#Teleoperator Retrieval System
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
In 2020, 44% of users from Denmark used Tumblr daily.
Text
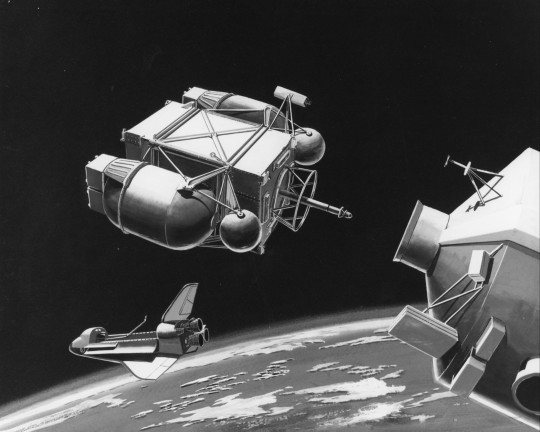
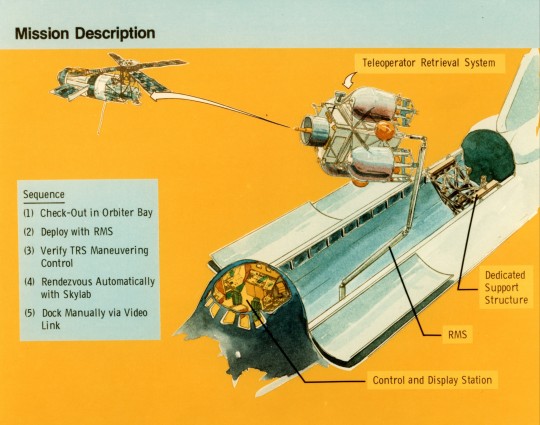
Earlier version of the Martin Marietta Teleoperator Retrieval System, which would have been used to boost the Skylab Orbital Workshop into a higher orbit by STS-2 Columbia.
"The Teleoperator Retrieval System (TRS), to be used in conjunction with the space shuttle in the early 1980s, approaches a satellite for docking and retrieval. This system will be used to survey, stabilize, and maneuver payloads in low earth orbit."
Date: 1977
NASA ID: S77-002623
#STS-2#Space Shuttle#Space Shuttle Columbia#Columbia#OV-102#Orbiter#NASA#Space Shuttle Program#Teleoperator Retrieval System#TRS#Martin Marietta#Reboost Mission#Skylab Orbital Workshop#Skylab OWS#Skylab#Skylab I#Skylab 1#SL-1#Space Station#Apollo Telescope Mount#ATM#Apollo Program#Apollo Applications Program#Cancelled#1977#concept art#undated#my post
35 notes
·
View notes
Text
So it's been a bit since the last substantial history post, so I'll ease back in, but we've got a real gem today: Interregional Skylab
So it's early 1979, and the Unovan Skylab station is starting to fall out of orbit. It goes without saying that this is bad. There had only been a few excursions to the station, and with the budget URSA had at the time, it felt like it could do better.
Conveniently, the Space Shuttle was progressing on-schedule, and would be ready to launch before Skylab dipped too low to save. Not ones to back down from a challenge, the Unovan engineers developed the Teleoperator Retrieval System, or TRS, for the purpose of boosting Skylab back to a workable altitude and allowing for future improvements.
On the second ever Space Shuttle flight, it rendezvoused with Skylab and deployed the TRS, which successfully reboosted Skylab.
But this isn't the end of the story. Skylab at the time was just one big tank with some solar panels and a telescope, and could easily be expanded. Originally, it was planned to just send up another S-IVB tank and have a docking module in the middle but as cooperation in space became more feasible following the Altaria-Starly mission of 1975 between Unovan astronauts and Sinnoese cosmonauts.
Anyway, over time, the station picked up both Sinnoese Shedin'ya and Kalosian modules, serving as humanity's first truly interregional space station before it's deorbit in the late 80s to make way for larger and more purpose-built stations.
It's development somewhat mirrored that of Moonlab, but with notable differences due to the launch vehicle constraints of the time.
#pokemon irl#rotomblr#unreality#pokeblogging#//Altaria = Apollo#//Starly = Soyuz#//Shedin'ya = Salyut
4 notes
·
View notes
Text
Revolutionary Space Robotics: The AI-Driven Future of Space Missions
Space exploration has been one of the biggest challenges for human beings. Now, as technology is growing up, robots are at the helm in exploring unknown territories. From Mars rovers to robotic arms at space stations, space robotics is revolutionizing methods of studying the cosmos while making missions safer, cheaper, and more efficient.

What Is Space Robotics?
Space robotics concerns the development and use of robots to support or replace humans in space missions. The robotic systems can be either autonomous or teleoperated for accomplishing different tasks in environments that are impossible or too dangerous or expensive for astronauts. Because space provides extreme conditions like high radiation, low gravity, and harsh temperatures, robots become an essential element in the process of exploring planets, constructing space stations, repairing satellites, and even cleaning up space debris.
Key Applications of Space Robotics
1.Planetary Exploration Rovers
The most visible example of space robotics is the planetary rover. These vehicles rove and analyze the surfaces of planets, collect samples, and send back data to Earth. Examples include the NASA Perseverance Rover, which is currently studying the geology of Mars and searching for evidence of past life; China’s Zhurong Rover, which is determining the climate and surface composition of Mars.
2. Robotic Arms and Manipulators
Robotics arms are considered an essential component in space stations and spacecrafts for various construction, repair, and maintenance activities. Some of the most popular arms include:
Canadarm2 (used by the International Space Station for capturing cargo spacecraft as well as assisting astronauts)
The European Robotic Arm (ERA), which helps to attach and repair into space.
3. Autonomous Spacecraft and Landers
Robotic landers and probes are used to explore deep space and planetary surfaces. These systems operate independently, collecting vital data. Examples include:
NASA’s OSIRIS-REx, which successfully retrieved samples from the asteroid Bennu.
One was India’s Chandrayaan-3, that landed on the Moon and relayed vital information about its surface.
4. Satellite Servicing and Space Debris Cleanup
As the number of satellites in orbit around Earth continues to increase, with thousands already up there, concerns about maintenance and debris cleanup are rising. Defunct satellites can be captured and repaired or removed safely by developing robotic systems. ESA’s e.Deorbit and ClearSpace-1 missions use robotic arms and automated systems to tackle this increasing problem.
5. Human Contingent in Space Missions
Space robots not only work on their own but also assist astronauts. Humanoid robots and AI assistants are capable of performing various kinds of labor. Some of the examples are:
NASA’s Robonaut: A humanoid robot capable of working in spacecraft.
Russia’s FEDOR is a humanoid, capable of piloting a spacecraft and doing maintenance work.
Challenges in Space Robotics
Despite all these advantages, space robots do face severe challenges:
Space Condition – Radiation, microgravity, and extreme temperature.
Energy Limitations: Most rely on solar power, which can be quite inconsistent in deep space.
Complex Autonomy –11Robots should make decisions instantly without human help.
The Future of Space Robotics
Advances in AI, robotics, and automation will define the future of space exploration as a high dependence on robotic systems. Developing self-repairing robots, AI-driven mission planning, and swarms of robotic explorers working together to achieve complex tasks is also part of research activities. The space robotics sector will take a leading role in defining the future of interplanetary exploration with the increased ambitions of Mars, Moon, and other interplanetary missions.
Conclusion
Space robotics has changed the very way of exploration of space into missions that are safer, smarter, and efficient. These machines, intelligent, will enable humans to explore planets and do impossible things that risk humans’ lives. From getting data on other worlds to supporting astronauts in space, robots have been the primary components of any space mission to be carried out in the near future.
As we look to the Moon, Mars, and beyond, space robots will continue to play a critical role in preparing for human exploration. Their capabilities are expanding the boundaries of what’s possible, bringing us closer to understanding the universe and enabling future space travel
0 notes
Text
Can robots run and jump like you?
The year is 2025, your apartment building is on fire. The fire has spread so much even the fire brigade can’t enter. All hope seems lost. But luckily for you there are still fireproof rescue-robots, who can easily walk through the smoke, break a locked door and push aside heavy obstacles. There are countless situations like these, inaccessible to human responders, where robots could save lives.
