
endashemdash
– —
The tumblog of Nour Malaeb, designer.
1849 posts
Don't wanna be here? Send us removal request.
Last Seen Blogs

tellmewhathurts
Tell Me What Hurts

petuniapolar
The Sacred Shapeshifter

porridgeart
Fund your local sleepy artist (me)

scribblemedee
Miscellaneous Dee

mercenarylads
Medic Mains, Rise UP
Link
3 notes
·
View notes
Quote
It’s good for the thing you make, in and of itself, to make you proud – it’s good for you to make it absolutely as good as it can possibly be and to make it special and to make it reflect what your values are. That’s your number-one job, because … that’s your number-one job. But there’s another whole part that’s the engine: When things work, when people pay attention and you’re in a position to help somebody else get their movie produced or their show made or you’re just in a position to give advice to somebody who says How do I do what you do?, that’s that engine. It’s not a matter of showing off how much pull you have, but the thing is an engine no matter what; you can choose to do nothing with it or something with it, but if you do nothing with it, that’s a choice, right? Or if you only do for yourself? That’s certainly a choice.
Everything You Make Is An Engine — Linda Holmes
0 notes
Text
Long-overdue thesis update
I haven't posted here in a while, but much has happened since I walked into BCID in early February. I've built two iterations of a prototype, tightened up my story, worked in feedback from disabled people I've met, and started meeting with an amazing thesis advisor.
Let's start with my thesis advisor. Her name is Chancey, and she works at the Andrew Heiskell Braille and Talking Book Library, where one of her recent projects is Dimensions: Community Tools for Creating Tactile Graphics & Objects. She’s been really great at helping me think through how people might live and interact with furniture robots, giving me examples of existing interfaces that are designed for disabled people that I might learn from and incorporate into my project, and planning out next steps together. We missed our meeting this week since she was at the annual CSUN assistive technology conference in San Diego, and I’m looking forward to our upcoming meeting to hear what she learned out there.
Presenting at BCID
On February 22nd, I presented my thesis project to a support group that meets weekly at the Brooklyn Center for Independence of the Disabled. I was really nervous: I had no idea how the project would be received, how much explanation of the tech I would have to do, and whether the idea of a robot that will likely be quite expensive compared to typical furniture would have any appeal.
I needn’t have worried. When I showed the audience the animations from this post, they started responding with questions and ideas before I had the chance to describe the animation to the visually-impaired members of the support group. Unfortunately I was so caught up in answering questions and digging deeper into the ideas that were coming at me that I neglected the non-sighted members of the audience, and for that I’m truly regretful.
In general, the feedback I got was related to how the furniture could better serve people who use powered wheelchairs, things to consider for the furniture to be eligible for Medicare/Medicaid, and concerns about durability and performance. In more detail:
Height-adjustability was a big hit. People set up their power chairs differently depending on their height and what feels comfortable to them, and as a result often find themselves unable to sit under a table. It made me think about how it is common for an office chair to be height-adjustable, but not for desks and tables. This makes sense when you’re thinking about accommodating people of different heights and body shapes, but if surfaces were also adjustable then you would accommodate even more people.
“We knock things over all the time, so this thing has to be waterproof.” Durability was a big concern. Waterproofing to protect from accidental spills was a top priority. The ability to withstand bumps without rolling away or falling over is important too. A subthread of this conversation was the idea of having a lip around the top surface of the furniture to prevent things from rolling off.
Stability is crucial if the furniture is going to support the weight of someone leaning on it and using the grab handles to stand up from a seated position or transfer from a wheelchair to a bed or a couch. There was concern that because the robots are wheeled, they would roll away under weight. This was a good insight, and a future version of my prototype should have a smart way of locking the wheels or lifting the wheels off the ground when someone puts a lot of weight on it. This also brought about discussion about how powerful the motors would be, and whether they would be able to generate enough lift.
One lady was very into the idea of using the furniture as a “smart walker,” and this launched a discussion about how fast the furniture should roll, and how one might control its speed and direction manually. She wanted variable speed, “for good days and bad days.”
Everyone wanted lots of storage on the furniture. The idea that they could have things they need frequently—whether it is their phone, remote controls, meds, reading materials, or anything really—on a rolling cart that could come to them wherever they were in their homes was a very popular one.
People wanted more features: a way to open doors, a built-in light for people with low-vision, simple and hassle-free charging (with a meter to indicate how much charge is left), help putting on shoes... all ideas that lead to different opportunities to explore.
One person shared an idea that she had been talking about with her coworker for a while: a “picker-upper” that could help someone who has fallen out of a wheelchair or off of their couch to get up without assistance. She really wanted this device, since the only option in most cases is to call emergency services, who would then proceed to knock down her door in order to enter her apartment and help her. She lives alone, and worries that if this were ever to happen, her landlord would have enough reason to evict her, meaning she would end up in an assisted living facility (a “home”)—something she really doesn’t want to happen.
Finally, it was great to hear people say they liked the style of the furniture and that they wanted it to be “colourful” and “pretty.” I heard: “Everything that is designed for us is medical and ugly.”
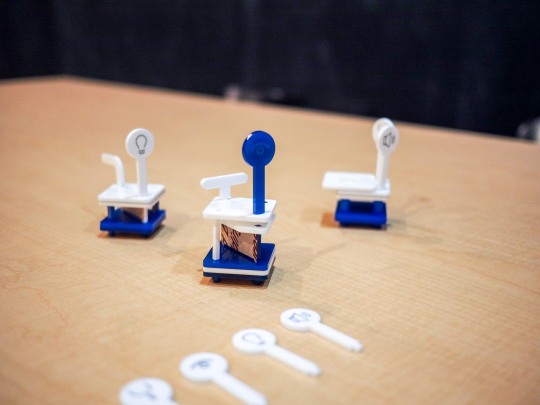
Prototype 1
After I got my feet wet with prototyping robotics with ROS (the Robot Operating System), I ordered more parts and built a bigger, sturdier version of the robot base out of plywood. My goal was to be able to put existing pieces of furniture on it and see how people react to furniture gaining autonomy.



