uygulanmaz. Doğal olarak yüksek süratlerde düşük dümen açısı limiti girilmelidir (örneğin 5º). Sistemde önceden tanımlanmış (girişine müsaade edilmiş azami değerler) limit değerlerinden daha fazla bir değer seçilmesidurumunda bir uyarı mesajı verilir.
● Kumanda kolu ile pruvanın kontrol edildiği durumlar için dümen basma açısı limit değeri (iticilerin azimut açısı): Otopilot modunda kumanda kolu kullanıldığında, iticilerin azimut açıları burada girilen limit değerlerden daha fazla olamaz. Normal şartlarda oto pilot modunda kumanda kolu kullanılmaz, ancak acil bir durum ortaya çıktığında geminin pruvasına elle kumanda edilir, bu kapsamda buraya girilecek değer acil bir durum karşısında en yüksek dönüş etkisinin sağlanabilmesi için yüksek olmalıdır (örneğin iticilerin en yüksek azimut açısı veya 45º). Bu limit değer için iticilerin en yüksek azimut açısından daha yüksek bir değer seçilirse ekrana bir uyarı mesajı gelir.
● Dümen seçimi (dönüş işlemi için kullanılacak iticilerin seçimi): Geminin dönüşü için hangi dönüş iticilerinin kullanılacağı seçilir. Senkron (Synchron) seçildiğinde tüm azimut iticileri aynı açıda döndürülür. Otomatik asenkron seçildiğinde, (Async Auto) dönüş yönüne bağlı olarak otomatik seçilmek kaydıyla sadece tek bir itici döndürülür. İskele ve sancak asenkron (Async STB, Async PORT) seçimde ise dümen etkisi için sadece sancak veya iskele itici döndürülür. Asenkron seçimlerde dönüş için kullanılmayan itici ileri yol verecek şekilde sabit kalır.
● Dönüş grubu seçimi (Steering Group): Geminin dönüş hareketi için azimut iticilerin önceden tanımlanmış grupları seçilebilir. Seçili grup iticiler dönüş için kullanılırken diğer iticiler sabit kalır.
cJoy Kumanda Sistemi çalışma prenspleri ile ilgili biraz detaylı bilgi vermek istedim. Bu sistemi ben, çalıştığım gemilerde aktif olarak kullanmadım ama K-Pos DP Sistemini yedekleyen ve K-Pos DP Sisteminden tamamen bağımsız çalışan bir sistem olduğu için acil bir durumda bilinmesi ehemmiyet göstermektedir. Bu bakımdan detaylı incelemenizi tavsiye ederim.
HAZIRLAYAN
ÇAĞLAR ASLAN
UZAKYOL 2. KAPTAN
0 notes
Text
2011 yılında İstanbul Teknik Üniversitesi ve SUNY Maritime College ile ortaklaşa yürütülen lisans programından mezun oldum. Mezuniyetimden sonra 4. Kaptan olarak Tanker Gemisinde ilk çalışma hayatına adım attım. Akabinde 3. ve 4. Kaptan olarak çeşitli ticari faaliyet yürüten Tanker ve Powerplant gemilerde aktif olarak çalıştım. 2016 yılında denizcilikte faaliyet alanımı değiştirerek, devletimizin yürüttüğü enerji politikaları doğrultusunda offshore sektöründe çalışma fırsatı yakaladım. O zaman TP Genel Müdürlüğü'ne ait olan Barbaros Hayreddin Paşa Sismik Araştırma Gemisi'nde 3. ve 4. Kaptan olarak görev yapmaya başladım. Bu süreç araştırma gemisinde deneyim kazanmam için çok iyi bir fırsat oldu ve neticesinde Dinamik Konumlandırma (Dynamic Positioning) sertifika eğitimimi başarı ile tamamlayip, Limitsiz Dinamik Konumlandırma Operatörü (Unlimited DPO) sertifikasını almaya hak kazandım. Denizcilikte aktif çalışırken, ikinci bir eğitim şansı yakalamak zor olsa da Açık Öğretim Fakültesi Adalet Bölümü programını tamamlamak üzereyim ve hedefim Hukuk Fakültesine geçiş yapıp, başarı ile mezun olabilmektir. 2018 yılında başladığım, MTA Genel Müdürlüğü'ne ait olan Oruç Reis Araştırma Gemisi'nde 2019 yılından bu yana 2. Kaptan/SDPO olarak görevime devam etmekteyim.

#hakkımda#kaptan#gemi#blog#dinamikkonumlandırma#offshore#dpplatform#dpo#merakedilenler#denizcilik#Caglar Aslan
0 notes
Text
Yeni Offshore Programı Kapsamında Güncel Sorular ve Cevaplar
YENİ OFFSHORE PROGRAMI KAPSAMINDA SORULAR VE CEVAPLAR
DP sertifikasına başvuru sürecinde olan veya DP sertifikası olupta yapılması gerekenler konusunda, soru ve cevap şeklinde aklınıza takılabilecek her konu hakkında, Yeni Offshore Programına uygun olarak bilgilerimi sizlerle paylaşmak istiyorum.
Eğitimime 2014 yılında başladım. Yeni offshore programına aktarabilir miyim?
Hayır. Eski düzende başlayan herkes eski programa devam edecektir. Sadece 1 Ocak 2015'ten sonra başlayanlar yeni staj defteri alacak ve yeni programın gerektirdiği şekilde devam edecektir.
Üzerinden beş yıl geçen Temel Kursumu tekrarlamak istiyorum. Yeni programa uygun bir staj defteri mi almalıyım?
Hayır. Temel kursunuzu tekrarlamanız gerekiyorsa ve eski Mavi/Yeşil küçük staj defterine sahipseniz, sayfa 9’daki ek temel kurs bölümü mühürlenmelidir. Hem siyah A5 staj defteri hem de yeni gri staj defteri, kurs bilgilerinin mevcut olduğu alan eğitim merkezi tarafından doldurulacaktır.
DP eğitimimi tamamlamak için neden sadece dört yılım var?
Sertifika için gerekli olan DP süresinin azaltılmasıyla yeni program doğrultusunda eğitim süresi sınırı beş yıldan dört yıla indirilmiştir.
Sınırlı / sınırsız sertifika alabilmek için sınıflandırılmış ve sınıflandırılmamış DP zamanımı beraber kullanabilir miyim?