Engineers have already made huge progress on the development of 4-legged robots, recently MIT researchers even made a mini cheetah that can do a backflip. However, designing a 2-legged, more humanoid robot has proved difficult. Because a lot of balancing problems turn up when the robot has to exert a force on something. Still, engineers at MIT were able to develop a method to control balance in a 2-legged robot.
The robot looks like a machined torso and 2 legs. It is controlled by a human operator who wears a vest that sends signals about his motions to the robot. If the robot is about to tip over, the operator feels a corresponding pull. By which he has to rebalance himself and at the same time the robot. “It’s like wearing a heavy backpack,” says Joao Ramos, co-inventor of the approach.
Previously, Ramos built the 2-legged robot HERMES ( Highly Efficient Robotic Mechanisms and Electromechanical System) who could pour coffee in a cup, use an axe to chop wood, handle a fire extinguisher to put out a fire. This model only mimicked the movement of the upper body. Which made balance much easier to maintain - but at the cost of not being able to move.
Designing a walking robot brings a lot of balancing issues. So they created little HERMES, a miniature HERMES. The team came up with a model to represent balance. They found that the balance of a person at any time depends on the location of their center of mass in relation to their center of pressure, which is a point on the ground where an equivalent force to all supporting forces is exerted. They also found that this relation could be represented as an inversed pendulum. Think of a person swinging from side to side, with his feet rooted in place.
The researchers then did several experiments with this model and then applied it to little HERMES. They also developed an algorithm that translates the simple model of balance to the corresponding forces each of its feet would have to exert. As a result the little robot is able to jump, sprint and even walk on uneven ground while maintaining its balance without any support.
With this new and dynamic model of balancing, doors are opened for more advanced motions like lifting or throwing heavy objects. So robots assisting humans in rescue missions will most likely be a reality in the future.
Sources:
[1] Joao Ramos, Sangbae Kim. Dynamic locomotion synchronization of bipedal robot and human operator via bilateral feedback teleoperation. Science Robotics, 2019; 4 (35): eaav4282 DOI: 10.1126/scirobotics.aav4282
[2] Massachusetts Institute of Technology. (2019, October 30). Two-legged robot mimics human balance while running and jumping: New control system may enable humanoid robots to do heavy lifting and other physically demanding tasks. ScienceDaily. Retrieved December 2, 2019 from www.sciencedaily.com/releases/2019/10/191030151155.htm
2 notes
·
View notes
Text
What might have been...
Had the development of the shuttle not taken for goddamn ever, NASA had a plan to boost Skylab into a more stable orbit, after which astronauts could begin expanding the station for permanent habitiation:
1) An early Space Shuttle flight would have boosted Skylab to a higher orbit, adding five years of operational life. Plans were drawn up to either use the shuttle itself to push the station, but attaching a space tug – the Teleoperator Retrieval System (TRS) – to the station would have been more likely, based on astronauts' training for the task. Martin Marietta won the contract for US$26 million to design the apparatus. TRS would contain about three tons of propellant and had TV cameras so that it could be remotely operated from the ground or from the shuttle. The TRS was also designed for duties such as space construction and servicing and retrieving satellites the shuttle could not reach. After rescuing Skylab, the TRS would have remained in orbit for future use.

-A potential configuration for the TRS . | Illustration: Martin Marietta

-The TRS boosting Skylab into a new orbit. | Illustration: NASA
2) In two shuttle flights, Skylab would have been refurbished. In January 1982, the first mission would have attached a docking adapter and conducted repairs. In August 1983, a second crew would have replaced several system components.
3) In March 1984, shuttle crews would have attached a solar-powered Power Expansion Package, refurbished scientific equipment, and conducted 30- to 90-day missions using the Apollo Telescope Mount and the Earth resources experiments.

-A shuttle docked with Skylab during Phase III, with the PEP solar arrays extended. | Rendering: Junior Miranda.
4) Over the next five years, Skylab would have been expanded to accommodate six to eight astronauts, with a new large docking/interface module, additional logistics modules, Spacelab modules and pallets, and an orbital vehicle space dock using the shuttle's external tank.

#space#space exploration#space station#skylab#shuttle#space shuttle#nasa#the 70s#the 80s#what if#what might have been
190 notes
·
View notes
Text
Teleoperating robots with virtual reality
http://bit.ly/2zkEq0c
youtube
Consisting of a headset and hand controllers, CSAIL’s new VR system enables users to teleoperate a robot using an Oculus Rift headset. Photo: Jason Dorfman/MIT CSAIL
Certain industries have traditionally not had the luxury of telecommuting. Many manufacturing jobs, for example, require a physical presence to operate machinery.
But what if such jobs could be done remotely? Last week researchers from MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) presented a virtual reality (VR) system that lets you teleoperate a robot using an Oculus Rift headset.
The system embeds the user in a VR control room with multiple sensor displays, making it feel like they’re inside the robot’s head. By using hand controllers, users can match their movements to the robot’s movements to complete various tasks.
“A system like this could eventually help humans supervise robots from a distance,” says CSAIL postdoc Jeffrey Lipton, who was the lead author on a related paper about the system. “By teleoperating robots from home, blue-collar workers would be able to tele-commute and benefit from the IT revolution just as white-collars workers do now.”
The researchers even imagine that such a system could help employ increasing numbers of jobless video-gamers by “gameifying” manufacturing positions.
The team used the Baxter humanoid robot from Rethink Robotics, but said that it can work on other robot platforms and is also compatible with the HTC Vive headset.
Lipton co-wrote the paper with CSAIL Director Daniela Rus and researcher Aidan Fay. They presented the paper at the recent IEEE/RSJ International Conference on Intelligent Robots and Systems in Vancouver.
There have traditionally been two main approaches to using VR for teleoperation.
In a direct model, the user’s vision is directly coupled to the robot’s state. With these systems, a delayed signal could lead to nausea and headaches, and the user’s viewpoint is limited to one perspective.
In a cyber-physical model, the user is separate from the robot. The user interacts with a virtual copy of the robot and the environment. This requires much more data, and specialized spaces.
The CSAIL team’s system is halfway between these two methods. It solves the delay problem, since the user is constantly receiving visual feedback from the virtual world. It also solves the the cyber-physical issue of being distinct from the robot: Once a user puts on the headset and logs into the system, they’ll feel as if they’re inside Baxter’s head.
The system mimics the homunculus model of the mind — the idea that there’s a small human inside our brains controlling our actions, viewing the images we see, and understanding them for us. While it’s a peculiar idea for humans, for robots it fits: Inside the robot is a human in a virtual control room, seeing through its eyes and controlling its actions.
Using Oculus’ controllers, users can interact with controls that appear in the virtual space to open and close the hand grippers to pick up, move, and retrieve items. A user can plan movements based on the distance between the arm’s location marker and their hand while looking at the live display of the arm.
To make these movements possible, the human’s space is mapped into the virtual space, and the virtual space is then mapped into the robot space to provide a sense of co-location.
The system is also more flexible compared to previous systems that require many resources. Other systems might extract 2-D information from each camera, build out a full 3-D model of the environment, and then process and redisplay the data. In contrast, the CSAIL team’s approach bypasses all of that by simply taking the 2-D images that are displayed to each eye. (The human brain does the rest by automatically inferring the 3-D information.)
To test the system, the team first teleoperated Baxter to do simple tasks like picking up screws or stapling wires. They then had the test users teleoperate the robot to pick up and stack blocks.
Users successfully completed the tasks at a much higher rate compared to the direct model. Unsurprisingly, users with gaming experience had much more ease with the system.
Tested against current state-of-the-art systems, CSAIL’s system was better at grasping objects 95 percent of the time and 57 percent faster at doing tasks. The team also showed that the system could pilot the robot from hundreds of miles away; testing included controling Baxter at MIT from a hotel’s wireless network in Washington.
“This contribution represents a major milestone in the effort to connect the user with the robot’s space in an intuitive, natural, and effective manner.” says Oussama Khatib, a computer science professor at Stanford University who was not involved in the paper.
The team eventually wants to focus on making the system more scalable, with many users and different types of robots that can be compatible with current automation technologies.
The project was funded, in part, by the Boeing Company and the National Science Foundation.
