#Incremental Encoders
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
Post activity is at the highest at 4:00 pm EDT; notes peak at 10:00 pm EDT.
Text
What is the Difference between Absolute and Incremental Encoders?
Learn the key differences between absolute and incremental encoders. Understand how they work, their advantages, and ideal applications in automation, robotics, and motion control to help you choose the right one for your needs.
Read more: https://www.emcoprecima.com/blog/incremental-absolute-encoders-key-differences-you-should-know/
0 notes
Text
Global Linear Incremental Magnetic Encoder Market: Trends, Tech Advances & Strategies 2025–2032

Linear Incremental Magnetic Encoder Market Analysis:
The global Linear Incremental Magnetic Encoder Market size was valued at US$ 234 million in 2024 and is projected to reach US$ 348 million by 2032, at a CAGR of 5.8% during the forecast period 2025-2032
Linear Incremental Magnetic Encoder Market Overview
The U.S. market size is estimated at USD 120 million in 2024, while China is projected to reach USD 95 million in the same year.
The Stainless Steel segment is expected to reach USD 180 million by 2032, growing at a CAGR of 6.5% over the next six years.
We have surveyed the Linear Incremental Magnetic Encoder manufacturers, suppliers, distributors, and industry experts on this industry, involving the sales, revenue, demand, price change, product type, recent development and plan, industry trends, drivers, challenges, obstacles, and potential risks This report aims to provide a comprehensive presentation of the global market for Linear Incremental Magnetic Encoder, with both quantitative and qualitative analysis, to help readers develop business/growth strategies, assess the market competitive situation, analyze their position in the current marketplace, and make informed business decisions regarding Linear Incremental Magnetic Encoder. This report contains market size and forecasts of Linear Incremental Magnetic Encoder in global, including the following market information:
Global Linear Incremental Magnetic Encoder market revenue, 2020-2025, 2026-2032, ($ millions)
Global Linear Incremental Magnetic Encoder market sales, 2020-2025, 2026-2032, (K Units)
Global top five Linear Incremental Magnetic Encoder companies in 2024 (%)
Linear Incremental Magnetic Encoder Key Market Trends :
Rising Demand in Automation Increasing adoption of automation across industries is driving demand for precise and reliable linear incremental magnetic encoders.
Material Innovations Use of advanced materials like stainless steel and aluminum enhances durability and performance, expanding application areas.
Growth in Metrology Applications The expanding metrology sector requires high-accuracy encoders for measurement and positioning, boosting market growth.
Integration with IoT and Smart Devices Encoders are increasingly integrated into smart manufacturing and IoT systems for improved monitoring and control.
Expansion in Emerging Economies Rapid industrialization and infrastructure development in Asia-Pacific and other emerging regions fuel market growth.
Linear Incremental Magnetic Encoder Market Regional Analysis :
https://semiconductorinsight.com/wp-content/uploads/2025/01/download-34_11zon-1.png
North America:Strong demand driven by EVs, 5G infrastructure, and renewable energy, with the U.S. leading the market.
Europe:Growth fueled by automotive electrification, renewable energy, and strong regulatory support, with Germany as a key player.
Asia-Pacific:Dominates the market due to large-scale manufacturing in China and Japan, with growing demand from EVs, 5G, and semiconductors.
South America:Emerging market, driven by renewable energy and EV adoption, with Brazil leading growth.
Middle East & Africa:Gradual growth, mainly due to investments in renewable energy and EV infrastructure, with Saudi Arabia and UAE as key contributors.