Making robots is hard, and I’m grateful for open-source projects like ROS and Linorobot that make getting started much easier.
Prototype 2
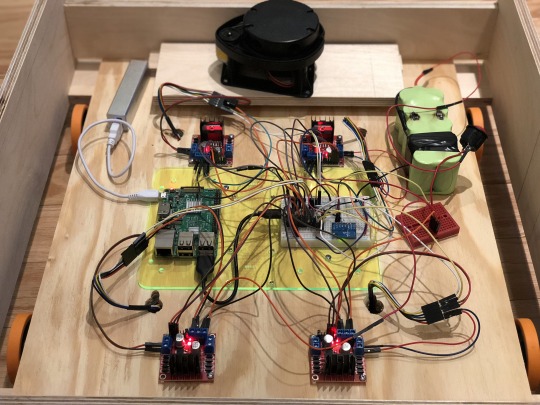
I’m currently in the process of building the next prototype iteration. This time, I’m making the whole thing: autonomous base, cart-like top, and height-adjusting motors. I started off by ordering the parts I need, and modeling the furniture around them in CAD. I designed it so that it could be cut out of a single sheet of half-inch plywood on the CNC machine at our prototyping lab, the Visible Futures Lab.



I’m in the process of programming the height adjustment and the voice interface for it. I’m hoping to test it with users in the upcoming week.
0 notes
Photo

Gloomy Sunday
Latest addition to Memo Akten’s ongoing ‘Learning to See’ project demonstrates a neural network powered realtime image translation framework, presenting possibilites for visual poetry:
vimeo
A pre-trained deep neural network making predictions on live camera input, trying to make sense of what it sees, in context of what it’s seen before. It can see only what it already knows, just like us.
More Here
7K notes
·
View notes
Text
Visiting the Brooklyn Center for Independence of the Disabled
I was walking home from the subway and just looking at storefronts, and saw this piece of paper in a glass door:

I popped in today, and the staff there was super nice, though a bit annoyed at first (I should have called ahead!). I mainly spoke to Sandrina, the Program Manager at BCID.
I explained that I was a student doing a master’s thesis on assistive technology in the home, and she told me what BCID offers in terms of training, independent living skills classes, a venue for support groups, among other services (and they’ve been around since the 1950s!). Then I described to her my robot furniture idea and showed her an animated rendering of one example, and was happy (and surprised) to see her eyes light up. She seemed to get the idea pretty instantly, and called over her colleague Veronica to take a look as well. Veronica, who was using a powered wheelchair, also got the concept right away, and immediately thought of two of BCID’s clients that she wanted to show it to.
It was validating to see that folks who work with people with disabilities every day were able to see value in the concept without much explanation on my part. This was much different than the reaction I normally get, which is usually “I don’t get it.”
Of course, a few questions came up:
Why are you here? Sandrina wanted to know what I wanted from the moment I walked in the door. It seems that a lot of students visit BCID, many wanted internships on short notice.
What is your dream outcome? Sandrina asked this, very matter-of-factly. It caught me a little off-guard, because I don’t really think I’ve visualized what my dream outcome would be. I was there to learn about the population I want to serve, and Sabrina was asking me about my own desires.
How do you expect people to control this thing? I was happy to hear this question, because it’s one I don’t have the answer to but want to try and prototype ideas for soon. We talked about joysticks (her idea), voice interfaces (my idea), and gestures.
On the other hand, there were questions I was expecting that weren’t asked:
Who is this for? I thought that I would be grilled on my intended audience, but that never came up. This is in direct contrast with most designers I’ve shown this to, who always want to anchor things in a target user group.
How much would it cost? I think this is something I’ve been worrying about: would this solution make economic sense for the end user? Or would it cost less to get an assistance dog or do a simple home remodel? Perhaps this question will come up later on in the process.
Why are you making this? I was worried that I would be asked about my motivations. I shouldn’t have worried so much.
I’m super grateful for the time Sandrina and Veronica spent with me today at the Center, and I really wish I had found them much sooner in my process. I’m excited to continue to develop this relationship. Sandrina invited me to present my idea to one of their support groups next Thursday, February 22nd. I’m hoping to have a mostly-working works-like prototype by then, to get some reactions from the audience. If I’m lucky, I’ll get some one-on-one time with people after my presentation as well.
3 notes
·
View notes
Quote
Ask the questions that have no answers.
Invest in the millennium. Plant sequoias.
Say that your main crop is the forest
that you did not plant,
that you will not live to harvest.
Say that the leaves are harvested
when they have rotted into the mold.
Call that profit. Prophesy such returns.
— Wendell Berry encouraging some long term thinking.
1 note
·
View note
Text
Planning for a proof-of-concept
Our next prototype for thesis is a critical one. Our instructor Eric writes that it "must be realistic enough and the overall presentation complete enough that users can evaluate the viability of your idea."
My plan is to build a larger scale version of my last prototype, that is powerful enough to place smaller items of furniture on to quickly test the idea of roaming semi-autonomous furniture robots.
Features
Must-have:
Obstacle-avoidance
Configurable interface
Voice
Physical controls
Gestures
Eye tracking
Myo armband or myoelectric sensors
Powerful motors (ability to hold furniture)
Powerful battery
Nice-to-have
Autonomy / SLAM
Wireless charging
Looks nice
Fidelity
Functional: high-fidelity
I want it to be a real robot with a real UI that I can test
Aesthetic: mid to low
I just need it to work, but it would be nice if it were made of wood and looked semi-finished
UI: mid
I need it to be finished enough to start testing, and flexible enough to try out with different interfaces
Testing goals
Test different UI types (priority 1)
Test people's response to autonomous furniture (priority 2)
Test usefulness (priority 0?)
Test possible functionality — this is the fun part
Personal goals
Build something I'm proud of
Make a semi-autonomous robot, at least with obstacle avoidance
Feedback
I shared this with my thesis buddy Alex (who is a great thesis buddy!) and he had a few questions:
What is the thing going to do? I've been prototyping the interface and the robotic components of the furniture, but I'm still unclear on what functionality the furniture will have. How will it make people's lives easier?
Do you really need to go this far with your prototype? What would you learn with the prototype that you want to build? Building off of the first question, Alex is wondering if I could learn what I need to in a much simpler way. He's suggestion I could just use a remote control car as a proxy for a robot.
Will it have advanced your thesis? Well, isn't this the ultimate question. I have a feeling that anything I build will advance my thesis in some way, and I tend to want to make something that is closest to final sooner rather than later, so I think this proof-of-concept prototype will help me understand whether A) I'm onto something, B), I'm on the right path but need to simplify, or C) I need to completely change direction.
2 notes
·
View notes
Text
Draft Value Propositions
Writing value propositions is hard, especially writing variations on them. I started with these two (ignore the names I'm trying for the project, they're just placeholders):
1
FOR people with mobility impairments WHO want to live more independently at home, POLTERGEIST is a suite of modular furniture robots THAT assist with mobility around the home. UNLIKE other robot assistants, POLTERGEIST doesn’t feel like another presence in your home, letting you feel like you are in control.
2
FOR people with disabilities WHO want an alternative to disability remodeling, TILQA is a series of customizable furniture robots THAT adapt homes to their owners’ needs. UNLIKE Ori, TILQA focuses on adaptation rather than space-saving.
I got feedback from Katarina and Wei Ting:
What does a "suite" or "series" mean? It sounds like robot furniture will take over your home, which is scary.
What does "doesn't feel like another presence in your home" mean?
How do the furniture bots make you feel like you're in control?
Based on that feedback, here's an updated draft of the value prop:
3
People with mobility impairments want to live more independently at home. Activate provides modular furniture robots that assist with mobility in indoor spaces. Unlike other robot assistants, Activate’s offerings are unintrusive, familiar, and fit naturally into people’s homes and lifestyles.
Feedback? Let me know!
0 notes
Text
How do you tell your furniture what to do?
Imagine your furniture was smart. Let's say your side table could come around from beside the couch and stop in front of you, so that you can put your empty coffee mug on it and banish it to the kitchen. How would you communicate to the side table that that's what you wanted to do?
For a quick two-week prototype, I decided to build the basis of a robot platform so that I could start testing out different interfaces. The UI here is not necessarily an app. People could communicate with their robot furniture in a number of ways:
Physical controls, like a joystick, game controller, or keyboard
Software controls, like an app on a phone or tablet
Voice commands, perhaps even through a product like Amazon's Echo line or Google Home
Something less obvious, like eye-tracking, morse code, whistling…
I put together my robot from a combination of kit parts, laser-cut pieces of acrylics, and components pruchased form various sources.
The software running on the robot is ROS, an open-source Robot Operating System that is quickly becoming the standard for robotics project, by way of the Linorobot project. It took a lot of wrangling to get all the software running just right on the raspberry pi, but I finally was able to get a functional prototype built.
Next steps:
Make the robot autonomous
Attach the interfaces from the list above and test them out
Build a bigger robot that I can place furniture on to approximate the final product
Things to address:
Is this going to be creepy?
Are large autonomous moving object scary?
Will furniture be able to get around in most homes, or will there be too many things in the way/too many narrow spaces to pass through?
1 note
·
View note