Hayır. Sınırlı veya sınırsız bir sertifika almaya çalışıyorsanız, sınıflandırılmış bir gemide 120 DP deniz süresini tamamlamanız gerekir. Sınıflandırılmamış DP sertifikası almaya çalışıyorsanız, sınıflandırılmamış bir gemide 120 DP deniz süresini tamamlamanız gerekir.
İhtiyacım olan deniz zamanı süremi azaltabilir miyim?
Evet. Yeni Offshore programında, Deniz süresi azaltma kursu alarak gereken süreyi azaltabilir yalnız bu kurs sadece simülatör kursundan sonra yapılabilir ve ardından, sınıflandırılmış bir DP gemisinde 30 DP deniz zamanı gününe sahip olmalısın.
Aktif ve pasif zaman nedir?
Aktif- NI sertifikalı bir DPO rehberliğinde geminin ana itici sistemi kullanılıyorken
Gemiyi kontrol etmek için DP sistemini kullanma,
DP ayarlarını yapma,
DP işlemleri ile birlikte görev bölümlerini tamamlama,
Fmea, yıllık, sınıf, charter, Alan varış ve DP aktif kullanma denemeleri,
En kötü durum senaryosundan sonra sadece mevcut iticileri kullanarak manuel kontrolleri ile acil gemiyi kontrol etme eğitimi yapılmış olmalı.
Pasif- NI sertifikalı bir DPO rehberliğinde ana itici sistemi olmadan
DP'de simülatör modu olan bir gemide yerleşik gemi tabanlı DP simülatörü eğitimi veya bağımsız bir DP simülatörü.
Bir NI sertifikalı DPO tarafından görev bölümleri eğitim ve değerlendirmeler yapılmalı ve kaptan tarafından imzalanmalıdır.
Shuttle Tanker Sınırlı Sertifika başvurumu yapmam için ne yapmam gerekiyor?
Program aşamaları takip edilmeli ve aşağıdaki sırayla tamamlanmalıdır:
Temel kurs
60 gün deniz hizmeti ve tüm görev bölümlerinin tamamlanması
Simülatör kursu
60 gün deniz hizmet kursu A, B veya C
Uygunluk beyanı belgesi.
Aşamalar tamamlandığında, deniz hizmet süresinin şirket tarafından onaylı bir mektubu alınmalıdır.
Bu mektup için şablon NI web sitemizde mevcuttur.
Görev bölümlerini ne zaman tamamlamam gerekiyor?
Staj defterinin görev bölümü, yeni Offshore eğitim programının B aşaması sırasında tamamlanmalıdır. Görevler tamamlanmazsa, simülatör kursuna katılmanıza izin verilmeyecektir.
Faz B sırasında imzalanan görevler olmadan gönderilen herhangi bir evrak, yeniden başlatılmak zorunda kalacak ve bölüm B’de bulunan eğitim ve sonraki tüm aşamaları tekrar tamamlandırılacaktır.
Görev bölümünü kimin imzalaması gerekiyor?
Her bir görev öğesi, gemide bulunan ve seni denetlemekle görevlendirilen sertifikalı bir DPO tarafından tamamlanmalı ve imzalanmalıdır. Eğer gemide Master atanmış sertifikalı DPO ise yine de her öğeyi ayrı ayrı tamamlaması ve imzalaması gerekir. Master ayrıca her görev bölümünün sonunda Master işaretli yeri tamamlamalı ve imzalamalıdır.
DP deniz hizmetimi kimin imzalaması gerekir?
DP deniz hizmetiniz gemi kaptanı tarafından imzalanmalıdır. Her yazılan DP deniz hizmeti kaydı, sayfanın altında ayrıntıları ve imzası görünen aynı kaptan tarafından her bir sayfa ayrı ayrı doldurulmalıdır. Eğer bütün girişler imzalanmaz ise 120 günlük DP deniz hizmet süresi sayılmayacaktır.
Nasıl başvurabilirim?
Belgelerinizi Denizcilik Enstitüsü (NI) ofisine göndermeden önce çevrimiçi başvurmanız gerekecektir. Lütfen online başvuru kılavuzu için yardım bölümünü kontrol edin.
Staj defterinin görev bölümü nedir?
Yeni Offshore programı kapsamında, bireysel görevlerle birlikte staj defterindeki görevler 11 bölüm olarak belirlendi. Bu görevlerin hepsi simülatör kursuna katılmadan önce tamamlanmalıdır. Simülatör kursuna katılmadan önce görevler tamamlanmazsa, başvuru sahibi eğitimi faz 2’den yeniden başlatmak zorunda kalacak.
Sınırlı olan sertifikamı sınırsıza nasıl yükseltebilirim?
Sınırlı bir sertifikadan Sınırsız bir sertifikaya yükseltmek için en az 60 DP 2/3 bir gemide deniz hizmeti gereklidir. Bu süre sınırlı sertifikanın onaylandığı tarihinden sonra tamamlanmalıdır ve DP2 veya DP3 olarak sınıflandırılmış bir gemide olmalıdır. Hizmet sonunda NI staj defterinde bu amaç için ayrılmış uygunluk durum formu da doldurulmalıdır. Ayrıca sertifika yükseltmek için 60 DP 2/3 bir gemide deniz hizmeti şirket tarafından onaylatılarak onay mektubu alınmalı ve NI ofisine belgeleri göndermeden önce başvuru çevrimiçi olarak tamamlanmalıdır.
Sınıflandırılmamış olan sertifikamı, sınırlı / sınırsız sertifikaya nasıl yükseltebilirim?
Sınıflandırılmış bir DP gemisinde ek bir 90 DP deniz hizmeti günlerini tamamlamanız gerekecektir. Bu ilk başvuru için gerekli minimum aktif süreye eşdeğerdir. Yeni uygunluk durum belgesi bu sürenin sonunda imzalanarak, şirketinizden bu hizmet sürelerinin onayı için bir onay mektubu almanız gerekmektedir.
Eğitim kursundan sonra sınavı tamamlamak zorunda mıyım?
Evet. Temel eğitim kurs sınavı 2012'den beri devam ediyor ve ardından yeni Offshore programı için simülatör kursu alınması gerekiyor.
Sınavda başarısız olursam ne olur?
Temel kurs sınavı başarısız olursa, dersi tekrar almak için iki ek sınav şansınız daha olacaktır. ilk olarak temel kursun alındığı aynı Eğitim Merkezinde 24 saat içinde sınava tekrar girebilirsiniz. Eğer bu ikinci girişim başarısız olursa sınavı tekrar almak için altı ayınız daha olacak ve bu herhangi bir zamanda farklı Eğitim Merkezinde yapılabilir.