0 notes
Link
Miniature Exercise Device (MED-2): The crew set up cameras in Node 3 and Cupola to capture video from multiple views of the Advanced Resistive Exercise Device (ARED) and MED-2 hardware, applied body markers, performed exercises and transferred video for downlink. The microgravity environment of space weakens muscle and bone, so orbiting crew members spend significant amounts of time exercising with equipment that is large and bulky. MED-2 aims to demonstrate that small robotic actuators can provide motion and resistance for crew workout sessions during long-duration space missions with exercise equipment that is smaller in size and mass that equipment currently being used on the ISS. ADvanced Space Experiment Processor (ADSEP): The crew will removed Cell Culturing (CellCult) cassettes from ADSEP, inserted cells into each cassette and reinserted them into ADSEP. ADSEP is a thermally controlled facility that accommodates up to three cassette-based experiments that can be independently operated. A collection of experiment cassettes are used to accommodate experiments in cell technology, multiphase fluids, solution chemistry, separation science, microencapsulation, and crystal growth. For CellCult investigations, each cassette contains a rotating filtered bioreactor, a reservoir for fresh media, two peristaltic pumps, a waste reservoir, and up to 6 sample-collection or reagent containers connected by a manifold to the reactor. Cultures can be operated in continuous perfusion, batch fed, static, or sampling modes. The removal of samples and the addition of additives to the reactor volume can be programmed or teleoperated. Microbial Tracking-2 (MT-2): The crew collected saliva samples for the Microbial Tracking-2 investigation and placed them in a Minus Eighty Degree Celsius Laboratory Freezer for ISS (MELFI). After the samples are returned to Earth, a molecular analysis of the RNA and DNA will be conducted to identify the specific microbes that are present on ISS. MT-2 monitors the different types of microbes on ISS over a 1-year period and how they change over time. Vascular Echo Ultrasound: With guidance from a ground expert, a crewmember performed an ultrasound of the femoral artery on their right leg after a one minute light leg exercise. The Canadian Space Agency (CSA) Vascular Echo investigation examines changes in blood vessels and the heart while the crew members are in space, and then upon their return to Earth. The results could provide insight into potential countermeasures to help maintain crew member health. Agenzia Spaziale Italiana (ASI) Biomission: The crew deinstalled Biomission experiment containers from the Kubik 5 facility in the Columbus module, completing the fifth run. Each of the containers will be placed into a Minus Eighty Degree Celsius Laboratory Freezer for ISS (MELFI) in order to preserve the scientific samples. Kubik 5 supports Biomission investigations by providing a small controlled-temperature incubator / cooler for the study of biological samples in a microgravity environment. Kubik is equipped with removable inserts designed for self-contained, automatic experiments using seeds, cells, and small animals. Lighting Effects: This morning a crewmember provided a sleep log entry for the Lighting Effects investigation. The light bulbs on the ISS are being replaced with a new system designed for improved crew health and wellness. Fluorescent bulbs are being replaced with solid-state light-emitting diodes (LEDs) that have adjustable intensity and color. Investigators will determine if the new lights improve crew circadian rhythms, sleep, and cognitive performance. Results from this investigation also have implications for people on Earth who use electric lights. Today’s Planned Activities All activities were completed unless otherwise noted. Lighting Effects Sleep Log Entry – Subject Columbus Circadian Rhythms items repack Video for episode 5 of “Space Yura and Nura” cartoon DUBRAVA. Observation and photography using Photo Equipment Preparation of Reports for Roscosmos web site and social media Recording Greetings Video ECON-M. Observation and photography Regenerative Environmental Control and Life Support System (ECLSS) Recycle Tank Drain Miniature Exercise Device Hardware Gather Terminate discharge of the 3rd Orlan 825М Battery Pack (Stow in spares kit ФГБ1ПГО_2_221_1) Soyuz 735 Angular Rate Integration Unit (БИУС) telemetry setup JEM System Laptop Terminal Reboot Regenerative Environmental Control and Life Support System (ECLSS) Recycle Tank Drain Part 2 Teardown of charger [ЗУ-С] setup, start Miniature Exercise Device ARED Session 1st Crew Bone Densitometer Express Rack Relocation JEM Camera Robot Activation On MCC GO Demating TLM connectors from ЗУ-С Health Maintenance System (HMS) OCT Setup JEM Camera Robot Shooting Teardown of battery charger [ЗУ-С] setup, end Hardware prepack for return and disposal on Soyuz 735 Miniature Exercise Device ARED Session 2nd Crew JEM Camera Robot Deactivation Temperature and Humidity Control (THC) Intermodule Ventilation (IMV) Flow Measurement Survey Regenerative Environmental Control and Life Support System (RGN) Wastewater Storage Tank Assembly (WSTA) Fill DAN. Experiment Session Health Maintenance System (HMS) – OCT Exam PROBIOVIT. Insertion of Probiotic kit No.1 in Glovebox-S and turning the light on Health Maintenance System (HMS) OCT Stow Regenerative Environmental Control and Life Support System (RGN) Wastewater Storage Tank Assembly (WSTA) Fill Crew Departure Preparations for Return to Earth PROBIOVIT. Filling Kit No. 1 Water container from СРВК In Flight Maintenance (IFM) Waste and Hygiene Compartment (WHC) Full Fill Space Technology and Advanced Research Systems Locker Installation PROBIOVIT. Photography of water filling of the container from [СРВК] PROBIOVIT. Filling Kit No. 1 Product container in Glovebox-S PROBIOVIT. Photography during filling in the Glovebox In Flight Maintenance (IFM) Waste and Hygiene Compartment (WHC) Full Fill PROBIOVIT. Kite retrieval from Glovebox-S, Probiotic No.1 kit transfer and setup in ТБУ-В No.02 at +37 deg C / Verification of ИП-1 Flow Sensor Position ADSEP MELFI Removal #3 Crew Departure Preparations for Return to Earth Regenerative Environmental Control and Life Support System (RGN) Wastewater Storage Tank Assembly (WSTA) Fill Advanced Space Experiment Processor Cell Collection Filling (separation) of ЕДВ (КОВ) for Elektron or ЕДВ-СВ. Fill ЕДВ-КОВ cover No.1201 (00068432R, ФГБ1ПГО_1_110) from ЕДВ cover No.1296 (00071688R, СМ1ПрК) Vascular Echo Exercise PDOP Measurement PROBIOVIT. Setup of Probiotic kit No.2 in Glovebox-S Regenerative Environmental Control and Life Support System (ECLSS) Recycle Tank Fill Part 3 Environmental Health System (EHS) Grab Sample Container (GSC) Sampling Operations PROBIOVIT. Filling Kit No.2 Water container from [СРВК] PROBIOVIT. Filling […] August 24, 2017 at 10:00AM from NASA https://go.nasa.gov/2w4Noit via IFTTT
0 notes
Text
ISS Daily Summary Report – 8/24/2017