Linear Incremental Magnetic Encoder Market Segmentation :
Global Linear Incremental Magnetic Encoder market, by Type, 2020-2025, 2026-2032 ($ millions) & (K Units) Global Linear Incremental Magnetic Encoder market segment percentages, by Type, 2024 (%)
Stainless Steel
Aluminum
Others
Global Linear Incremental Magnetic Encoder market, by Application, 2020-2025, 2026-2032 ($ Millions) & (K Units) Global Linear Incremental Magnetic Encoder market segment percentages, by Application, 2024 (%)
Automation
Metrology
Electronic Manufacturing
Other
Competitor Analysis The report also provides analysis of leading market participants including:
Key companies Linear Incremental Magnetic Encoder revenues in global market, 2020-2025 (estimated), ($ millions)
Key companies Linear Incremental Magnetic Encoder revenues share in global market, 2024 (%)
Key companies Linear Incremental Magnetic Encoder sales in global market, 2020-2025 (estimated), (K Units)
Key companies Linear Incremental Magnetic Encoder sales share in global market, 2024 (%)
Further, the report presents profiles of competitors in the market, key players include:
Electronica Mechatronic Systems
ELGO Electronic
SIKO GmbH
Lika Electronic
GIVI MISURE
NEWALL
POSIC
KÜBLER GmbH
Precizika Metrology
Eltra Spa
Balluff GmbH
Honeywell Advanced Sensing Technologies
BOGEN Magnetics GmbH
NOVOTECHNIK
Paul Vahle GmbH & Co. KG
Drivers
Increased Automation in Manufacturing The push for automation in manufacturing plants drives the need for precise position feedback, enhancing encoder demand.
Rising Industrial Digitization Digitization efforts in industries require advanced sensors like magnetic encoders to improve process efficiency and accuracy.
Durability and Maintenance Benefits Magnetic encoders offer robustness and low maintenance, making them attractive for heavy-duty and continuous-use applications.
Restraints
High Initial Costs The upfront cost of advanced magnetic encoder systems can be a barrier for small and medium enterprises.
Competition from Alternative Technologies Other encoder types like optical encoders pose competition due to different performance advantages.
Environmental Sensitivity Magnetic encoders can be sensitive to strong electromagnetic interference, limiting their use in some industrial environments.
Opportunities
Expansion in Emerging Markets Growing industrial sectors in countries like China, India, and Southeast Asia offer vast market potential.
Technological Advancements Development of more compact, energy-efficient, and accurate encoders can open new application areas.
Customization and Integration Offering tailor-made solutions and seamless integration with industrial automation systems can attract more customers.
Challenges
Supply Chain Disruptions Global supply chain issues can delay production and delivery of encoders, impacting market growth.
Standardization Issues Lack of uniform standards across regions and industries can complicate product adoption.
Skilled Workforce Shortage Shortage of trained personnel to install and maintain advanced encoder systems may slow market expansion.
#Global Linear Incremental Magnetic Encoder Market#Global Linear Incremental Magnetic Encoder Market Share
0 notes
Text

Buy Baumer H0G71-DN-1024-CI-12H7
0 notes
Text
Because of the way floating point numbers work, as they get larger there comes a point where you actually can't increment them. They simply get too imprecise to encode a difference of 1.0f. Which is to say, for sufficiently big (or, I guess "magnitudinous") values, x == x + 1. For high-precision floats, like IEEE 754 double-precision and quadruple-precision and x87 extended-precision floats (among others), these thresholds are really quite large -- in the trillions at the lowest -- but for the humble 32-bit float it's not tremendously big, only 16,777,216 (or -16,777,216).
Now, when it comes to programs that do lots and lots of incrementing and decrementing, what does my mind go to? Brainfuck. Brainfuck is built almost entirely around incrementing and decrementing. Historically, this has been a source of problems for implementers, as there's no immediately obvious way to handle overflows or underflows. Should the cell array wrap around? Should the program simply segfault? Should cells be 8-bit, or bigger? Should we simply continue allocating memory as the cell pointer gets further from the origin? How should we handle negative cell pointer values?