Text
Hiding robots in furniture
After exploring what it would take to design and build a partial exoskeleton for a person with muscular dystrophy, I’ve had a shift in focus. Previously I was approaching assistive technology with what Sara Hendren would call “linearity”: I saw a human body that I thought needed adjusting, and tried to design for that. I now realise that I would be better off working on an adaptive system that would embed assistance the people’s environments, rather than force them to wear assistive technology on their bodies.
[screenshot from the adaptation + ability group’s manifesto]
I want to go about that by giving furniture new functionality and abilities. I’m talking about creating a robotic furniture system. What does that mean?
Robotic would mean that the furniture can sense its environment, and act based on what it senses. It can listen for and respond to user input. It can know where it is in the context of the home or the room and in relation to the user.
I want it to be a system because I want people to be able to configure their furniture to suit their own purposes. I don’t want to presume to know what kinds of assistance people might need from their furniture. But if the furniture were designed as a system of components that people could assemble themselves (or with help), then that opens up possibilities that I could never think of.

I also want to emphasise that these objects should be furniture first and foremost. That’s what I hope will differentiate them from the nursing home robots that are starting to be put into use in Japan, or “social robots” like Kuri and Jibo that seem like they are meant to be a cuter Alexa. Those robots have their place. But sometimes you want the robot to just blend in with the background.