Miniature Exercise Device (MED-2): The crew set up cameras in Node 3 and Cupola to capture video from multiple views of the Advanced Resistive Exercise Device (ARED) and MED-2 hardware, applied body markers, performed exercises and transferred video for downlink. The microgravity environment of space weakens muscle and bone, so orbiting crew members spend significant amounts of time exercising with equipment that is large and bulky. MED-2 aims to demonstrate that small robotic actuators can provide motion and resistance for crew workout sessions during long-duration space missions with exercise equipment that is smaller in size and mass that equipment currently being used on the ISS. ADvanced Space Experiment Processor (ADSEP): The crew will removed Cell Culturing (CellCult) cassettes from ADSEP, inserted cells into each cassette and reinserted them into ADSEP. ADSEP is a thermally controlled facility that accommodates up to three cassette-based experiments that can be independently operated. A collection of experiment cassettes are used to accommodate experiments in cell technology, multiphase fluids, solution chemistry, separation science, microencapsulation, and crystal growth. For CellCult investigations, each cassette contains a rotating filtered bioreactor, a reservoir for fresh media, two peristaltic pumps, a waste reservoir, and up to 6 sample-collection or reagent containers connected by a manifold to the reactor. Cultures can be operated in continuous perfusion, batch fed, static, or sampling modes. The removal of samples and the addition of additives to the reactor volume can be programmed or teleoperated. Microbial Tracking-2 (MT-2): The crew collected saliva samples for the Microbial Tracking-2 investigation and placed them in a Minus Eighty Degree Celsius Laboratory Freezer for ISS (MELFI). After the samples are returned to Earth, a molecular analysis of the RNA and DNA will be conducted to identify the specific microbes that are present on ISS. MT-2 monitors the different types of microbes on ISS over a 1-year period and how they change over time. Vascular Echo Ultrasound: With guidance from a ground expert, a crewmember performed an ultrasound of the femoral artery on their right leg after a one minute light leg exercise. The Canadian Space Agency (CSA) Vascular Echo investigation examines changes in blood vessels and the heart while the crew members are in space, and then upon their return to Earth. The results could provide insight into potential countermeasures to help maintain crew member health. Agenzia Spaziale Italiana (ASI) Biomission: The crew deinstalled Biomission experiment containers from the Kubik 5 facility in the Columbus module, completing the fifth run. Each of the containers will be placed into a Minus Eighty Degree Celsius Laboratory Freezer for ISS (MELFI) in order to preserve the scientific samples. Kubik 5 supports Biomission investigations by providing a small controlled-temperature incubator / cooler for the study of biological samples in a microgravity environment. Kubik is equipped with removable inserts designed for self-contained, automatic experiments using seeds, cells, and small animals. Lighting Effects: This morning a crewmember provided a sleep log entry for the Lighting Effects investigation. The light bulbs on the ISS are being replaced with a new system designed for improved crew health and wellness. Fluorescent bulbs are being replaced with solid-state light-emitting diodes (LEDs) that have adjustable intensity and color. Investigators will determine if the new lights improve crew circadian rhythms, sleep, and cognitive performance. Results from this investigation also have implications for people on Earth who use electric lights. Today’s Planned Activities All activities were completed unless otherwise noted. Lighting Effects Sleep Log Entry – Subject Columbus Circadian Rhythms items repack Video for episode 5 of “Space Yura and Nura” cartoon DUBRAVA. Observation and photography using Photo Equipment Preparation of Reports for Roscosmos web site and social media Recording Greetings Video ECON-M. Observation and photography Regenerative Environmental Control and Life Support System (ECLSS) Recycle Tank Drain Miniature Exercise Device Hardware Gather Terminate discharge of the 3rd Orlan 825М Battery Pack (Stow in spares kit ФГБ1ПГО_2_221_1) Soyuz 735 Angular Rate Integration Unit (БИУС) telemetry setup JEM System Laptop Terminal Reboot Regenerative Environmental Control and Life Support System (ECLSS) Recycle Tank Drain Part 2 Teardown of charger [ЗУ-С] setup, start Miniature Exercise Device ARED Session 1st Crew Bone Densitometer Express Rack Relocation JEM Camera Robot Activation On MCC GO Demating TLM connectors from ЗУ-С Health Maintenance System (HMS) OCT Setup JEM Camera Robot Shooting Teardown of battery charger [ЗУ-С] setup, end Hardware prepack for return and disposal on Soyuz 735 Miniature Exercise Device ARED Session 2nd Crew JEM Camera Robot Deactivation Temperature and Humidity Control (THC) Intermodule Ventilation (IMV) Flow Measurement Survey Regenerative Environmental Control and Life Support System (RGN) Wastewater Storage Tank Assembly (WSTA) Fill DAN. Experiment Session Health Maintenance System (HMS) – OCT Exam PROBIOVIT. Insertion of Probiotic kit No.1 in Glovebox-S and turning the light on Health Maintenance System (HMS) OCT Stow Regenerative Environmental Control and Life Support System (RGN) Wastewater Storage Tank Assembly (WSTA) Fill Crew Departure Preparations for Return to Earth PROBIOVIT. Filling Kit No. 1 Water container from СРВК In Flight Maintenance (IFM) Waste and Hygiene Compartment (WHC) Full Fill Space Technology and Advanced Research Systems Locker Installation PROBIOVIT. Photography of water filling of the container from [СРВК] PROBIOVIT. Filling Kit No. 1 Product container in Glovebox-S PROBIOVIT. Photography during filling in the Glovebox In Flight Maintenance (IFM) Waste and Hygiene Compartment (WHC) Full Fill PROBIOVIT. Kite retrieval from Glovebox-S, Probiotic No.1 kit transfer and setup in ТБУ-В No.02 at +37 deg C / Verification of ИП-1 Flow Sensor Position ADSEP MELFI Removal #3 Crew Departure Preparations for Return to Earth Regenerative Environmental Control and Life Support System (RGN) Wastewater Storage Tank Assembly (WSTA) Fill Advanced Space Experiment Processor Cell Collection Filling (separation) of ЕДВ (КОВ) for Elektron or ЕДВ-СВ. Fill ЕДВ-КОВ cover No.1201 (00068432R, ФГБ1ПГО_1_110) from ЕДВ cover No.1296 (00071688R, СМ1ПрК) Vascular Echo Exercise PDOP Measurement PROBIOVIT. Setup of Probiotic kit No.2 in Glovebox-S Regenerative Environmental Control and Life Support System (ECLSS) Recycle Tank Fill Part 3 Environmental Health System (EHS) Grab Sample Container (GSC) Sampling Operations PROBIOVIT. Filling Kit No.2 Water container from [СРВК] PROBIOVIT. Filling […] from NASA http://ift.tt/2wuelwW via IFTTT
0 notes
Text
ISS Daily Summary Report – 1/31/2017
64 Progress (64P) Undock: 64P successfully undocked from the Docking Compartment 1 (DC-1) port this morning at 8:25 AM CST. Deorbit burn was at 11:34 AM CST today followed by atmospheric entry and destruction. Crew Autonomous Scheduling Test (CAST): The third of five sessions was completed today. The objective of this session was to allow the crew to self-schedule and execute a flexible afternoon using the Playbook tool. This is the final step before the crewmember will schedule a full crew day. Space missions beyond low-Earth orbit require new approaches to daily operations between ground and crew to account for significant communication delays. One approach is increased autonomy for crews, or Autonomous Mission Operations. The CAST investigation analyzes whether crews can develop plans in a reasonable period of time with appropriate input, whether proximity of planners to the planned operations increases efficiency, and if crew members are more satisfied when given a role in plan development. Multi-Purpose Experiment Platform (MPEP) and Small Fine Arm Attachment Mechanism (SAM) Removal: The crew extended the JEM Airlock (JEMAL) slide table into the cabin and removed the MPEP and SAM facilities. On