Simülatör Kursu pratik değerlendirmesi başarısız olursa, sadece bir girişime izin verildiği için simülatör kursunu tekrarlamanız gerekir.
Simülatör kursu çevrimiçi değerlendirme sınavı başarısız olursa (bu sadece pratik değerlendirme geçtiğinde alınır) dersi tekrar almak için iki ek şansınız olacaktır. Birincisi, simülatör kursunun alındığı aynı Eğitim Merkezinde 24 saat içinde. İkinci deneme başarısız olursa, sınavı tekrar almak için Altı ayınız var ve bu herhangi bir Eğitim Merkezinde yapılabilir.
NI (Denizcilik Enstitüsü) staj defterlerini ve görev bölümlerini nasıl doğrulayacak?
Görev bölümlerindeki tarihler, geminin giriş ve çıkış tarihlerine ve DP staj defterine kaydedilen tarihlere göre doğrulanacaktır. Aktif zamanda tamamlanması gereken görevler, DP defterinde günde en az iki saat olan DP günü olarak staj defterine kaydedilen günlerle eşleşmelidir.
DP gün olarak ne sayılır?
Eğer Ocak 1 " 2015’den sonra başladıysanız, yeni Offshore programı üzerine girilecek. Bu, bir DP gününün günde DP defterinde iki saat olarak sayıldığı anlamına gelir.
Temel eğitim kursumdan önce sertifikamı başvuru için kullanabilir miyim?
Hayır. Yeni programda, temel eğitim kursundan önce tamamlanan süre başvuru için kullanılamaz.
Staj defterim NI ofisinde iken DP süremi saydırabilir miyim?
Hayır. Eğer staj defterin elindeyse, DP süreni yazabilirsin.
Sertifikamı yükseltmek için deniz hizmeti azaltma kursuna katılabilir miyim?
Hayır. Sınırlı bir sertifikayı yükseltmek için, en az 60 DP2 veya DP3 olan bir gemide günlerini ve ardından yeni bir Uygunluk Beyanı tamamlamanız gerekir.
Sertifikamın onaylanması için kaç gün tamamlamam gerekiyor?
Yeni Offshore programında 120 DP gün gerekir. Talep ettiğiniz herhangi bir süre için DP defterinde en az 2 saat tamamlamanız gerektiğini lütfen unutmayın. Bu, önceki programdan farklıdır.
Staj defterime kaydedilmemiş zamanı kullanabilir miyim?
Hayır. Başvuruda kullanılacak tüm DP deniz zamanı NI defterine kaydedilmelidir. NI defterine kaydedilmemiş başvuruda kullanılan herhangi bir zaman sertifikaya sayılmaz ve başvurunuzun reddedilmesine neden olabilir.
Staj defterimde imzalanmamış bir giriş var. Ne yapmalıyım?
Girişin imzalanması için o zaman diliminde geminin kaptanıyla iletişime geçmeniz gerekir. Staj defterindeki gemi damgasının ve kaptan imzasını eksik olduğu kayıtlar başvuruya yönelik olarak sayılmayacaktır.
Offshore programına başlamak için minimum gereksinimler nelerdir?
Stcw Sözleşmesi ve kodunda 2010 Manila değişikliklerini takiben, DP operatörleri Eğitim programına giriş için aşağıdaki kriterler uygulanmıştır:
Minimum yeterlilik Stcw Yönetmeliği II/1 - II/2 - II/3 güverte, Yönetmelik III/1 - III /2 - 111/3 - III / 6 makine ve III/6 ETOs için düzenleme olarak belirlenmiştir.
STCW Açıklama II/1 Güverte 500 GRT veya daha fazla gemilerde vardiya zabiti. II/2 Güverte 3.000 GRT veya daha fazla gemilerde Kaptan ve 2. Kaptan. II/3 Güverte Vardiya zabitleri ve 500 GRT’dan daha az gemilerde Kaptanlar III/1 Makine Makine kontrol odasında devamlı olarak duran vardiya mühendisleri veya periyodik olarak duran görevli vardiya mühendisleri III/2 Makine 3, 000kW Makine gücü veya daha fazla ana tahrik makinesiyle çalışan gemilerde başmühendis ve 2. mühendis III/3 Makine 750kw ve 3, 000kW tahrik gücü arasındaki ana tahrik makineleriyle çalışan gemilerde başmühendis ve 2. mühendis. III/6 ETO Elektro-Teknik Zabiti
Alternatif uygun deniz mesleki nitelikleri (MVQs) (marine vocational qualifications) olay bazında değerlendirilecektir. Denizcilik Enstitüsü, bir (MVQs) 'yi, yalnızca idarenin yerel sularında kullanılmak üzere beyaz liste Denizcilik İdaresi tarafından verilen Stcw olmayan bir yeterlilik belgesi olarak tanımlar.
Eğitim gören stajyerleri (tanımlanmış bir eğitim programına ilişkin sınıflandırır veya stajyer olarak görür)
İlk STCW veya MVQ sertifikası için eğitim sürecinde olan aday DPO, DP programını başlatabilir ve temel kursunu, 30 gün DP deniz hizmeti ve görev bölümlerini veya Shuttle tanker programının 2. aşamasını tamamlayabilir.
Offshore programı: adayın uygun bir yeterlilik veya yeterlilik belgesine sahip olması durumunda, B aşamasından (Offshore programı) kalan 30 gün DP deniz süresi tamamlanacaktır. DP deniz hizmetini tamamladıktan sonra, aday simülatör kursuna kayıt olabilir ve daha sonra D aşamasında kalan 60 günü tamamlayabilir.
Sertifikamın geçerlilik tarihi olacak mı?
Evet. Denizcilik Enstitüsü artık tüm sertifikalarda geçerlilik tarihi veriyor. Sertifika beş yıllık bir süre için geçerli olacaktır. Beş yılın sonunda, bu sertifikayı yeniden yenilemeniz gerekecek. Lütfen beş yıl boyunca, yeniden yenilemeniz için kullanıma hazır DP zamanınızı kaydettiğinizden emin olun.
Şirketim onay mektubu vermiyor. Ne yapmalıyım?
Ne yazık ki bir başvuru için talep edilen tüm deniz zamanı şirketten gelen bir mektupta teyit edilmesi gerekiyor. Onay mektubu olmadan DP süreleriniz kullanılamaz. Bu mektubu elde edemezseniz, DP deniz hizmetine yeniden başlamanız gerekecektir.