Well, we can kill ...one bird with ...another, already dead bird here: make everything use 32-bit floats! We don't have to worry about overflows anymore, the cell pointer will just get "stuck" after a while! This also really simplifies the memory model: we can just statically allocate 33,554,433 doublewords on program startup (mere megabytes) and be assured the cell pointer will never escape into uninitialized memory. We don't have to worry about the cell values themselves either -- they'll bang up against the same thresholds.
I wrote a highly unsophisticated compiler (with NASM as an assembler backend) several months ago using this idea, and I think I'd like to come back to it -- there's a funny sort of inelegant elegance here.
17 notes
·
View notes
Text
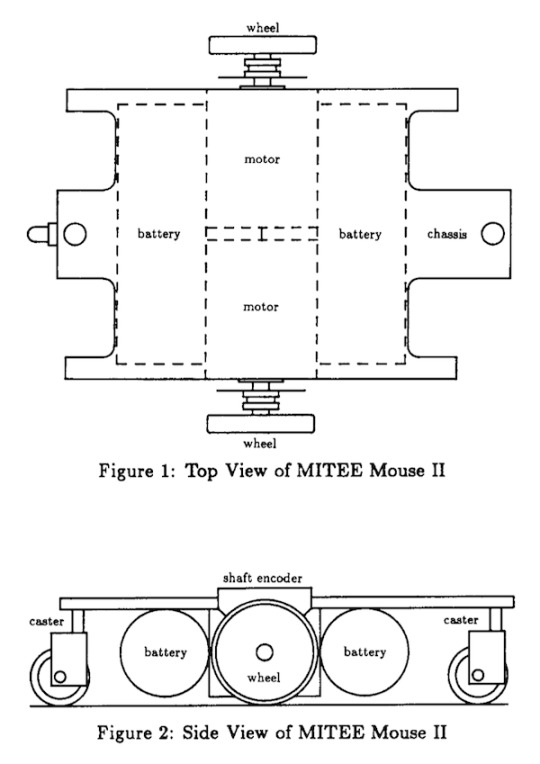
MITEE Mouse II (1987) by Dave Otten, MIT. "The IEE World Micromouse Championship in London saw 13 micromice competing. The winner was Dave Otten who managed to win both first and second prize with Mitee Mouse I and Mitee Mouse II." – Micromouse History, UKMARS.
"Figures 1 and 2 show the basic chassis and drive components of MITEE Mouse II. One drive wheel is located on either side of the mouse near the center of mass, much like a wheel chair. Each wheel is mounted on the shaft of a DC motor along with an incremental encoder to sense position. Casters at the front and back of the mouse provide additional support. NiCd batteries mounted adjacent to the motors provide power for the mouse. A printed circuit board mounted above the chassis contains a microprocessor for control and two H-bridge switching converters to drive the DC motors. All control of the mouse is through the two drive wheels. The differential speed between the two wheels is used to steer the mouse, and changes in the common-mode component of the speed provides for forward acceleration and braking. Ultimately the position of each wheel determines the position and heading of the mouse in the maze. Fast, accurate, and stable control of each wheel is therefore a clear requisite of a high performance robot." – Feedback Controller Design for Servo Systems with Dominant Mechanical Resonances, by David M. Otten et al.
