#3d printed drone
Text
Tech Specs for Nano Drones on intoFPV
Its about the Black Hornet v3 and the Black Hornet Nano helicopter drones.
The Hornet Nano (pd-100?):
100mm long x 25mm
rotorspan = 100mm
topspeed = 35km/h
+video and tilt
+gps
range = 1000m
flight time = 30minutes
weight=15grams incl battery and camera
“the smaller the engines are, the less efficient they get”
And what battery would be required…so far it consumes 465mA/5v = 2.33Wh.
Its flight time is at least 25 minutes and within that time 0.97 Watts will have been consumed.
A 300mAh lipo at 80% discharge contains 1.73Wh, so more then half of the available energy will have already been reserved.
Can one motor even spin 20 minutes without load on the remaining 0.76Wh?
Seems very unlikely, but a 50C 300mAh lipo weights 16 grams, bringing the total of this incomplete list to 33.9 grams, which is already over the limit.
It would seem that they would use even smaller accus, but are there even any motors on the market that small with that much efficiency?
It feels like this whole product is fake… I know it isn’t, but the gap is pretty unbelievable.(I would not expect it to fly over 5 minutes yet it achieves five times as much flight time)
The smallest and most efficient engines that I could find btw where there
6000KV 4.216 g/W at 50% throttle at 3s I could find no smaller engines that performed close to this.
0 notes
Text
Last year, I had the idea to make a Santa Sleigh I could fly beneath my drone. This ended up not happening as my computer was away for repairs. This year, I don't have that problem.

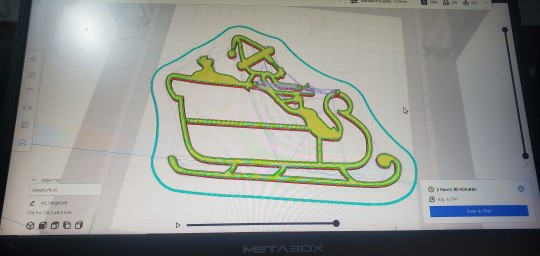
Here's the cad model, drawn up based on some clip art I found.
Everything needs to be outlines to minimise air resistance, and keep it as light as possible.
As you can see, this Santa is being made with an Australian twist.
Here's the Santa in print:

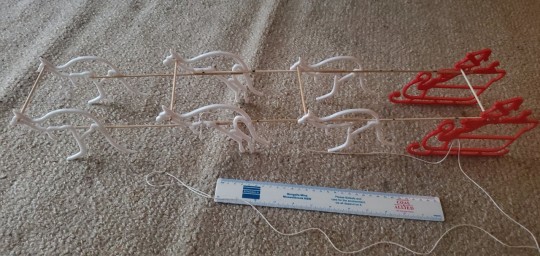
And the first "Boomer" (Kangaroo)

Several hours of printing later, and it was time to stick it together. Wanting strength, I used skewers, even though they were a little thicker than I originally planed for.

I'm balancing the roos on the back, to make sure

It must be wide enough to not confuse the drone's downward sensor.
The morning of Christmas Eve, I awoke to this weather forecast.

I proceeded with final assembly anyway. There were gaps in the clouds, it was only bucketing down some of the time.
The strings need to be equidistant from the balance point, and all the same length.
Launch has to be done very carefully. Going to have to fly very smoothly to prevent twisting.

It flies!

I took it down to the park.


Here is the view from the air:


Maybe if the weather holds, there'll be people in the park to see it.
Merry Christmas!
#Christmas#Aussie Christmas#Drones#drone#3d printing#3d printing adventures#mavic mini#santa sleigh#It is about at the limit of what the drone can carry. Even with this weight if i go to long the Drone will start to complain.#it handles tolerably but doesn't sit exactly right. It veers a little and the sleigh easily turns too much. Needs a steady hand#but the drone did cope with a little wind and the small amount of shaking. though the sleigh is about 2/5 of the drone's mass#Idk if anyone younger knows the song about the 6 white boomers. It feel out of favour when the songwriter fell into disgrace
50 notes
·
View notes
Text
**printing Uzi's Railgun**

gonna 3d print Uzi's Sick as Hell Railgun™️ soon cuz I just finished tweaking the model so it fits
this is print #2, the last one failed wish me luck lol
#murder drones#murder drones uzi doorman#murder drones uzi#cosplay#cosplay props#3d model#3d printing
10 notes
·
View notes
Text