Başvuru maliyeti ne kadar olacak?
2 Ocak 2015 tarihinden itibaren DP sertifika belgesi başvuruları £115 (+KDV) olacaktır. Bu maliyet, belgelerinizin işlenmesini ve kurye ile belgelerinizin geri gönderilmesini içerir.
Elimden geldiğince aklınıza takılabilecek her konu hakkında soru-cevap şeklinde bilgilerimi paylaşmaya çalıştım. Bu soruların dışında aklınıza takılan konular olursa yardımcı olmaya çalışırım.
HAZIRLAYAN
ÇAĞLAR ASLAN
UZAKYOL 2. KAPTAN
0 notes
Photo

0 notes
Text
Dinamik Konumlandırma Sistemi Bütünleşik (Built-in) Donanımlar
DKS OPERATÖR İŞ İSTASYONUNDA NE GİBİ DONANIMLAR VAR ONLARA KISACA DEĞİNELİM
BÖLÜM 3
1.2 Bütünleşik Operatör İş İstasyonu (OS)
Şekil 1.6 Bütünleşik Operatör İş İstasyonu (OS)
Operatör iş istasyonu DKS fonksiyonları için kullanıcı (operatör) arayüzlerini içeren elemanlardan oluşur. Operatör iş istasyonu üzerinde yer alan arayüzler (ekran, klavye, kontrol paneli) vasıtasıyla DKS kontrol işlemci istasyonuna kumanda edilir veya bu istasyondan gelen veriler izlenebilir. İş istasyonu sistemin kullanıcı arayüz birimidir. İş istasyonunda yer alan bilgisayarda DKS fonksiyonlarına ilişkin bir yazılım olsa da bu yazılım DKS kumanda fonksiyonları için kullanılmaz, eğitim ve simülasyon maksadıyla kullanılır (DKS kumanda fonksiyonlarına ilişkin yazılım işlemci istasyonu kabineti, DPC-1’de yer alan bilgisayarda yüklüdür).
Operatör iş istasyonu (OS), ekran, bilgisayar, kontrol paneli, klavye ve montaj plakalarından (güç kaynağı, ağ anahtarı, eternet bağlantı paneli ve bağlantı terminalleri gibi yardımcı cihazlar montaj plakaları üzerindedir) oluşur.
Şimdi Operatör İş İstasyonunda yer alan cihazları anlatmaya çalışacağım.
1.2.1 Bilgisayar
Şekil 1.7 Bilgisayar
İş istasyonlarında kullanılan genel maksatlı bilgisayardır. Operatör kontrol paneli ile sistem arasında
arayüz fonksiyonlarını yerine getirir. Üzerinde yüklü özel yazılım ile DKS için simülasyon ve eğitim
yapılmasını sağlar.
1.2.2 Ekran
Şekil 1.8 Ekran
Operatör iş istasyonlarında kullanılan LCD ekrandır. DKS kullanım fonksiyonları bu ekran üzerinden
icra edilir, Çalışma moduna göre farklı bilgileri sergiler.
1.2.3 İş İstasyonu DKS Ana Kontrol Paneli (BU-DP)
Şekil 1.9 İş İstasyonu DKS Ana Kontrol Paneli (BU-DP)
K-Pos DP-21 sistemi oprtaör iş istasyonlarında kullanılan ana kontrol panelidir (Business Unit-Dynamic Positioning, BU DP). Üzerinde yer alan fonksiyon butonları ile DKS fonksiyonlarına kolay erişim sağlanır. Operatör kontrol panelinin bir parçası olan giriş paneli üzerinden iş istasyonu bilgisayarı ile iletişim kurar. Butonlarla verilen komutlar ve fonksiyonlar iş istasyonu bilgisayarına gider. Üzerinde yer alan butonlar çeşitli gruplara ayrılmıştır (Çalışma modu, sensörler, iticiler, ekran
görüntüleri vb).
1.2.4 İş İstasyonu Alarm ve Kontrol Paneli (ALC)
Şekil 1.10 İş İstasyonu Alarm ve Kontrol Paneli (ALC)
Alarm ve kontrol paneli (ALC) iş istasyonlarında kullanılan operatör panelin bir parçasıdır. Üzerinde yer alan gösterge lambaları sistemin alarm ve çalışma durumuna ilişkin bilgi verir. DKS iş istasyonları seçimi bu panel üzerinden yapılır (kumandanın alınması/verilmesi). Giriş paneli üzerinden konsol bilgisayarına irtibatlanır.
1.2.5 Dümen/Dönüş Çemberi
Şekil 1.11 Dümen/Dönüş Çemberi
Dümen/Dönüş çemberi dairesel olarak yerleştirilmiş butonlardan oluşur. Geminin dönüş ve rota değişiklik işlemlerini kontrol etmek için kullanılır (gemi ana tahrik sistemi DKS tarafından kontrol edildiğinde).
1.2.6 Giriş Paneli
Şekil 1.12 Giriş Paneli
Giriş paneli, DKS iş istasyonu operatör panelinde bilgisayar ile iletişimde bulunan ana paneldir. Ekran kumandaları için üzerinde bir adet iztopu bulunur. Ayrıca DKS fonksiyonlarına bağlı olarak alfanümerik bir değer girmek için gerekli butonlar mevcuttur (DKS iş istasyonu bilgisayarı için standart klavye ve mouse fonksiyonlarını icra eder).
1.2.7 Kumanda Kolu
Şekil 1.13 Kumanda Kolu
DKS iş istasyonları üzerinde elle geminin mevkisi ve/veya pruvasının değiştirilmesi için kullanılan üç eksenli bir kumanda koludur. Çalışılan moda göre geminin üç eksen üzerindeki hareketleri kumanda kolu üzerinden manuel olarak kontrol edilebilir. Kullanıcının mekanik olarak verdiği komutu potansiyometre sinyaline (elektriksel) çevirir ve BU-DP panel ve giriş paneli üzerinden iş istasyonu bilgisayarına gönderir.
1.2.8 Mod Seçim Anahtarı (4 konumlu)
Şekil 1.14 Mod Seçim Anahtarı (4 konumlu)
Geminin ana tahrik sistemine kumanda edecek istasyonun seçim anahtarıdır. Ana tahrik sisteminin
uzaktan kumanda edileceği istasyonu seçer. K-Pos DP-21 ve cJoy konumlarında ana tahrik
sistemi elemanlarına DKS tarafından kumanda edilir
K-Pos DP-21 seçildiğinde OS1 ve OS2;
cJoy seçildiğinde ise OT tarafından kumanda edilir.