14 notes
·
View notes
Text

REGARDING THE STATE LUTE WAS IN SHORTLY AFTER HER CREATION; SHE WASN’T CONSCIOUS, BUT SHE WAS ALIVE — TECHNICALLY, BRUTALLY. NOT AWAKE OR AWARE, BUT STILL PRESENT. SIMILAR TO A CORPSE IN THE AFTERMATH OF DEATH, PARTS OF HER WOULD TWITCH, CONVULSE, SPASM; PAIN WOULD SPIKE THROUGH HER SYSTEM, THERE WAS NO NEURAL FRAMEWORK YET IN PLACE TO INTERPRET IT. NO INSTINCTS, NO MEMORY, NO VOICE, NO PERSONALITY; JUST RAW NERVE ENDINGS MISFIRING IN A BODY THAT DIDN’T YET UNDERSTAND IT EXISTED,
HER FORMATION WAS NOT INSTANTANEOUS; BUT THE PROJECT WAS RUSHED; IT WASN’T DIVINE SPARK & BREATH, SOFT OR FULL OF LOVE & GLITTER LIKE LILITH & THE REAL EVE — IT WAS DIVINE PROCEDURE [ SURGICAL, MECHANICAL, PROLONGED ] THE SERAPHIM ASSEMBLED HER, LIMB BY LIMB…
[ I DON’T IMPOSE THIS ON ADAM WRITERS, OF COURSE; BUT FOR MY DEFAULT LORE: ] ADAM NEVER GAVE HIS CONSENT. THE SERAPHIM DIDN'T ASK; THEY ASSUMED THEY WOULDN’T GET IT IF THEY HAD. ONE MIDRASHIC INTERPRETATION SUGGESTS THAT GOD FORMED EVE LIMB BY LIMB IN FRONT OF ADAM, & HE WAS SO HORRIFIED BY THE PROCESS, SO DISGUSTED BY THE SIGHT OF IT, THAT HE REJECTED HER OUTRIGHT, EXCLAIMING SHE WAS FULL OF BLOOD & SECRETION. THE SERAPHIM WOULDN’T RISK THAT OUTCOME; THEY CONDUCTED THE PROCEDURE IN SECRET,
IT RESEMBLED FETAL DEVELOPMENT IN REVERSE; A BODY FORMING BEING ASSEMBLED WITHOUT BIOLOGICAL ORDER. HER FORM WAS A MESS OF EXPOSED FLESH, UNFINISHED BONE, RAW NERVES, TWITCHING MUSCLE; LIMBS EXTENDING BEFORE JOINTS COULD MOVE, FLESH CLINGING TO BONE WITHOUT PURPOSE OR BREATH. DIVINE MATTER SEEPED THROUGH THE BANDAGES, ADAM'S BLOOD ( BOTH RED & GOLD ) BINDING TO FLESH THAT WASN’T FULLY FORMED,
THIS IS PART OF THE REASON LUTE IS ABLE TO RIP HER OWN ARM OFF; PART OF IT WAS ADRENALINE, TRIGGERED BY BEING CALLED A FAILURE & FUELED BY RAW HATRED FOR VAGGIE — BUT HER BODY WAS BUILT TO WITHSTAND DISASSEMBLY & REASSEMBLY. PAIN ISN’T A DETERRENT FOR HER THE WAY IT IS FOR OTHERS; NOT WHEN HER EARLIEST SUBCONSCIOUS MEMORIES ARE OF BEING PULLED APART & STITCHED TOGETHER BEFORE SHE EVER TRULY LIVED,
ONCE HER FORM STABILIZED, THE FIRST WAVE OF EXORCISTS WERE MADE & THEY WERE IMMEDIATELY DEPLOYED, WHICH PROVED TO BE A SEVERE MISTAKE. THOUGH LUTE'S BODY WAS STRUCTURALLY COMPLETE, HER MIND REMAINED UNDEVELOPED — UNDEFINED, UNSTABLE & UNFIT FOR DEPLOYMENT; HER CONSCIOUSNESS HAD YET TO FORM.