Necklace thingy, printed in Avtek printer, PLA filament. Project is mine.
18 notes
·
View notes
Text
i am so totally normal about murder drones and I'm totally not trying to find chances to start saying "bite me" when the chance arises.
#On a different note I made a 3D model of N's little pilot badge to 3D print at some point#It was my first time ever 3D modeling anything ever#I used a website called tinkercad and it turned out pretty good#Maybe I'll post pictures once I do that#Murder Drones#md#so normal#Totally#Mhm#Yep
10 notes
·
View notes
Text
“I hate this stupid fucking game” I say while actively enjoying the game play
#I Need the stupid fucking drone for this stupid fucking mission so now I have to quit the damn mission to 3d print the stupid fucking drone#I’m only agitated cause I’m nearing the part where horatio dies#watch dogs 2#marcus holloway#reginald blechman#josh sauchak#wrench watch dogs
18 notes
·
View notes
Text
01010110 01100101 01101111 01101111 01101101 00100000 01010110 01110010 01101111 01101111 01101101
By:
instagram
#robotics#drone#drones#3d printing#robot#gadgets#aerospace#toycore#aerospace engineering#3dprinted#Instagram
6 notes
·
View notes
Text


More Figgy printing and this time there the right sizes, and drone bots.
3 notes
·
View notes
Text
youtube
DIY underwater drone explores sunken uranium mine.
0 notes
Text




KK2 tricopter complete, also crashed on maiden flight, broke the servo, the frame remained rock solid, my fault for using a plastic geared servo.
Replaced it with an MG servo, flies great.
#rc#tricopter#fpv#drone#3dprinting#3dprint#mini tricopter#3d printed#flying#flight#crash#tricopter crash#servo
0 notes
Text
From NASA to MIT to Formlabs
New Post has been published on https://thedigitalinsider.com/from-nasa-to-mit-to-formlabs/
From NASA to MIT to Formlabs

MIT senior Audrey Chen lives by the philosophy that “a lot of opportunities only present themselves if you ask for them.” This approach has served her well, from becoming a NASA intern at 15 to running MIT’s autonomous boat team Arcturus to entering a leadership position at 3D printing technology company Formlabs right out of undergrad.
Growing up in Los Angeles, Chen showed a strong aptitude and passion for engineering at a young age and skipped several grades in math. In her first year of high school, she saw a posting about the Lab Space Academy at NASA’s Jet Propulsion Lab. Though the program was for juniors and seniors, she inquired if they would make an exception for her and they agreed. By her junior year she was helping run the program as deputy.
But Chen didn’t stop there: She had dreams of interning at NASA. She asked her mentor and became a drone air traffic control researcher at NASA at 15. “I was not old enough to drive,” Chen says. “High school would end, the bell would ring, and I would put on my backpack and I would run down the street to JPL. Can you imagine you’re the security guard at the gate of the Jet Propulsion Laboratory and a kid shows up for work?”
Chen worked on the Orbiting Arid Subsurfaces and Ice Sheet Sounder (OASIS) project, whose goal is to find and examine freshwater aquifers and ice sheets. “It was very early in the mission, so I was doing system and objective definition,” Chen says.
Next stop: MIT
After graduating high school, Chen ventured across the country to explore her eclectic interests at MIT. When she wasn’t fulfilling the requirements for her mechanical engineering degree, she could be found leather crafting, glass blowing, or table welding in one of MIT’s makerspaces, documenting MIT student life with her camera (garnering the acclimation “The Eyes of MIT” by MIT Admissions), working as a researcher sampling deep-sea sediment, or notably, running the award-winning autonomous boat team Arcturus.
“Arcturus has been the highlight of my MIT career,” Chen says. She founded the team at MIT Sea Grant in 2022 along with a group of equally impassioned students who elected Chen as captain.
“I didn’t have any background in marine autonomy, so we pushed very hard to institute trainings and have lots of workshops so that they would feel comfortable coming in and contributing as soon as possible,” she recalls. Seeking additional funding and support, the team found a home at the MIT Edgerton Center.
Launching Arcturus
“Whenever I think about how Arcturus started and how it somehow still continues, I think it’s a miracle,” Chen says. “Our very first year, there were five of us at the Roboboat competition, and if any individual one of us had not decided to join the team, we either would not have a boat, we would not have electronics, we would not have code to run the boat, or we wouldn’t have funding to run the team.”
Chen’s first year as captain was a tremendous amount of work because the team was so small. In addition to managing the team and assuring they met their goals on time, Chen also acted as the team’s business lead, treasurer, media lead, and photographer. “I was juggling a lot of things. Since then, those roles have further split amongst more people within the team,” she says.
Recruiting isn’t easy for an autonomous boat team, as many students don’t get marine robotics experience in high school. To keep their recruitment pool wide, Chen didn’t expect students to have background in autonomy or in marine systems. “Creating an environment that’s welcoming and friendly and supportive of people’s learning is crucial, because otherwise you won’t have a team. We’ve really pushed hard to recruit from a large body of people. We make sure to emphasize that we’re open to all majors, all years. As an industry, marine robotics, like most engineering, is very male-dominated. We work hard to recruit people of all genders and ethnicities.”
With Chen’s skillful recruiting, Arcturus increased from five to 74 members in 2024. Arcturus flourished under Chen’s leadership, winning First Place Design Overall at the Roboboat competition in 2023.
The challenges with autonomous boats
Chen was drawn to autonomous boats because the field is so full of potential. “You leave a robot on land and you turn it off, it doesn’t move by itself, versus you put it in a body of water and you don’t do anything, then it still moves because of the currents. It needs to be constantly taking in that input and trying to localize where it is,” Chen says.
Chen sees a lot of potential in the marine biotics industry to gather crucial data about our environment. “Autonomy in the marine space is not as well researched as land autonomy is. There’s immense potential for marine autonomy to benefit the world. You think about mapping ocean topology or looking for endangered species or habitat protection or surveying bleached coral reefs. As a vehicle, you have more flexibility to move around versus a buoy. That gives you the ability to take water and sediment samples across a wider spread of area. And by making it autonomous, you eliminate high labor costs, so the price per sample for a researcher would go down. These are different ways in which autonomy has potential to benefit the research sphere, but also, more broadly, the world.”
Chen graduated early this past February and passed Arcturus on to captains and rising juniors Ami Shi and Karen Guo. “They’re rock stars. The team is in good hands,” Chen says.
Becoming a project manager at Formlabs
Chen graduated a semester early and accepted a project manager position at Formlabs. She brings many lessons from MIT to her work. “The biggest thing that I’ve learned is that I don’t need to know everything. Part of being successful is knowing what you don’t know. So I’m always aware that in every Arcturus meeting, and probably every technical meeting that I’ll be in at Formlabs, that I will not be the smartest person in the room. And that’s fine. I don’t need to be the smartest person ever because that’s not my job. My job is to bring these projects together and know enough about all the systems to integrate them.”
Chen is thrilled to stay near MIT after graduation, allowing her the opportunity to visit her friends and continue mentoring Arcturus. Upon announcing her new job, she remarked, “To my friends at MIT, I’ll be just down the street, so you won’t be able to get rid of me that easily!”
#2022#2023#2024#3d#3D printing#Admissions#air#Air traffic#approach#Aptitude#autonomous vehicles#background#Business#career#Clubs and activities#code#competition#coral reefs#data#Design#Diversity and Inclusion#drone#easy#Edgerton#Electronics#engineering#Environment#eyes#freshwater#Full
1 note
·
View note
Text
IIT Jodhpur develops 3D-Printed drone for use in air, land and water
IIT Jodhpur’s drone for air, water and land use: Researchers at the Indian Institute of Technology (IIT) Jodhpur have unveiled a groundbreaking innovation – a 3D-printed hybrid unmanned aerial-underwater vehicle (UAV). This versatile drone can transition seamlessly between land, air, and water, making it ideal for various applications.
Inspired by the Anhinga bird, known for its adept movement on…