Thursday, the JEMAL will be depressed and the empty Slide Table will be extended. Ground controllers will be removing an Exposed Facility Unit (EFU) from the JEM External Facility (EF) and installing it on the Slide Table to make space on the EF for the High Definition Television Camera –Exposed Facility 2 (HDTV-EF2) experiment. HDTV-EF2 is a high-definition television camera system, which is used for earth observation from the ISS. Story Time From Space – Pendulous Demonstration: The crew configured and performed the pendulous experiment to demonstrate pendulous motion in a microgravity environment. The crew aligned the support stand (fulcrum) on the wall such that the beam points in the direction of the ISS’s velocity vector and is able to freely rotate and point towards Earth. Story Time From Space combines science literacy outreach with simple demonstrations recorded aboard the ISS. Crew members read five science, technology, engineering and mathematics-related children’s books in orbit, and complete simple science concept experiments. Crew members videotape themselves reading the books and completing demonstrations. Video and data collected during the demonstrations are downlinked to the ground and posted in a video library with accompanying educational materials. This is a videotaped narrated demonstration based on the children’s (K-8) book Max Goes to the Moon. Synchronized Position Hold, Engage, Reorient, Experimental Satellites (SPHERES) Slosh Tank Maneuvers: The crew, with ground support, performed manual maneuvers using the two partially filled tanks from the SPHERES Slosh experiment. Following ground instructions for the maneuvers, the crew observed the bubble formation in tanks of different fill quantities using single and double tank combinations and motions. The maneuvers that the crew will perform will provide valuable data for potential future in-space propellant storage required for deep space exploration. Several concepts include a configuration where two partially filled tanks are spinning in tandem. The SPHERES-Slosh investigation uses small robotic satellites to examine how liquids move around inside containers in microgravity. Bigelow Expandable Activity Module (BEAM) Modal Test Preparation: In preparation for Thursday’s BEAM modal test, the crew gathered and configured the necessary equipment including Space Acceleration Measurement System (SAMS) sensors and video cameras. BEAM is an experimental expandable capsule attached to the Node 3 aft Common Berthing Mechanism (CBM) port. The BEAM investigation will run approximately 2 years. BEAM is not an occupied module, and not used for stowage. During this time, BEAM is constantly monitored for temperature, pressure, and radiation. Periodically, four times per year, the ISS crew enters the module to collect data and check on its structural condition. Following the BEAM investigation, the module will be released from the ISS and burn up on reentry into the atmosphere. Radiation Dosimetry Inside ISS-Neutron (RaDI-N): After retrieving the RaDI-N hardware from the Russian crewmembers, a USOS crewmember deployed eight Space Bubble Detectors in Node 3 for the Radi-N2 experiment. The Canadian Space Agency (CSA) RaDI-N investigation will be conducted by measuring neutron radiation levels while onboard the ISS. RaDI-N uses bubble detectors as neutron monitors which have been designed to only detect neutrons and ignore all other radiation. Haptics-2: The crew completed two Haptics-2 protocols in coordination with ground support teams. The first protocol attempted to quantify the performance characteristics of the communication channel between the ISS and ground teams via software connections and data measurements. The aim of the second protocol was to demonstrate bilateral teleoperation with force-feedback between ISS and ground facilities. During the protocol the crew was asked to move a master one Degree of Freedom (1DOF) Setup joystick inside the Columbus module, in order to control in real-time the slave robotic joint located on Earth at European Space Technology Center (ESTEC). The crew was able to successfully complete the 15 trials, and due to crew efficiency repeated trials 1-11 a second time. The crew also executed a remote hand-shake with the members of the science team at the slave work-site. Microgravity Science Laboratory (MSL) Sample Cartridge Assembly (SCA) Exchange: The crew performed an exchange of the SCAs, replacing the used cartridge with the next in the series, Solidification along an Eutectic Path in Ternary Alloys (SETA)2-#9. The SETA investigation looks at how two phases that form together organize into lamellar, or fiber, structures when cooling Aluminum (Copper-Silver Alloys). Both, the SETA and Metastable Solidification of Composites (METCOMP) projects provide benchmark samples that will enable numerical model tests that aim to predict these structures. Lab Carbon Dioxide Removal Assembly (CDRA) Valve Power Cable Installation: Due to the intermittent Remote Power Controller (RPC) trip on the Lab CDRA, the CDRA Valve Power Cable was installed in order to isolate this trip. The six valves within CDRA are currently all powered from a single RPC. This new cable will initially power half of the six valves via a different RPC. Based on the results of the troubleshooting, the cable will be reconfigured to further isolate the trip source. Today’s Planned Activities […] from NASA http://go.nasa.gov/2kgzEcI via IFTTT | Java Wisata
0 notes
Text

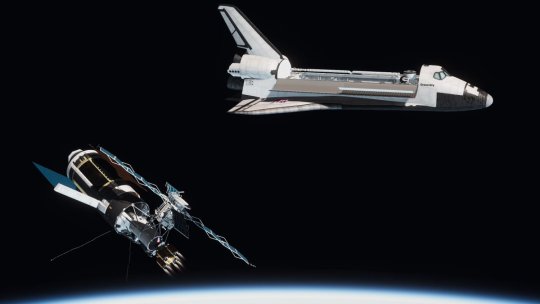


"Skylab with the Teleoperator Retrieval System docked for its first post-Apollo reboost, ahead of refurbishment by a series of Space Shuttle missions"
Render by brickmack: link
#Skylab Orbital Workshop#Skylab OWS#Skylab#Space Station#Apollo Telescope Mount#ATM#NASA#Apollo Program#Apollo Applications Program#Teleoperator Retrieval System#TRS#SpaceTug#Space Tug#artwork#what if#1970s#my post
20 notes
·
View notes
Text
Cancelled Missions: original STS-2 or Skylab reboost
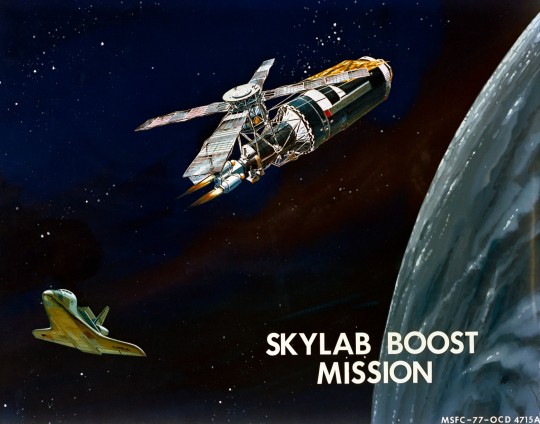
The Teleoperator Retrieval System (TRS) was planned to be deployed on the Space Shuttle mission to Skylab. This spacecraft would be used to re-boost the Skylab space station to a higher orbit for refurbishment for use for future shuttle missions.

Early version of the shuttle and TRS

It was to be built by Martin Marietta and would have been launched on STS-2 Columbia in July 1979. The prime crew was Fred Haise and Jack R. Lousma. The mission was cancelled on April 1979 when it was determined the shuttle would not be ready in time to save Skylab. There was some discussion about launching the TRS on an unmanned rocket but NASA decided to focus its efforts on the shuttle and the space station was allowed to re-enter the atmosphere on July 11, 1979.
Date: 1978
NASA ID: S76-130249A, S78-23630, S78-23631
Posted by Drew Granston on Flickr: link
#Teleoperator Retrieval System#TRS#Martin Marietta#Reboost Mission#Skylab Orbital Workshop#Skylab OWS#Skylab#Skylab I#Skylab 1#SL-1#Space Station#Apollo Telescope Mount#ATM#Apollo Program#Apollo Applications Program#STS-2#Space Shuttle#Space Shuttle Columbia#Columbia#OV-102#Orbiter#NASA#Space Shuttle Program#concept art#undated#1978#July#Cancelled#Cancelled Mission#my post
24 notes
·
View notes
Text


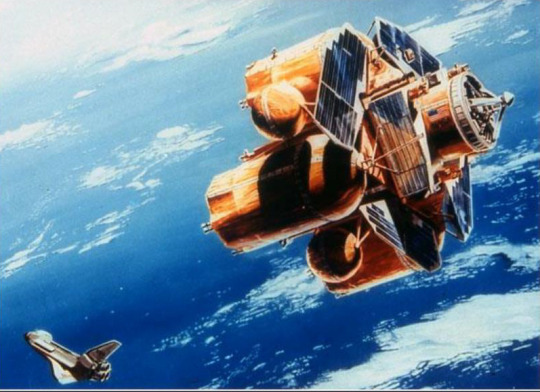
What could have been had the shuttle been ready earlier or the station had been boosted earlier by the Teleoperator Retrieval System launched on an unmanned mission.
This render shows the phase III (penultimate refurbished) of Skylab, circa 1984.