Bu yazımızda kısaca bütünleşik operatör iş istasyonu donanımlarına değindik. Gelecek yazımız cJoy Kumanda Sistemi üzerine olacaktır.
HAZIRLAYAN
ÇAĞLAR ASLAN
UZAKYOL 2. KAPTAN
0 notes
Text
Akdeniz Çıkmazında Dillendirilen MEB ve Kıta Sahanlığı Gibi Deniz Hukuku Kavramları Neyi İfade Ediyor
MEB VE KITA SAHANLIĞI GİBİ DENİZ HUKUKU KAVRAMLARINA GENEL BAKIŞ
Bu yazımızda, son birkaç yıldır Doğu Akdeniz’in adeta kaynar kazana dönüşünden itibaren radyo, televizyon ve internet gibi iletişim araçlarında sıklıkla duyduğumuz MEB hakkında Deniz Hukuku kavramlarına değineceğiz.
Öncelikle Deniz Hukuku kavramlarının gelişim sürecine bakalım. Deniz hukuku kuralları yüzyıllar boyunca örf ve adet hukuku biçiminde gelişmiştir. Ancak, ülkelerin sanayileşmesinden sonra artan arz talep dengesinin önemli unsurlarından olan; denizcilik, denizi kullanma ve deniz alanları, üzerine düzgün derlenmiş yazılı kurallar ihtiyacı doğurmuştur. Önemli adımlar şu şekildedir.
Bu yöndeki çalışmaların ilk örnekleri, 1873 yılında kurulmuş olan, Uluslararası Hukuk Derneği (International Law Associaton) ve Uluslararası Hukuk Enstitüsü (Institut de Droit International) tarafından gerçekleştirilmiştir.
BM Çatısı altında ilk resmi girişim 1930 yılında yapılmış ama başarı sağlanamamıştır.
1958 tarihinde yapılan Cenevre konferansında Karasuları ve Bitişik Bölge Sözleşmesi, Kıta Sahanlığı Sözleşmesi, Açık Deniz Sözleşmesi, Balıkçılık ve Açık Denizlerin Canlı Kaynaklarının Korunması Hakkında Sözleşmeleri Kabul edilmiştir. Bu sözleşeler tarihte ilk defa denizlerle ilgili hukuku düzenleyen sözleşmelerdir.
1973-1983 Birleşmiş Milletler Deniz Hukuku Sözleşmesi kabul edilmiştir. Bu sözleşmeye “Denizler Anayasası” da denilmektedir. İşte MEB kavramı bu son sözleşme ile hayatımıza girmiştir. Sözleşmeye taraf olan ülke sayısı 166, antlaşmaya taraf olan ülke sayısı ise 146’dır. Ancak, aralarında ABD, Kolombiya, İsrail, Peru, Venezüella ve Türkiye gibi ülkelerin yer aldığı yaklaşık 30 ülke henüz Sözleşmeye taraf değildir.
Bu çalışmalar sonrasında ortaya çıkan kavramlar ve tanımları;
İÇ SULAR
Karasularının ölçülmeye başlandığın hattın kara kısmında kalan sulara iç sular denir. Koylar, körfezler, limanlar, kapalı denizler ve iç denizler ile düz esas hatların gerisinde kalan sular iç suları teşkil eder. Kıyı devletinin bu alanda tam yetkisi vardır.
Esas hat dediğimiz karasularının başlangıcı olarak kabul edilen hattır.
KARASULARI
Karasuları, egemen bir devletin kara topraklarına bitişik, genişliğini uluslararası hukuka göre kendisinin belirlediği, hâkimiyeti kıyı devletine ait olan deniz alanını belirler. Karasular maksimum 12 deniz milidir. Alan İç suların bitişiyle başlar(Esas Hat)
İç sulardan farklı olarak. Yabancı gemilerin karasularında zararsız geçiş hakkı vardır. Tam hâkimiyet bu konuda hukuksal olarak sınırlandırılmıştır.
BİTİŞİK BÖLGE
Karasularının dışında kalan bir bölgedir. Karasuları içinde oluşabilecek kaçakçılık, yasadışı işler, göçmenlik, sağlık gibi konularda kıyı devletin karasularının dışındaki bu alanda denetleme yetkisi vardır. Bitişik bölge sınırı, karasularıyla birlikte maksimum 24 deniz milidir.
KITA SAHANLIĞI
En basit anlatımla, kıta sahanlığı kıyı devletinin deniz altındaki doğal uzantısıdır. Kıta sahanlığı su altı alanlarının deniz yatağı ve toprak altını kapsar. Bunlar;
1) Madenler ile öteki cansız kaynaklar,
2) Deniz yatağı ve toprak altı ile sürekli fiziksel dokunma durumunda bulunan canlılar.
Kıyı devletinin üzerinde hak sahibi olduğu kaynaklar ya süngerler, midyeler, mercanlar gibi tam olarak tabana yerleşik bir biçimde bulunan sabit deniz ürünlerinden ya yengeçler, ıstakozlar, salyangozlar gibi tabana sürekli fiziksel dokunma içinde hareket eden sürüngenlerden ya da deniztarakları, denizkestaneleri gibi deniz yatağının toprak altına yerleşen canlılardan oluşmaktadır. Bu canlı kaynaklara ayrıca deniz yosunları ve öteki deniz bitkileri gibi deniz tabanına yerleşik bulunan bitkileri de eklemek gerekmektedir. Madenler ve öteki cansız kaynaklara gelince, bunlar gerek deniz yatağı üzerinde çökelti tabakası içinde bulunan maden yumrularını gerekse toprak altında bulunan her türlü madeni ve hidrokarbürleri içermektedir.
Burada söyle bir durum vardır, eğer kıyı devletinin coğrafi olarak kıta uzantısı 200 milden az olsa bile hukuki olarak 200 mil olarak kabul ediliyor.
Eğer doğal uzantı 200 mili geçiyorsa 1982 deniz hukuki sözleşmesinin 76. Maddede belirtilen özel kuralların uygulanması önerilmektedir. Her hâlükârda 350 mili aşamayacaktır.
Kıta sahanlığı su altı alanlarının deniz yatağı ve toprak altını kapsar.