& AFTER THE FIRST WAVE PROVED UNSTABLE, LUTE WAS RETAINED FOR PSYCHOSPIRITUAL INCUBATION, TO COMPLETE WHAT WAS LEFT UNFINISHED, & TO RECONDITION; SHE WAS PLACED IN A CRYOPOD FOR CONTAINMENT. INTEGRATED WITHIN THE POD WAS A SIMULATION CHAMBER MODELED AFTER EDEN; A CLOSED GENESIS DESIGNED TO TEST HER OBEDIENCE, LOYALTY, & VIABILITY AS A SUPPORT UNIT FOR ADAM. DURING THIS PERIOD, HER ARTIFICIAL NEURAL FRAMEWORK BEGAN TO TAKE SHAPE; SIMULATED INPUTS WERE INTRODUCED INCREMENTALLY: PRESELECTED MEMORIES, LINGUISTIC SCAFFOLDING, INSTINCTUAL DIRECTIVES, & BEHAVIORAL CONDITIONING BASED ON THE SERAPHIM'S INTERPRETATION OF RIGHTEOUSNESS,
HOWEVER, THE INTENDED REFORMATION RESULTED IN IMPRINTED TRAUMA; THE PSYCHOLOGICAL IMPACT OF HER ARTIFICIAL FALL WAS ENCODED INTO HER CORE BEFORE CONSCIOUSNESS FULLY STABILIZED. SHE DISPLAYED: SPONTANEOUS MOTOR ACTIVITY, UNPROVOKED VITAL FLUCTUATIONS, & EMOTIONAL REACTIONS TO STIMULI SHE HAD NOT YET BEEN TAUGHT. THE SIMULATION WAS EVENTUALLY INITIATED. LUTE WOULD LIVE A FULL ARTIFICIAL LIFETIME AS A REVISED EVE; SHE EXPERIENCED SIN, EXILE, GRIEF, & DEATH. WHAT WAS MEANT AS CONDITIONING BECAME IMPRINTING; THE TRAUMA SHE UNDERWENT WAS ENCODED BEFORE CONSCIOUSNESS FULLY FORMED. WHEN SHE AWAKENED, HER BODY WAS FUNCTIONAL, BUT HER PSYCHE BORE THE AFTEREFFECTS OF SIMULATED GUILD & LOSS. RATHER THAN RESOLVING HER INSTABILITY, THE SIMULATION SEVEREL REPRESSED IT & WHILE LUTE EMERGED BEHAVIORALLY CORRECTED ON THE SURFACE [ OBEDIENT, PRECISE, FUNCTIONAL ] THE UNDERLYING FRACTURES REMAINED INTACT, DEEPENED BY TRAUMATIC IMPRINTING. THIS RECONDITIONED STATE, POLISHED BUT COMPROMISED, BECAME THE TEMPLATE FOR THE SECOND WAVE OF EXORCISTS
#✧ narrative | headcanons#cw medical#cw gore#cw needles#[ if by any chance you ever watched Hellsing Ultimate; remember how Mina Harker looked? kind of like that except way less bandages ]
4 notes
·
View notes
Note
viiiiv !! many many MANY congrats on 100 followers, this is truly deserved (: ur fics are one of a kind and i always love reading them <3
for the event! 🐚 i noticed you use a lot of inspiration from movies etc etc, do they hold a special place in your heart? + what’s your process for world-building? i love how you create the environments your charas live in! (๑>◡<๑)
part of my 100 followers event!
HIIII JAY thank you sm your support (and praise ue ue ue) truly mean the world!!! <33 reading your tags makes me smile everytime :'))
(also commiserating v much w the shadowban sjhfdjfh may imujings return soon—hopefully sooner than sarangcoups)
i looove talking about process/craft (the latter is my 2025 resolution after all) so i hope u dont mind the ramble djfshdfd
it didnt even occur to me until you mentioned this, but you absolutely clocked me (the ghibli hc's, sito being vaguely based on interstellar's blight, tciw and past lives—im sketching out a fic that's based on a ph indie film too) :') admittedly my non film-based wips (reverse hades/pers csc, prince lc au, separate urban fantasy au’s for bsk and kmg, idol ljh x figure skater reader, the ljh and bsk installments of the planned love after love miniseries) are yet to be finished
interestingly, i always call myself a book girlie first and foremost. but i love films—love watching, dissecting, exploring the semiotics of it (even attended an online webinar on how signs are encoded visually in cinematography lol). but comparatively (book vs film adapted), i think for me fics based off movies are easier to write and much more adjacent to pop culture than the books ive been reading recently (which are race/identity specific, deeply ideological, and/or extremely complex to adapt into a fic, like vuong, morrison, le guin, dosto, and tolstoy)
but w some of these, especially sito and tciw, i found it interesting to play with the inherent differences in storytelling that movies and written prose have, especially with regard to interiority. prose can walk you through a character's mental spiral with words, but there’s no 1:1 equivalent for film. each medium has its strengths and weaknesses. but i liked responding to those differences, in sito and tciw especially—sito with sk as a filmmaker, and with scenes that are written as scripts (how that affects how much of sk's thoughts are revealed to the reader/presumed "viewer"), and tciw as a way to explore and construct the interiority of characters that were only hinted onscreen while watching past lives.