source
#what if#Shuttle Skylab#Skylab Orbital Workshop#Skylab OWS#Skylab#Skylab I#Skylab 1#SL-1#Space Station#Apollo Telescope Mount#ATM#NASA#Apollo Program#Apollo Applications Program#Space Shuttle#Orbiter#Space Shuttle Program#artwork#1984#my post
6 notes
·
View notes
Link
Miniature Exercise Device (MED-2): The crew set up cameras in Node 3 and Cupola to capture video from multiple views of the Advanced Resistive Exercise Device (ARED) and MED-2 hardware, applied body markers, performed exercises and transferred video for downlink. The microgravity environment of space weakens muscle and bone, so orbiting crew members spend significant amounts of time exercising with equipment that is large and bulky. MED-2 aims to demonstrate that small robotic actuators can provide motion and resistance for crew workout sessions during long-duration space missions with exercise equipment that is smaller in size and mass that equipment currently being used on the ISS. ADvanced Space Experiment Processor (ADSEP): The crew will removed Cell Culturing (CellCult) cassettes from ADSEP, inserted cells into each cassette and reinserted them into ADSEP. ADSEP is a thermally controlled facility that accommodates up to three cassette-based experiments that can be independently operated. A collection of experiment cassettes are used to accommodate experiments in cell technology, multiphase fluids, solution chemistry, separation science, microencapsulation, and crystal growth. For CellCult investigations, each cassette contains a rotating filtered bioreactor, a reservoir for fresh media, two peristaltic pumps, a waste reservoir, and up to 6 sample-collection or reagent containers connected by a manifold to the reactor. Cultures can be operated in continuous perfusion, batch fed, static, or sampling modes. The removal of samples and the addition of additives to the reactor volume can be programmed or teleoperated. Microbial Tracking-2 (MT-2): The crew collected saliva samples for the Microbial Tracking-2 investigation and placed them in a Minus Eighty Degree Celsius Laboratory Freezer for ISS (MELFI). After the samples are returned to Earth, a molecular analysis of the RNA and DNA will be conducted to identify the specific microbes that are present on ISS. MT-2 monitors the different types of microbes on ISS over a 1-year period and how they change over time. Vascular Echo Ultrasound: With guidance from a ground expert, a crewmember performed an ultrasound of the femoral artery on their right leg after a one minute light leg exercise. The Canadian Space Agency (CSA) Vascular Echo investigation examines changes in blood vessels and the heart while the crew members are in space, and then upon their return to Earth. The results could provide insight into potential countermeasures to help maintain crew member health. Agenzia Spaziale Italiana (ASI) Biomission: The crew deinstalled Biomission experiment containers from the Kubik 5 facility in the Columbus module, completing the fifth run. Each of the containers will be placed into a Minus Eighty Degree Celsius Laboratory Freezer for ISS (MELFI) in order to preserve the scientific samples. Kubik 5 supports Biomission investigations by providing a small controlled-temperature incubator / cooler for the study of biological samples in a microgravity environment. Kubik is equipped with removable inserts designed for self-contained, automatic experiments using seeds, cells, and small animals. Lighting Effects: This morning a crewmember provided a sleep log entry for the Lighting Effects investigation. The light bulbs on the ISS are being replaced with a new system designed for improved crew health and wellness. Fluorescent bulbs are being replaced with solid-state light-emitting diodes (LEDs) that have adjustable intensity and color. Investigators will determine if the new lights improve crew circadian rhythms, sleep, and cognitive performance. Results from this investigation also have implications for people on Earth who use electric lights. Today’s Planned Activities All activities were completed unless otherwise noted. Lighting Effects Sleep Log Entry – Subject Columbus Circadian Rhythms items repack Video for episode 5 of “Space Yura and Nura” cartoon DUBRAVA. Observation and photography using Photo Equipment Preparation of Reports for Roscosmos web site and social media Recording Greetings Video ECON-M. Observation and photography Regenerative Environmental Control and Life Support System (ECLSS) Recycle Tank Drain Miniature Exercise Device Hardware Gather Terminate discharge of the 3rd Orlan 825М Battery Pack (Stow in spares kit ФГБ1ПГО_2_221_1) Soyuz 735 Angular Rate Integration Unit (БИУС) telemetry setup JEM System Laptop Terminal Reboot Regenerative Environmental Control and Life Support System (ECLSS) Recycle Tank Drain Part 2 Teardown of charger [ЗУ-С] setup, start Miniature Exercise Device ARED Session 1st Crew Bone Densitometer Express Rack Relocation JEM Camera Robot Activation On MCC GO Demating TLM connectors from ЗУ-С Health Maintenance System (HMS) OCT Setup JEM Camera Robot Shooting Teardown of battery charger [ЗУ-С] setup, end Hardware prepack for return and disposal on Soyuz 735 Miniature Exercise Device ARED Session 2nd Crew JEM Camera Robot Deactivation Temperature and Humidity Control (THC) Intermodule Ventilation (IMV) Flow Measurement Survey Regenerative Environmental Control and Life Support System (RGN) Wastewater Storage Tank Assembly (WSTA) Fill DAN. Experiment Session Health Maintenance System (HMS) – OCT Exam PROBIOVIT. Insertion of Probiotic kit No.1 in Glovebox-S and turning the light on Health Maintenance System (HMS) OCT Stow Regenerative Environmental Control and Life Support System (RGN) Wastewater Storage Tank Assembly (WSTA) Fill Crew Departure Preparations for Return to Earth PROBIOVIT. Filling Kit No. 1 Water container from СРВК In Flight Maintenance (IFM) Waste and Hygiene Compartment (WHC) Full Fill Space Technology and Advanced Research Systems Locker Installation PROBIOVIT. Photography of water filling of the container from [СРВК] PROBIOVIT. Filling Kit No. 1 Product container in Glovebox-S PROBIOVIT. Photography during filling in the Glovebox In Flight Maintenance (IFM) Waste and Hygiene Compartment (WHC) Full Fill PROBIOVIT. Kite retrieval from Glovebox-S, Probiotic No.1 kit transfer and setup in ТБУ-В No.02 at +37 deg C / Verification of ИП-1 Flow Sensor Position ADSEP MELFI Removal #3 Crew Departure Preparations for Return to Earth Regenerative Environmental Control and Life Support System (RGN) Wastewater Storage Tank Assembly (WSTA) Fill Advanced Space Experiment Processor Cell Collection Filling (separation) of ЕДВ (КОВ) for Elektron or ЕДВ-СВ. Fill ЕДВ-КОВ cover No.1201 (00068432R, ФГБ1ПГО_1_110) from ЕДВ cover No.1296 (00071688R, СМ1ПрК) Vascular Echo Exercise PDOP Measurement PROBIOVIT. Setup of Probiotic kit No.2 in Glovebox-S Regenerative Environmental Control and Life Support System (ECLSS) Recycle Tank Fill Part 3 Environmental Health System (EHS) Grab Sample Container (GSC) Sampling Operations PROBIOVIT. Filling Kit No.2 Water container from [СРВК] PROBIOVIT. Filling […] from ISS On-Orbit Status Report https://go.nasa.gov/2w4Noit
0 notes
Link
Solar Eclipse Viewing: The crew removed scratch panes from Cupola windows #4 and #6 and cleaned the window #3 scratch pane. The crew then took both HD video and still images of the moon’s umbra on Earth from the Cupola. They also obtained images of both the sun and the moon. In addition, the P1 Lower Outboard External High Definition Camera (EHDC) was used to capture HD video of the moon’s umbra on Earth. Lung Tissue: On Saturday the crew set up hardware in the Microgravity Science Glovebox (MSG) for Lung Tissue operations. They also took samples and inserted them in to a Minus Eighty Degree Celsius Laboratory Freezer for ISS (MELFI) and fixed media in Tissue Bags. The Lung Tissue investigation uses the microgravity environment of space to test strategies for growing new lung tissue. Using the latest bioengineering techniques, the Lung Tissue experiment cultures different types of lung cells in controlled conditions onboard the ISS. The cells are grown in a specialized framework that supplies them with critical growth factors so that scientists can observe how gravity affects growth and specialization as cells become new lung tissue. Kubik: On Saturday and Sunday the crew deinstalled Agenzia Spaziale Italiana (ASI) Biomission experiment containers from the Kubik 5 facility in the Columbus module, completing Runs 2 and 3. Later today they will deinstall another experiment container, completing Run 4. Each of the containers is inserted into a Minus Eighty Degree Celsius Laboratory Freezer for ISS (MELFI) in order to preserve the scientific samples. Kubik 5 is supporting Biomission investigations by providing a small controlled-temperature incubator / cooler for the study of biological samples in a microgravity environment. Kubik is equipped with removable inserts designed for self-contained, automatic experiments using seeds, cells, and small animals. ADvanced Space Experiment Processor (ADSEP): On Saturday the crew removed Cell Culturing (CellCult) cassettes from ADSEP, inserted cells into each cassette and then reinserted them into ADSEP. ADSEP is a thermally controlled facility that accommodates up to three cassette-based