MÜNHASIR EKONOMİK BÖLGE (MEB)
Karasularından itibaren 200 deniz milini kapsayan alandır. Kıyı devletine su kütlesi ile deniz yatağı ve onun toprak altında kaynaklara hak sahipliği verir. Bu bölge içinde kıyı devleti; su yüzeyi toprak altı ve üstü canlı ve cansız doğal kaynakların araştırılması, muhafazası, işletilmesi, korunması ve idaresine hakkına sahiptir.
Özet olarak
Sınırı karasularının bitişinden itibaren 200 mildir
Kıyı devletine; Su tabakası, deniz yatağı, deniz yatağının toprak altındaki canlı cansız tüm kaynaklara hak sahipliği verir.
Alanda kıyı devletinin mutlak hâkimiyeti yoktur. Haklar doğal kaynaklarla sınırlandırılmıştır. Diğer devletler diğer konularda bölgeyi serbestçe kullanabilir.
KITA SAHANLIĞI özel durumlarda 350 mile kadar ulaşabiliyorken. MEB maksimum 200 deniz milidir.
KITA SAHANLIĞI deniz yatağı ve toprak altını kapsar. MEB bunlara ilave olarak su kütlesinde bulunan kaynakları da kapsar.
KITA SAHANLIĞI VE MEB de diğer devletler bu alandaki deniz ulaşımına, bu alan üzerindeki hava ulaşımına, telekomünikasyon kabloları veya enerji nakil boruları döşemeye, bilimsel araştırmalar yapmaya ve devletler hukuku açısından kabul edilen diğer faaliyetlere ilişkin hakları kullanmaya devam edebilirler.
Münhasır ekonomik bölge de balıkçılık, bilimsel araştırma yapma ve suni ada yetkisi kıyı devletine aittir.
Münhasır ekonomik bölgenin kıyı devleti tarafından ilan edilmesi gerekmektedir. Kıta sahanlığı için ilana gerek yoktur.
AÇIK DENIZ
Açık Deniz, hiçbir devletin ülkesine, egemenliğine ait olmayan iç sular, kara suları, takımada devletlerinin takımada suları ve münhasır ekonomik bölge dışında kalan uluslararası deniz alanını kapsamaktadır
KAYNAKLAR
Sorular ve cevaplar ile MEB kavramı DR: TÜMAMİRAL CİHAT YAĞCI ( Deniz Basımevi müdürlüğü Pendik İstanbul 2019)
Birleşmiş milletler deniz hukuku sözleşmesi ve deniz alanlarına ilişkin bazı kavramlar Nuray KARAPINAR (Doğal Kay. ve Eko. Bült. (2015) 20: 13-21)
https://www.researchgate.net/figure/Maritime-Zones-The-right-to-regulate-navigation-of-ships-varies-between-the-maritime_fig9_273756694
https://www.kdhukuk.com/kita-sahanligi/
https://www.un.org/depts/los/convention_agreements/texts/unclos/unclos_e.pdf
HAZIRLAYAN
EMRE BABAOĞLU
UZAKYOL VARDİYA ZABİTİ
0 notes
Text
DPO Sertifika Süreci ve Offshore
DPO SERTİFİKA SURECİ VE OFFSHORE HAKKINDA BİLİNMESİ GEREKENLER Dokuz Eylül Üniversitesi'nden Yasin Ufuk EROĞLU kardeşimizin isteğiyle sertifika alma süreci, çalışma koşulları ve kontrat süreleri ile ilgili bilgilerimi aktarmaya çalışacağım. Offshore endüstrisi öncelikle iki endüstriden oluşur. Bunlar; offshore petrol ve gaz endüstrisi ve offshore rüzgar enerjisi endüstrisi. Bizim değineceğimiz nokta, offshore petrol ve gaz endüstrisi olacaktır. Bu endüstri içinde ikiye ayrılır; 1- Offshore Platform Açık deniz platformları veya petrol platformları, okyanus tabanlarının derinliklerinde bulunan kuyulardan gaz ve petrol delme ve çıkarma amacıyla kullanılan dev yapılardır. Bu platformlar yerinde işleme ve depolama tesislerine sahiptir ve mürettebat için konaklama sağlar. Offshore platformları güçlü bir şekilde inşa edilmiştir ve zorlu ortamda on yıllar sürecek şekilde tasarlanmıştır. Gereksinimlere bağlı olarak, yüzer veya okyanus tabanına sabitlenebilirler. 60 ila 3600 mt arasında geniş bir su derinliği aralığında çalışabilen farklı platform türleri vardır. Günümüzde yaygın olarak kullanılan petrol platformları arasında: sabit platformlar, uyumlu kuleler, yarı dalgıç Platform, yüzer Üretim Sistemleri, Gergi ayağı platformları, Sondaj gemileri ve Spar platformları bulunmaktadır. Ülkemizde bu konuda halihazırda Sondaj gemilerimiz bulunmaktadır. Bu gemilerimizin isimleri Fatih, Yavuz ve sondaj faaliyetlerine yakın zamanda başlaması planlanan Kanunidir. 2. Offshore Gemileri Offshore gemiler, offshore petrol ve gaz endüstrisini desteklemek için özel olarak tasarlanmış deniz gemileridir. Sondaj gemileri gibi bazıları petrol ve gaz keşifleri ve üretimleri için açık deniz platformları olarak kullanılmaktadır. Offshore gemiler genel olarak Platform tedarik gemileri (PSV), her türlü özel deniz gemileri ve araştırma gemileri olarak sınıflandırılabilir. Bu bağlamda ülkemizde araştırma ve sismik faaliyet yürüten gemilerimiz mevcut olup bunların isimleri Barbaros Hayreddin Paşa ve Oruç Reis Sismik Araştırma gemileridir. Ayrıca Platform tedarik gemilerimiz de (PSV) mevcuttur. 