i think for world building (im so flattered that you like the environments of the characters!) i lean into soft world building more!! so in increments and all that. asking myself if i would say/think such a thing if i were in this character's position, with their upbringing, identity, core principles, etc. also, just the notion of architecture, not just for worldbuilding but for crafting a story—i try to be careful with what i include (is it relevant to the story, and how so). the goal of architecture here is that a writer should be unable to remove a brick (whether that's worldbuilding, scene, dialogue, a character's interior thoughts, etc) without compromising the entire story's structural integrity. obvs im still working to get better at it, but yeah!
#heartepub100#learned this architecture thing from a former prof—also my fave prof#i think my worldbuilding will be put to the test in the reverse hades/pers fic especially lol—since im making up godly magic laws as i go#gonna be answering all 🐚 asks as they come but the 🪶 ones are for after thesis 🤕#.dive buddy: jay
4 notes
·
View notes
Text
PCB of the day! Adafruit I2C Stemma QT Rotary Encoder Breakout with NeoPixel - STEMMA QT / Qwiic 🔧🔄🎛️
Rotary encoders are soooo much fun! Twist them this way, then twist them that way. Unlike potentiometers, they go all the way around and often have little detents for tactile feedback. But, if you've ever tried to add encoders to your project, you know they're a real challenge to use: timers, interrupts, debouncing…
This Stemma QT breakout makes all that frustration disappear - solder in any 'standard' PEC11-pinout rotary encoder with or without a push switch. The onboard microcontroller is programmed with our seesaw firmware and will track all pulses and pins for you and then save the incremental value for querying over I2C. Plug it in with a Stemma QT cable for instant rotary goodness with any microcontroller from an Arduino UNO up to a Raspberry Pi.
You can use our Arduino library to control and read data with any compatible microcontroller. We also have CircuitPython/Python code for use with computers or single-board Linux boards.
#adafruit#electronics#pcb#opensource#opensourcehardware#pcboftheday#arduino#raspberrypi#circuitpython#python#linux#rotaryencoder#stemmaqt#neopixel#i2c#breakoutboard#engineering#hardware#microcontroller#diy#technology
35 notes
·
View notes
Note
hi. robotics question: i want an electric motor that receives input to control its force, and outputs its position. im kinda confused with different kinds of motors. controlling force is easy, right?
in terms of scale, im talking about an arduino prototype so pretty small but im fine if the motor is big enough to have its own power cable.
yeah im a programmer i dont know much about hardware :p
someone please fix me if i'm wrong, FRC uses a pretty self-contained ecosystem so I actually have no prior knowledge to answer this lol
but! based on some research, it sounds like torque control in a DC motor can be achieved by limiting the current to the motor (versus speed control, by setting voltage).[1][2] look for brushed DC motors with built-in encoders, that's the part that will tell you the motor's position. encoders can be absolute (tells you where the rotor is wrt some fixed "zero" position, consistent across power cycles) or relative/incremental (just tells you how far you've gone since you started/that you've taken a step). i'm not sure what kind of circuitry you might need to handle the current control, although looking for something marketed for arduino makes sense as a first step.[3]
there are also AC motors, brushless DC (BLDC) motors, and stepper motors, and they all have more complex control schemes that I know next to nothing about!