experiments that can be independently operated. Its companion hardware consists of a collection of several experiment cassettes, each doubly or triply contained, that accommodate experiments in cell technology, model organisms, multiphase fluids, solution chemistry, separation science, microencapsulation, and crystal growth. For CellCult investigations, each cassette contains a single 50 milliliter rotating filtered bioreactor, a reservoir for fresh media, two programmable peristaltic pumps, a waste reservoir, and up to six sample-collection or reagent containers connected by manifold to the reactor. Cultures can be operated in continuous perfusion, batch fed, static, or sampling mode. Both the removal of samples and the addition of additives to the reactor volume can be programmed or teleoperated. Aeration and humidity control are available NanoRacks Module 9: On Saturday the crew activated mixture tubes for the NanoRacks Module 9 second operations session in support of the NanoRacks-National Center for Earth and Space Science-Casper (NanoRacks-NCESSE-Casper) investigation. NCESSE supports various schools and student-designed experiments that address challenges of living and working in space. The program is also a key initiative for U.S. science, technology, engineering and math (STEM) that strives to educate and inspire the next generation of scientists and engineers to work on the space program. Lighting Effects: On Sunday a crewmember provided a sleep log entry for the Lighting Effects investigation. The light bulbs on the ISS are being replaced with a new system designed for improved crew health and wellness. Fluorescent bulbs are being replaced with solid-state light-emitting diodes (LEDs) that have adjustable intensity and color. Investigators will determine if the new lights improve crew circadian rhythms, sleep, and cognitive performance. Results from this investigation also have implications for people on Earth who use electric lights. Cardio Ox: A 50S crewmember collected blood and urine samples today to satisfy their Return minus 15 Day (R-15) Cardio Ox requirements. By collecting Cardio Ox ultrasound and ECG data, along with blood and urine samples, scientists are trying to determine whether biological markers of oxidative and inflammatory stress are elevated during and after space flight and whether this results in an increased, long-term risk of atherosclerosis in astronauts. Fine Motor Skills (FMS): Today a 51S crewmember completed their tenth FMS session. The FMS investigation studies how the fine motor skills are effected by long-term microgravity exposure, different phases of microgravity adaptation, and sensorimotor recovery after returning to Earth gravity. The goal of the investigation is to determine how fine motor performance in microgravity varies over the duration of six-month and year-long space missions; how fine motor performance on orbit compares with that of a closely matched participant on Earth; and how performance varies before and after gravitational transitions, including periods of early flight adaptation and very early/near immediate post-flight periods. Today’s Planned Activities All activities were completed unless otherwise noted. ASI Experiment Container insertion into MELFI Experiment Container deinstallation Combustion Integrated Rack Alignment Guide Removal Cupola Window 4 Scratch Pane Replacement Cupola Window 4 Scratch Pane Removal Cupola Window 6 Scratch Pane Replacement Cupola Window 6 Scratch Pane Removal Cupola Window 3 Scratch Pane Cleaning Exploration script recording Synthetic biology script recording Fine Motor Skills Experiment Test – Subject Handover Feedback Questions HRF Generic Frozen Blood Collection – Operator HRF Generic Frozen Blood Collection 30 Minutes – Subject HRF Generic Frozen Blood Collection Conclude Stow HRF Generic Sample MELFI Insertion Operations HRF Generic Sample MELFI Retrieval Insertion Operations HRF Generic Refrigerated Centrifuge Configuration HRF Generic Refrigerated Centrifuge Spin Conclude HRF Generic Urine Collection Female – Subject HRF Generic Urine Collection Stow Lighting Effects Sleep Log Entry – Subject Mouse Epigenetics Item Gathering Multi-Omics-Mouse Mouse Habitat Cage Unit Maintenance Familiarization Multi-Omics-Mouse Cage Maintenance for Water 1 (MG) and Food Cartridge Exchange for M1. Photo/TV Camcorder Solar Eclipse Deactivation Photo/TV Camcorder Solar Eclipse Setup Photo/TV D4 Solar Eclipse Deactivation Photo/TV D4 camera setups for the solar eclipse Photo/TV Solar Eclipse Rodent Research Water Box and Light Check Surface Tension Containment MWA Assist Surface Tension Containment MWA Operations Surface Tension Containment MWA Preparation XF305 Camcorder Setup Mate a […] August 21, 2017 at 10:00AM from NASA https://go.nasa.gov/2g1TVVj via IFTTT
0 notes
Link
Solar Eclipse Viewing: The crew removed scratch panes from Cupola windows #4 and #6 and cleaned the window #3 scratch pane. The crew then took both HD video and still images of the moon’s umbra on Earth from the Cupola. They also obtained images of both the sun and the moon. In addition, the P1 Lower Outboard External High Definition Camera (EHDC) was used to capture HD video of the moon’s umbra on Earth. Lung Tissue: On Saturday the crew set up hardware in the Microgravity Science Glovebox (MSG) for Lung Tissue operations. They also took samples and inserted them in to a Minus Eighty Degree Celsius Laboratory Freezer for ISS (MELFI) and fixed media in Tissue Bags. The Lung Tissue investigation uses the microgravity environment of space to test strategies for growing new lung tissue. Using the latest bioengineering techniques, the Lung Tissue experiment cultures different types of lung cells in controlled conditions onboard the ISS. The cells are grown in a specialized framework that supplies them with critical growth factors so that scientists can observe how gravity affects growth and specialization as cells become new lung tissue. Kubik: On Saturday and Sunday the crew deinstalled Agenzia Spaziale Italiana (ASI) Biomission experiment containers from the Kubik 5 facility in the Columbus module, completing Runs 2 and 3. Later today they will deinstall another experiment container, completing Run 4. Each of the containers is inserted into a Minus Eighty Degree Celsius Laboratory Freezer for ISS (MELFI) in order to preserve the scientific samples. Kubik 5 is supporting Biomission investigations by providing a small controlled-temperature incubator / cooler for the study of biological samples in a microgravity environment. Kubik is equipped with removable inserts designed for self-contained, automatic experiments using seeds, cells, and small animals. ADvanced Space Experiment Processor (ADSEP): On Saturday the crew removed Cell Culturing (CellCult) cassettes from ADSEP, inserted cells into each cassette and then reinserted them into ADSEP. ADSEP is a thermally controlled facility that accommodates up to three cassette-based experiments that can be independently operated. Its companion hardware consists of a collection of several experiment cassettes, each doubly or triply contained, that accommodate experiments in cell technology, model organisms, multiphase fluids, solution chemistry, separation science, microencapsulation, and crystal growth. For CellCult investigations, each cassette contains a single 50 milliliter rotating filtered bioreactor, a reservoir for fresh media, two programmable peristaltic pumps, a waste reservoir, and up to six sample-collection or reagent containers connected by manifold to the reactor. Cultures can be operated in continuous perfusion, batch fed, static, or sampling mode. Both the removal of samples and the addition of additives to the reactor volume can be programmed or teleoperated. Aeration and humidity control are available NanoRacks Module 9: On Saturday the crew activated mixture tubes for the NanoRacks Module 9 second operations session in support of the NanoRacks-National Center for Earth and Space Science-Casper (NanoRacks-NCESSE-Casper) investigation. NCESSE supports various schools and student-designed experiments that address challenges of living and working in space. The program is also a key initiative for U.S. science, technology, engineering and math (STEM) that strives to educate and inspire the next generation of scientists and engineers to work on the space program. Lighting Effects: On Sunday a crewmember provided a sleep log entry for the Lighting Effects investigation. The light bulbs on the ISS are being replaced with a new system designed for improved crew health and wellness. Fluorescent bulbs are being replaced with solid-state light-emitting diodes (LEDs) that have adjustable intensity and color. Investigators will determine if the new lights improve crew circadian rhythms, sleep, and cognitive performance. Results from this investigation also have implications for people on Earth who use electric lights. Cardio Ox: A 50S crewmember collected blood and urine samples today to satisfy their Return minus 15 Day (R-15) Cardio Ox requirements. By collecting Cardio Ox ultrasound and ECG data, along with blood and urine samples, scientists are trying to determine whether biological markers of oxidative and inflammatory stress are elevated during and after space flight and whether this results in an increased, long-term risk of atherosclerosis