2.1 Offshore Çalışma Koşulları Offshore endüstrisi deneyimli çalışanlar için geniş bir alanda meslek imkanı sunmaktadır. Bu alanda işler son derece zor olabilir ve zorlu koşullarda uzun çalışma saatleri talep edilebilir. Vardiyalı çalışma, genellikle dünya standartlarında Offshore Platformlarda 14 gün boyunca açık denizde çalışan ve ardından 14 günlük bir dinlenme süresi olan offshore işlerinin ayrılmaz bir parçasını oluşturur. Offshore meslekler, petrol ve gaz üretimi ve yönetimi alanlarında farklı istihdam seviyelerini içerir. Buradaki ana faaliyet alanları arasında sondaj, arama, etüt, boru, kaynak, dalış, kalite kontrolleri, sağlık ve güvenliktir. Ülkemizde sondaj, arama ve platform tedarik gemileri (PSV) mevcuttur. Arama gemilerimizde çalışma süresi 35 gün boyunca açık denizde çalışma ve ardından 35 günlük bir dinlenme süresini oluşturur. Sondaj gemilerimizde bu süre 28 gün çalışma-dinlenme ve tedarik gemilerimizde ise 42 gün çalışma-dinlenme şeklindedir. Tabii bu çalışma süreleri şirketlerin işleyişi doğrultusunda değişme gösterebilir. 2.1.1 DP Sertifika Alma Süreci Bu süreç çalışma sürelerinin kısa olması nedeniyle uzun bir zaman alabilir. Bu kısa çalışma sürelerinden ötürü hizmet toplamak zor olduğu için, ehliyet büyütme işlemi zorlaşmaktadır. Benim tavsiyem, kısa sürede 2. kaptanlık veya kaptanlık hayalleriniz varsa, bu isteğinizi bir süre rafa kaldırmanızdır. Öncelikle yapacağınız iş, ciddiyet gerektiren, hata yapma lüksü düşük ve profesyonel çalışma anlayışı gerektiren bir iş ortamıdır. Böyle bir iş ortamında, oluşabilecek herhangi bir aksi durumun büyük maliyetli zararlar açabileceğinin unutulmaması gerek. Bu doğrultuda gelecek planınızı belirleyin, hedefinizi çizin ve gerçekten bu işe gönül verecek ve liyakat sahibi olacağınıza inanıyorsanız adımınızı atın. Tüm bunlardan sonra sertifika sürecini anlatmaya çalışacağım; Gemi standartlarina göre alacağınız sertifika limitli veya limitsiz olarak değişmektedir. Gemiler IMO standartlarına göre redundancy dediğimiz yani yedek fazlalığına göre DP1, DP2 veya DP3 olarak sınıflandırılır. ( Bu yedek fazlalık kısmını ayrı bir blog yazımda paylaşacağım.) İlk olarak bu sertifikayı alabilmek için NI onaylı bir kurstan (ülkemizde bu kurs mevcut değil) DP Basic Induction eğitimi almanız ve yapılan online sınavda başarılı olmanız gerekmektedir. Sonrasında 60 günlük DP'li gemilerde aktif stajı tamamlayıp Advance kurs yani simülatör kursu alıp akabinde tekrar 60 günlük stajınızı DP'li bir gemide tamamladıktan sonra evraklarınızı İngiltere'de bulunan Nautical Institute kurumuna gönderiyorsunuz. Onaylandığı takdirde sertifika almaya hak kazanırsınız. Eğer stajınızı DP 2 bir gemide tamamlarsanız Unlimited DPO yani limitsiz DPO sertifikasını alırsınız. O sebeple staj yapacağınız gemiyi doğru seçmeniz gerekmektedir. Tüm stajınızı DP 1 gemide tamamlarsanız Limited DPO yani Limitli DPO sertifikasını almaya hak kazanırsınız. Ayrıca stajınıza DP 1 gemide başlayıp, sonrasında DP 2 gemide staja devam ederseniz Unlimited DPO sertifikasını alma şansınız doğabilecektir. Bu bağlamda Oruç Reis Araştırma Gemimiz DP 1 ve Barbaros Hayreddin Paşa Araştırma Gemimiz DP 2 dir. Bu konuda yazacaklarım bunlardan ibarettir. Farklı bir konuda isteğiniz olursa “Talepler ve İstekler” kısmından talep oluşturabilirsiniz. HAZIRLAYAN ÇAĞLAR ASLAN UZAKYOL 2. KAPTAN
#Sertifika offshore DPO DinamikKonumlandırma DP DynamicPositioning bilgi platform Gaz Petrol Enerji#Caglar Aslan
0 notes
Text
DKS Kontrol İşlemci İstasyonu
DKS KONTROL İŞLEMCİ İSTASYONU
BOLÜM 2
1.1 DKS Kontrol İşlemci İstasyonu Kabineti (DPC-1)
Şekil 1.3 DKS Kontrol İşlemci İstasyonu Kabineti (DPC-1)
Dinamik konumlandırma sistemi tarafından yapılan kumanda işlemlerinin kontrol ve izleme fonksiyonlarının icra edildiği DPC-1 kabineti içerisinde bir adet kontrol işlemci istasyonu olarak kullanılan bilgisayar ve arayüz kartları (modül) yer alır. DKS’nin tüm kontrol ve izleme fonksiyonları bu kabinet içerisinde gerçekleşir. Ayrıca harici cihazlar ile DKS’nin arayüz fonksiyonlarıı bu kabinet tarafından yerine getirilir. Modüler yapıdaki DPC-1’in ileride doğabilecek ihtiyaçlara göre fonksiyonel özellikleri genişletilebilir.
DPC-1 kabinet içerisinde aşağıdaki ana elemanlar yer alır:
a- I/O Modülleri
b- RCU Modülü (Bilgisayar, Kontrol İşlemci İstasyonu)
c- Eternet ağ altyapı elemanları
d- Güç kaynakları
e- Güç ve sinyal dağıtımına ilişkin kablolar, terminaller ve diğer elemanlar.
1.1.1 Kontrol İşlemci Modülü (RCU502)
Şekil 1.4 Kontrol İşlemci Modülü (RCU502)
Dinamik Konumlandırma sistemlerinde kontrol işlemci istasyonu olarak kullanılan tek kart üzerine monteli bilgisayardır (RCU502). İşlemci olarak MPC8245’i kullanan bir PowerPC (400Mhz) içerir. Üzerinde yüklü özel yazılımı kullanarak dinamik mevki kontrol işlemi için gerekli tüm fonksiyonları yerine getirir.
Bu fonksiyonlar şunlardır:
a- Hesaplamaları yapmak,
b- Referans bilgilerini ve sensör bilgilerini almak,
c- Diğer cihazlar ile iletişimi yönetmek,
d- Ana tahrik sistemine kumanda göndermek ve geri besleme sinyallerini alıp değerlendirmek,
e- Sistem çalışma performansını kontrol etmek.
1.1.2 Güç Kaynağı (24VDC)
Şekil 1.5 Güç Kaynağı (24VDC)
Sistem bileşenlerinin +24VDC güç ihtiyacını karşılayan standart bir güç kaynağıdır.
Bu yazımızda DKS Kontrol İşlemci İstasyonuna değindik. Gelecek yazımız bütünleşik operatör iş istasyonu donanımları üzerine olacaktır.