View On WordPress
0 notes
Text
India’s IIT Jodhpur develops 3D-Printed drone for use in air, land and water
IIT Jodhpur’s drone for air, water and land use: Researchers at the Indian Institute of Technology (IIT) Jodhpur have unveiled a groundbreaking innovation – a 3D-printed hybrid unmanned aerial-underwater vehicle (UAV). This versatile drone can transition seamlessly between land, air, and water, making it ideal for various applications.
Inspired by the Anhinga bird, known for its adept movement on…

View On WordPress
0 notes
Text
In today’s fast-paced world of logistics innovation and evolution have become the driving forces behind success. As we step into 2024, the logistics sector will undergo extensive disruptions, fueled by game-changing innovations that promise to revolutionize supply chain management as we know it.
At iFour, we take immense pride in our expertise in the logistics industry, and we are excited to share with you the trends that are currently transforming this dynamic sector in Australia. As a leading custom Logistics software development company, we understand the unique challenges and opportunities facing businesses in the Australian market.
Here are the key trends that are reshaping the logistics landscape and how our solutions can help your company stay ahead of the curve.
#Supply Chain Technology#E-commerce Logistics#Automation and Robotics#Blockchain in Logistics#Sustainable and Green Logistics#Last-Mile Delivery Solutions#Data Analytics and Predictive Insights#3D Printing in Logistics#IoT (Internet of Things) in Supply Chain#Artificial Intelligence in Transportation#On-Demand and Sharing Economy Logistics#Digital Twins in Warehousing#Autonomous Vehicles and Drones#Climate Change and Resilience Planning#Cross-Border Trade and Customs#Cybersecurity in Supply Chain#Inventory Management Strategies#Reverse Logistics and Returns#Multi-Modal Transportation#software outsourcing#software development company#.net development
0 notes
Video
youtube
FLYING PUMPKIN HALLOWEEN SPECIAL
#youtube#happy halloweeeeeeen#halloween#pumpkin#drone#flying#rc#flyingpumpkin#3d printing#scary#horror
0 notes
Last Seen Blogs

mtreebeardiles
MTreebeardiles

apolloniangods-blog
Apollonian Gods

doomtrooper77
BRUTE AI

chicken-hat
Chicken Hat