My next step is to find out what people would want from their robot furniture. In the gifs above I’ve imagined a simple cart that could carry things around the house for you, and potentially help lift you up from a chair or couch.
To get at what people will need, I want to workshop the idea with people with different disabilities. I’m preparing materials for this workshop. I tried two approaches. In the first, I laser cut pieces of acrylic into components that could be assembled in different ways.
These proved to be fun to play with, but the pieces didn’t all fit together well and they broke easily. So I decided that rather than roll my own legos, I should just use the real thing.
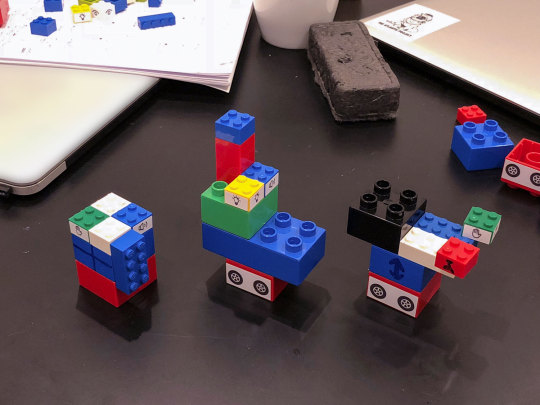
Legos should work well, since I want the conversation to be about functionality and not aesthetic. My two considerations right now are how to show scale (or whether that is necessary), and how to print out stickers with braille on them in case I’m able to workshop with blind or visually-impaired people. But I should probably cross those bridges when I get to them.
1 note
·
View note
Text
Prototyping for the human body
I’ve been prototyping. I didn’t really know where to start, since I haven’t been able to get face time with end users, and haven’t been inspired particularly (red flag?). So I started with the one person who really kicked off this entire thesis. I texted a very close friend of mine with limb-girdle muscular dystrophy (LGMD) to get his thoughts on exoskeletons.
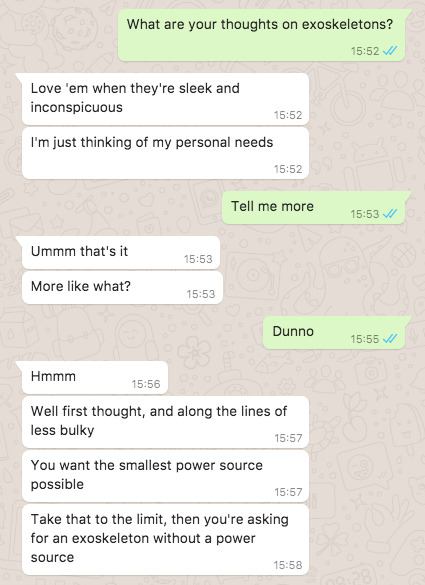
Unprompted, he suggested that there could be a relatively simple product, a small piece of equipment, that would help him with his daily mobility. Specifically, it would help him with elbow flexion. His LGMD means that even empty-handed, raising his hands up is difficult. Picking things up is pretty much always a two-handed process.
The partial exoskeleton he was thinking about would be a device that captured the energy of his elbow extending (his hand and forearm lowering down with gravity, and his elbow opening up) and then used that energy to assist him in raising his hand and forearm back up. We talked about other requirements:
lightweight
comfortable enough to be worn all day
sleek enough to fit under clothes
without cumbersome electronics or wires or batteries.
I got to work sketching out ideas around how this could work. The core concept of this wearable was that it could capture enough energy from a forearm being lowered to then provide meaningful assistance in lifting the forearm, all without hindering movement. Even in the sketch stage, it was clear that this would be a challenge, but before I got much further I wanted to quickly test that the idea even made sense.
I went into the shop to put something together to prove out the core mechanics of it. Using shop scraps and some leftover elastic material from our Future Wearables class, I was able to rig a simple two-part brace out of felt, held together with the elastic, and given some structure with cardboard. I really didn’t think it would work, but I tried it on and found that I could feel the elastic pulling my forearm up to a closed position, but not enough to keep me from relaxing my arm by my side.
I tested it out with Alex, who confirmed that I wasn’t just imagining things.

For prototype two, I wanted to create a structure within which to explore different material properties to find something that would perform well enough and meet the other requirements. I decided to make two 3D printed parts that could accommodate different configurations and materials. I rushed a bit to meet a class deadline, and while the prototype functioned, it didn’t lead me to discover any new mechanical properties.

I did learn a few things from trying it on and showing it to classmates. It was very uncomfortable. I had decided that mounting the upper portion to the front of the arm, over the bicep, would be ideal in terms of attachment points for the elastic straps. However, this led the hard plastic part to dig into the crook of the elbow, which was very uncomfortable. The shape did not help: in my attempt to make it “universal” I had failed to consider the shape of the human body.
At this time, I also felt that the assist provided could be improved with a complete change of mechanism. I searched for small gas springs, and found that you can easily acquire ones on Amazon that are meant for cabinet doors. I ordered some, and designed a new brace around a mechanism that uses compression of the spring to store the energy.
I learned a lot of new tricks in Fusion 360, the 3D modeling software I’ve been using of late (it’s free for students!), which were really helpful in figuring out the mechanism without actually building anything. Once it seemed like it was going to do what I wanted it to do, I printed the parts in the VFL, our school’s prototyping lab.
24 hours later, I had the finished parts and the screws I needed to put it all together. I assembled the brace and tested out the gas spring mechanism. It worked! Excited, I made a simple strap to attach it to my upper arm, and tried it on.