in astronauts. Fine Motor Skills (FMS): Today a 51S crewmember completed their tenth FMS session. The FMS investigation studies how the fine motor skills are effected by long-term microgravity exposure, different phases of microgravity adaptation, and sensorimotor recovery after returning to Earth gravity. The goal of the investigation is to determine how fine motor performance in microgravity varies over the duration of six-month and year-long space missions; how fine motor performance on orbit compares with that of a closely matched participant on Earth; and how performance varies before and after gravitational transitions, including periods of early flight adaptation and very early/near immediate post-flight periods. Today’s Planned Activities All activities were completed unless otherwise noted. ASI Experiment Container insertion into MELFI Experiment Container deinstallation Combustion Integrated Rack Alignment Guide Removal Cupola Window 4 Scratch Pane Replacement Cupola Window 4 Scratch Pane Removal Cupola Window 6 Scratch Pane Replacement Cupola Window 6 Scratch Pane Removal Cupola Window 3 Scratch Pane Cleaning Exploration script recording Synthetic biology script recording Fine Motor Skills Experiment Test – Subject Handover Feedback Questions HRF Generic Frozen Blood Collection – Operator HRF Generic Frozen Blood Collection 30 Minutes – Subject HRF Generic Frozen Blood Collection Conclude Stow HRF Generic Sample MELFI Insertion Operations HRF Generic Sample MELFI Retrieval Insertion Operations HRF Generic Refrigerated Centrifuge Configuration HRF Generic Refrigerated Centrifuge Spin Conclude HRF Generic Urine Collection Female – Subject HRF Generic Urine Collection Stow Lighting Effects Sleep Log Entry – Subject Mouse Epigenetics Item Gathering Multi-Omics-Mouse Mouse Habitat Cage Unit Maintenance Familiarization Multi-Omics-Mouse Cage Maintenance for Water 1 (MG) and Food Cartridge Exchange for M1. Photo/TV Camcorder Solar Eclipse Deactivation Photo/TV Camcorder Solar Eclipse Setup Photo/TV D4 Solar Eclipse Deactivation Photo/TV D4 camera setups for the solar eclipse Photo/TV Solar Eclipse Rodent Research Water Box and Light Check Surface Tension Containment MWA Assist Surface Tension Containment MWA Operations Surface Tension Containment MWA Preparation XF305 Camcorder Setup Mate a […] from ISS On-Orbit Status Report https://go.nasa.gov/2g1TVVj
0 notes
Text
ISS Daily Summary Report – 8/21/2017
Solar Eclipse Viewing: The crew removed scratch panes from Cupola windows #4 and #6 and cleaned the window #3 scratch pane. The crew then took both HD video and still images of the moon’s umbra on Earth from the Cupola. They also obtained images of both the sun and the moon. In addition, the P1 Lower Outboard External High Definition Camera (EHDC) was used to capture HD video of the moon’s umbra on Earth. Lung Tissue: On Saturday the crew set up hardware in the Microgravity Science Glovebox (MSG) for Lung Tissue operations. They also took samples and inserted them in to a Minus Eighty Degree Celsius Laboratory Freezer for ISS (MELFI) and fixed media in Tissue Bags. The Lung Tissue investigation uses the microgravity environment of space to test strategies for growing new lung tissue. Using the latest bioengineering techniques, the Lung Tissue experiment cultures different types of lung cells in controlled conditions onboard the ISS. The cells are grown in a specialized framework that supplies them with critical growth factors so that scientists can observe how gravity affects growth and specialization as cells become new lung tissue. Kubik: On Saturday and Sunday the crew deinstalled Agenzia Spaziale Italiana (ASI) Biomission experiment containers from the Kubik 5 facility in the Columbus module, completing Runs 2 and 3. Later today they will deinstall another experiment container, completing Run 4. Each of the containers is inserted into a Minus Eighty Degree Celsius Laboratory Freezer for ISS (MELFI) in order to preserve the scientific samples. Kubik 5 is supporting Biomission investigations by providing a small controlled-temperature incubator / cooler for the study of biological samples in a microgravity environment. Kubik is equipped with removable inserts designed for self-contained, automatic experiments using seeds, cells, and small animals. ADvanced Space Experiment Processor (ADSEP): On Saturday the crew removed Cell Culturing (CellCult) cassettes from ADSEP, inserted cells into each cassette and then reinserted them into ADSEP. ADSEP is a thermally controlled facility that accommodates up to three cassette-based experiments that can be independently operated. Its companion hardware consists of a collection of several experiment cassettes, each doubly or triply contained, that accommodate experiments in cell technology, model organisms, multiphase fluids, solution chemistry, separation science, microencapsulation, and crystal growth. For CellCult investigations, each cassette contains a single 50 milliliter rotating filtered bioreactor, a reservoir for fresh media, two programmable peristaltic pumps, a waste reservoir, and up to six sample-collection or reagent containers connected by manifold to the reactor. Cultures can be operated in continuous perfusion, batch fed, static, or sampling mode. Both the removal of samples and the addition of additives to the reactor volume can be programmed or teleoperated. Aeration and humidity control are available NanoRacks Module 9: On Saturday the crew activated mixture tubes for the NanoRacks Module 9 second operations session in support of the NanoRacks-National Center for Earth and Space Science-Casper (NanoRacks-NCESSE-Casper) investigation. NCESSE supports various schools and student-designed experiments that address challenges of living and working in space. The program is also a key initiative for U.S. science, technology, engineering and math (STEM) that strives to educate and inspire the next generation of scientists and engineers to work on the space program. Lighting Effects: On Sunday a crewmember provided a sleep log entry for the Lighting Effects investigation. The light bulbs on the ISS are being replaced with a new system designed for improved crew health and wellness. Fluorescent bulbs are being replaced with solid-state light-emitting diodes (LEDs) that have adjustable intensity and color. Investigators will determine if the new lights improve crew circadian rhythms, sleep, and cognitive performance. Results from this investigation also have implications for people on Earth who use electric lights. Cardio Ox: A 50S crewmember collected blood and urine samples today to satisfy their Return minus 15 Day (R-15) Cardio Ox requirements. By collecting Cardio Ox ultrasound and ECG data, along with blood and urine samples, scientists are trying to determine whether biological markers of oxidative and inflammatory stress are elevated during and after space flight and whether this results in an increased, long-term risk of atherosclerosis in astronauts. Fine Motor Skills (FMS): Today a 51S crewmember completed their tenth FMS session. The FMS investigation studies how the fine motor skills are effected by long-term microgravity exposure, different phases of microgravity adaptation, and sensorimotor recovery after returning to Earth gravity. The goal of the investigation is to determine how fine motor performance in microgravity varies over the duration of six-month and year-long space missions; how fine motor performance on orbit compares with that of a closely matched participant on Earth; and how performance varies before and after gravitational transitions, including periods of early flight adaptation and very early/near immediate post-flight periods. Today’s Planned Activities All activities were completed unless otherwise noted. ASI Experiment Container insertion into MELFI Experiment Container deinstallation Combustion Integrated Rack Alignment Guide Removal Cupola Window 4 Scratch Pane Replacement Cupola Window 4 Scratch Pane Removal Cupola Window 6 Scratch Pane Replacement Cupola Window 6 Scratch Pane Removal Cupola Window 3 Scratch Pane Cleaning Exploration script recording Synthetic biology script recording Fine Motor Skills Experiment Test – Subject Handover Feedback Questions HRF Generic Frozen Blood Collection – Operator HRF Generic Frozen Blood Collection 30 Minutes – Subject HRF Generic Frozen Blood Collection Conclude Stow HRF Generic Sample MELFI Insertion Operations HRF Generic Sample MELFI Retrieval Insertion Operations HRF Generic Refrigerated Centrifuge Configuration HRF Generic Refrigerated Centrifuge Spin Conclude HRF Generic Urine Collection Female – Subject HRF Generic Urine Collection Stow Lighting Effects Sleep Log Entry – Subject Mouse Epigenetics Item Gathering Multi-Omics-Mouse Mouse Habitat Cage Unit Maintenance Familiarization Multi-Omics-Mouse Cage Maintenance for Water 1 (MG) and Food Cartridge Exchange for M1. Photo/TV Camcorder Solar Eclipse Deactivation Photo/TV Camcorder Solar Eclipse Setup Photo/TV D4 Solar Eclipse Deactivation Photo/TV D4 camera setups for the solar eclipse Photo/TV Solar Eclipse Rodent Research Water Box and Light Check Surface Tension Containment MWA Assist Surface Tension Containment MWA Operations Surface Tension Containment MWA Preparation XF305 Camcorder Setup Mate a […] from NASA http://ift.tt/2vldGco via IFTTT
0 notes