HAZIRLAYAN
ÇAĞLAR ASLAN
UZAKYOL 2. KAPTAN
0 notes
Text
Dinamik Konumlandırma İlk Bakış
DKS HAKKINDA TEMEL BİLGİLER
BÖLÜM 1
Ufkunuzda canlanması için devasa büyüklükte Sondaj Gemileri düşünün, konumu değişmeden, yüksek hassasiyetle nasıl konumlandırılıyor? İşte bu gibi kafanıza takılan sorulara yazılarımızda yanıt aramaya çalışacağız. Amacımız bilgilendirme olup, sizlere faydalı olacağını umaraktan yazımıza geçelim.
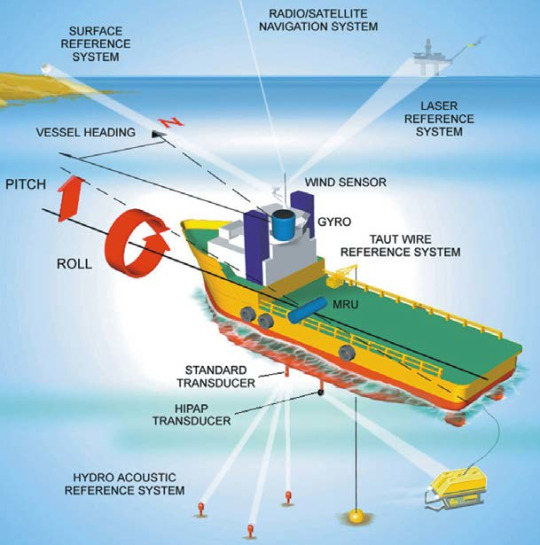
Dinamik Konumlandırma Sistemi (DKS), mevki referans sistemlerinden aldığı bilgiler ve geminin diğer sensörlerinden gelen destek bilgilerini kullanarak yaptığı hesaplamalar neticesinde, opertaör tarafından istenen gemi mevkisini (ve/veya pruva değerini) sabit tutacak şekilde geminin ana tahrik sistemi elemanlarına (iticiler, tünel iticiler) kumanda edebilen bir sistemdir. Uluslar arası denizcilik kurallarına uyumluluk açısından (IMO Class-1) sistem içerisinde benzer görevleri yapabilecek (birbirlerini yedekleyebilecek) alt sistemler mevcuttur. Bu kapsamda IMO'ya uygun bir sistem alt yapısı oluşturulmuştur. Sistem fonksiyonel açıdan mevki kontrolüne yönelik olarak birbirinden tamamen bağımsız iki ana alt sistemden oluşur (K-Pos Mevki Kontrol Sistemi ve cJoy Kumanda Kolu Sistemi).
K-Pos Mevki Kontrol Sistemi standart gemi sensörleri dışında akustik olarak mevki referansı verebilen HiPAP, DPS 110 (DGPS Mevki Konumlandırma Sistemi), ARTEMIS, FANBEAM ve TAUT WIRE gibi referans sistemlerden veri alır. Bu referans sistemler geminin DP-1, DP-2 veya DP-3 olmasına göre değişiklik gösterebilir. K-Pos aynı zamanda geminin yatay, dikey ve düşey eksenlerdeki hareketlerini (Roll, Pitch, Heave) algılayan bir sensör olan MRU-H’dan aldığı verileri de kullanır. HiPAP, DPS 110 ve MRU-H Dinamik Konumlandırma Sisteminin olmazsa olmaz parçalarıdır.
Aşağıdaki tabloda K-Pos DP'deki temel sistemler gösterilmektedir.
Sistem DP-11 Tek başına, tekli DP kontrol sistemi DP-12 Entegre, tekli DP kontrol sistemi DP-21 Tek başına, çift yedekli DP kontrol sistemi DP-22 Entegre, çift yedekli DP kontrol sistemi DP-31 Tek başına, üç yedekli DP kontrol sistemi DP-32 Entegre, üç yedekli DP kontrol sistemi
K-Pos kavramının esnekliği ile beraber belirli bir sınıf için tasarlanan sistemler daha yüksek bir sınıfın gereksinimlerini karşılamak için kolayca yükseltilebilir. Tablo, temel sistem türleri ile yükseltilebilir ve yedeklenebilir IMO ekipmanlarını göstermektedir.
Sistem IMO
Donanım Sınıfı Notlar DP-11/12 Sınıf 1 Donanımlar Sınıf 2’ye yükseltilebilir DP-21/22 Sınıf 2 Donanımlar Sınıf 3’ye yükseltilebilir DP-31/32 Sınıf 2 Donanımlar Sınıf 3’ye yükseltilebilir DP-21/22 with
DP-11/12 Sınıf 3 Yedekleme olarak DP-11/12 DP-31/32 with
DP-11/12 Sınıf 3 Yedekleme olarak DP-11/12
Dinamik Konumlandırma Sistemi ile ilgili IMO donanım sınıfları IMO MSC/Circ.645 no'lu sirkülerde tanımlanmıştır.
cJoy kumanda Kolu Sistemi, DKS içerisinde (IMO'ya uygun olarak) tamamen bağımısz olarak çalışabilen, kendi kumanda istasyonuna sahip bir alt sistemdir. Ayrıca gemi sensörlerinden de K-Pos’dan bağımsız kanallar ile iletişim kurar (DKS içerisinde K-Pos sistemini yedekleyen bir sistem olarak değerlendirilir).
Sistemde bunlara ilaveten çevresel cihaz olarak kesintisiz güç kaynağı (KGK) ve iki adet yazıcı yer alır. Yüksek Hassasiyetli Akustik Mevki Referans Sistemine (HiPAP sistemini ayrı bir blog yazımda ele alacağım) veri göndermek üzere deniz dibine yerleştirilen transponderler ve transponder batarya şarj cihazları da DKS içerisinde tanımlanmıştır.
Şekil 1.1 Dinamik Kumanda Sisteminin Gemi Mevkisini Kontrol Etmesi
Şekil 1.2 DKS’yi oluşturan Alt Sistemler ve Üniteler
Dikkatleri toplamak, okurken sıkılmamak, karmaşıklıktan uzak, sade ve anlaşılır olabilmesi için yazımıza Bölüm 2 ve devamı gelecek şekilde ilerleyeceğiz..
HAZIRLAYAN
ÇAĞLAR ASLAN
UZAKYOL 2. KAPTAN
http://caglaraslan.com/
0 notes