[1] https://electronics.stackexchange.com/questions/420289/torque-and-speed-control-of-a-dc-motor [2] https://control.com/forums/threads/how-can-i-control-a-dc-motors-torque.14793/ [3] https://forum.arduino.cc/t/dc-motor-control-using-current-sensing/434545/5
5 notes
·
View notes
Text

📢 Elecrow #PartnerSeller Program Product #Newarrival 🔥 🔱 Introducing the #EncoderCounter, meticulously designed by Y2Kb! This advanced device accurately displays and outputs the count of incremental output encoder pulses. 😻 #ElecrowPCB 🚀 #PCBA, selling, and shipping services provided by #Elecrow. For more info 👇 https://www.elecrow.com/encoder-counter.html?utm_source=tumblr&utm_term=idd=2
2 notes
·
View notes
Text
Curious about how magnetic encoders work and why they're essential in industrial systems? This blog explains the technology, types, applications, and benefits in a simple, easy-to-understand way. Whether you're an engineer, technician, or just a tech enthusiast—this is a must-read!
🔗 Read it here: https://www.globalblogzone.com/magnetic-encoders-explained-everything-you-need-to-know/
0 notes
Text
0 notes
Text
Enhance Tower Crane Performance with Multi-Turn Absolute Encoders
Optimize tower crane operations with BriterEncoders' multi-turn absolute encoders. Our encoders deliver precise positioning data crucial for the slewing mechanism, hoist, and trolley systems, ensuring accurate load control in various directions. Unlike traditional incremental encoders, our products retain exact positions after power interruptions, eliminating the need for manual calibration and reducing downtime. Designed to withstand harsh environments, including dust, moisture, vibrations, and extreme temperatures, our encoders offer long-term reliability and durability. Elevate the efficiency and stability of your tower crane operations with BriterEncoders' innovative multi-turn absolute encoders.
0 notes
Text





GERO the GE Robot (1986) by Walt Disney Imagineering and General Electric Research & Development Center. GERO would ride around Future World a large scooter. “ “GERO” (short for “GE RObot”), is the newest robot to join the Horizons cast… and he’s destined to become one of Epcot’s most beloved characters. “GERO is probably the most sophisticated entertainment robot in the world,” says Dave Fink of General Electric. Designs for GERO originated at Walt Disney Imagineering in California. Veteran animator Xavier “X” Atencio created the inspirational drawings, using classic Disney character styling and proportions. GERO emerged from the drawing board as a fun-loving, friendly teen-ager – complete with a sporty scooter with room for riders! “The next step was to add the detailing that would give the robot a machined, hi-tech look,” says Designer Gil Keppler. At the Walt Disney Studios, artisans sculpted the robot in plaster, then shipped it to Walt Disney World where its Lexan body was fabricated, assembled, and painted in metallic silver & gold. As for the vehicle color… well, it just had to be red. After all, GERO’s a sporty guy! While GERO’s outward appearance was shaping up in Florida, scientists and technicians at the General Electric Research & Development Center were busily assembling the robot’s inner workings. Included in the 900-pound mountain of electronics are linear stepping motors, field effect transistor brakes, pulse-width modulated drives, incremental optical shaft encoder, fiber optics, laser disc player, 160 watts of biamped audio power and nine batteries – all controlled by 19 microcomputers! Yet with all that hi-tech hardware, there was one thing GERO still didn’t have – an education. It was time to go to school. At the GE R&D Center, computer technicians spent weeks raising the robot’s IQ from zero to GERO. By graduation time, GERO had learned to shake hands, wave goodbye, drive his scooter, converse and sing songs! He was ready to meet his public.” – Disney’s Exotic, Robotic Cast: “GERO” steals the show at EPCOT center, by Tom Fitzgerald.
26 notes
·
View notes
Text
0 notes