Immediately, I could tell that it was not going to work. The attachment was not secure. The strap was too low on my arm. The whole thing was heavy, since the gas spring is made from metal, and the plastic parts were bulked up because I didn’t want them to break. I designed the brace thinking I only needed an attachment point on the upper arm, and as long as it was tight enough, I could let the lower portion “float” under the forearm, allowing greater freedom of movement.
What ended up happening was that the whole thing swung around with its own weight, never sitting in just the right spot for the forearm to engage the lower plate and push against the mechanism. And even if it did, the flimsy strap and low attachment point meant that it was quick to swing around again, rather than compress the gas spring.
The gas spring itself unfortunately proved to be too stiff for practical use. It provided a lot of lift, but in this case it was too much lift, meaning that the wearer could not easily and comfortable relax their arms at their sides.
My original hope was to be able to send the prototype to my friend in Lebanon to have him try it on in daily use. Instead, I’ve decided to go back to the drawing board and rethink my strategy.
These prototypes taught me a lot about designing and making devices that are worn on a part of the body we move a lot:
Elbows are weird and complex! They’re not just simple hinges. The human body is amazing.
I abandoned a prototype progression too soon. I didn’t explore the different materials and configurations I was considering initially, and jumped to conclusions without proper testing.
Things have to be small to be comfortable. Arms seem like they would be long enough for bigger devices, but you run out of real estate pretty quickly.
It is really hard to attach things to the human body. Besides for clothes, we’ve got watches, spectacles, and jewelry down, but really we haven’t figured out other parts of the body, as a species. I should probably try to find some historical examples of things that go on the arm.
I’ve got a few possible ways forward:
I’ve been playing around with the idea of using sprung steel to achieve the lift assistance. I’m hoping that even a relatively thin length of spring steel wire would be strong enough to do what I want it to do without being too heavy to be comfortable. It would also make the brace very compact, able to be worn under a shirt or jacket.
I’m also reconsidering whether to use electronics in the brace or not. On the one hand, they add a lot of complexity and require heavy batteries, but on the other hand could add more nuanced functionality.
And finally, I need to think about the feedback I got from the class. Would a product like this be useful to others, beyond just my friend? Maybe even people without MD? Does it solve more problems than it introduces? Where can it go beyond just a single brace design? Could it be applied to other parts of the body? Could it be adjustable to different abilities and body types? Could it be part of a system of assistive wearables? Could I teach people how to build their own?
I don’t know yet.
1 note
·
View note
Photo
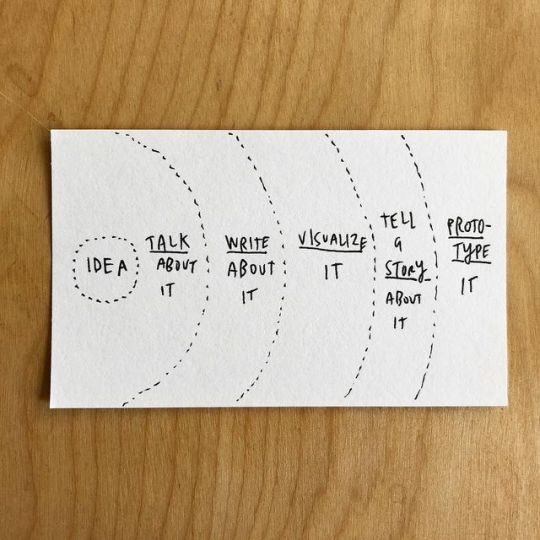
How to make ideas less abstract (diagram has possible commercial value) — view on Instagram http://ift.tt/2zxiPlq
24 notes
·
View notes
Video
vimeo
Eyeo 2015 – Sara Hendren
This video is so amazing. Sara and her work are incredibly inspiring. I watched this over the summer and then forgot about it, but the ideas from it have stuck with me. I'm glad I watched it again.
Some of those ideas are:
"Human ability and variability is so much more interesting than these stories [of amazing prosthetic technologies] would have you believe." Sara comments on the opposing logics of "therapy and cure" — the engineering or design approach of trying to "fix" everything — and of accommodating differences. "Is [human difference] a disorder that is meant to be cured like this? Or are we meant to engineer systems, architectures, even economies that accommodate differences and variability?"
How something like the Jaipur foot has had so much more impact than the high-tech, myoelectric, fully articulated prosthetic arms and hands being worked on in universities.
"[Prosthetics] do something around identity, around emotion, and they even are the way that cultures collectively make meaning of bodies and ideals." This was in reference to the way that prosthetics function to make those around the wearer feel more comfortable, often at the expense of the comfort and desires of the wearer themselves. This makes prosthetics political.
"Pause and ask: who's asking us for a fix, and who really is not?"
"To build the right things, you actually need a lot of people in the room." A humbling reminder that my thesis might be my own, but I won't achieve anything meaningful working in isolation.
0 notes
Conversation
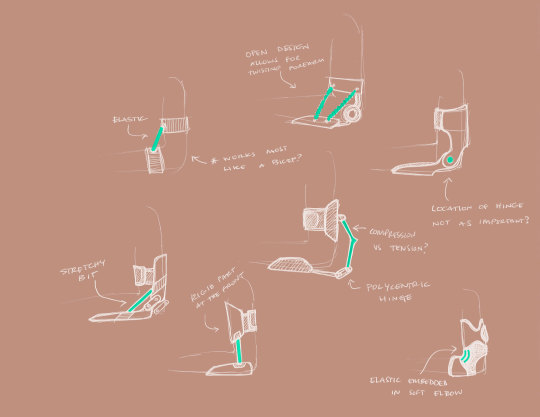
Conversation with T
N: What are your thoughts on exoskeletons?
T: Love 'em when they're sleek and inconspicuous
T: I'm just thinking of my personal needs
N: Tell me more
T: Ummm that's it
T: More like what?
N: Dunno
T: Hmmm
T: Well first thought, and along the lines of less bulky
T: You want the smallest power source possible
T: Take that to the limit, then you're asking for an exoskeleton without a power source
N: would you consider it a vehicle? Something you use when you go out and about? Or more like clothing? Or something more permanent?
T: For a typical exoskeleton purpose that won't do of course
N: There are some unpowered ones that use gravity somehow
T: But for someone that has some motion ability in some degrees, maybe use that to store the energy, mechanically I'd imagine, and reuse it in another degree of motion
T: For example
T: It's easy for me open my arm outwards at the elbow
T: But not so much to close it in
N: I see
N: So something elastic storing the opening energy to help you to close it
T: So the exoskeleton would work, whenever I open my arm, some spring type mechanism or whatever is engaged, and that energy can help with closing my arm
T: Yes
T: Elastic
T: Clothing
T: Less steam punk than this sounds, more cyberpunk like blade runner. Sans electronics. It has to be organic.
T: And free range
T: :p
T: Yalla work on it, and I expect to see results by the end of the week
T: Good results, so we can show them to your father
N: Hahaha
N: But seriously
N: I could try and prototype something
T: So he stops accusing us of sitting in our asses and not being productive
T: Really??
N: Yep
T: Wow
T: That would be hella cool
N: Tab
T: I take it, I helped then?
N: Wanna write up some specs?
N: Yes you did!!
T: This is your fyp/thesis?
N: Let’s make some exoskeletons
N: Yeah, I’m exploring human augmentation
T: Designing exoskeleton
N: Going full deus
T: Oooouuuuuu
T: That hit the spot for me
T: 3am tel3able 3al Qatar
T: Watar
T: I'll write you some specs
T: And I will show you the stoodjez
N: Hahaha
N: Awesome
T: Right now?
T: Jk
N: Any ideas for leg exos?
N: Yes right now
T: Zahhit
T: Leg exos would be along the same lines
N: But storing energy through compression?
T: But considering the future, they'll have to be more complex, on that they'll have to have some element of rigidity to them to keep me/whomever standing
T: Yea
N: What about aesthetics? Invisible? Cyberpunk? Vw?
T: Vw?!
N: Hahaha
T: Least visible is best
T: But we know it's still gonna be somewhat visible
T: So might as well be cyberpunky
T: Unless it's so minimal it can be worn under clothes
T: Actually it should be like that
N: Cool
N: Good idea
N: Do you think you’d only take them off to sleep? To shower? At home?
T: I'd say to sleep
T: Shower optional
N: dope
N: let me know if you have any other ideas
3 notes
·
View notes
Photo

Experimental video “Tamas”: https://vimeo.com/238396868
25 notes
·
View notes