#autonomous robot
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
There were a total of 171.5 billion posts on Tumblr in 2019.
Text
QR Code Recognition Tracking, a variety of QR Code Recognition packages are available in ROS, which allows the robot to follow forward and backward, left and right by moving the QR Code.
#artificial intelligence (ai)#science and technology#higher education#ros#innovation#robot#agv#robotics#autonomous robot#intelligent#qr
4 notes
·
View notes
Text

Why Warehouses Are Adopting Vulcan, the Autonomous Cleaning Robot for Smarter Maintenance
Warehouses are high-traffic environments where cleanliness plays a crucial role in safety, efficiency, and compliance. With dust, spills, and debris accumulating daily, maintaining a spotless warehouse floor is essential but often overlooked. Without proper cleaning, dust can impact air quality, create hazards, and reduce equipment efficiency.
Traditional cleaning methods struggle to keep up with large-scale warehouse operations. This is where Vulcan, an autonomous warehouse cleaning robot, is making a difference. Designed with AI-driven technology, Vulcan offers intelligent, uninterrupted cleaning, ensuring warehouse floors remain pristine without disrupting workflow.
Why Warehouse Cleaning Matters More Than You Think
A well-maintained warehouse provides more than just aesthetics—it’s essential for:
Worker Safety – Spills and debris increase the risk of slips, falls, and injuries.
Equipment Longevity – Dust and dirt can clog machinery, leading to inefficiencies.
Regulatory Compliance – Warehouses must meet strict hygiene and safety standards.
Uninterrupted Workflow – A clean warehouse ensures seamless daily operations.
Ignoring these challenges can slow down productivity, leading to costly delays and potential safety hazards.
How Vulcan Enhances Warehouse Cleaning Efficiency Vulcan is built with smart AI-powered navigation, allowing it to detect and clean high-traffic areas, navigate around obstacles, and maintain cleaning efficiency. Unlike traditional methods, Vulcan works continuously, keeping warehouse floors spotless 24/7.
Key Features of Vulcan: The Advanced Warehouse Cleaning Robot
Autonomous Navigation – AI-driven mapping for seamless movement across warehouse floors.
Smart Deep Cleaning – Effectively removes dust, spills, and debris.
Intelligent Obstacle Avoidance – Navigates around workers, pallets, and equipment.
Real-Time Monitoring – Allows warehouse managers to track cleaning performance remotely.
Low-Noise Operation – Cleans efficiently without disrupting workflow.
With intelligent automation, Vulcan ensures consistent, thorough cleaning that keeps industrial spaces safe and optimized for operations.
Which Warehouses Benefit Most from Vulcan?
Vulcan is designed for various industrial settings, including:
E-commerce Warehouses
Logistics & Distribution Centers
Manufacturing Facilities
Cold Storage Warehouses
Warehouses in these industries require continuous maintenance, making Vulcan the ideal cleaning solution.
The Future of Warehouse Cleaning Is Here
Automation is transforming warehouse management, and Vulcan is leading the way in industrial cleaning solutions. By implementing smart AI-driven cleaning, warehouses can reduce operational challenges, enhance workplace safety, and maintain superior hygiene standards.
Stay ahead of the competition with Vulcan, the ultimate warehouse floor cleaning robot.
#Warehouse Cleaning Robot#Cleaning Robot#Industrial Cleaning Robot#Warehouse Robots#Autonomous Robot
1 note
·
View note
Text
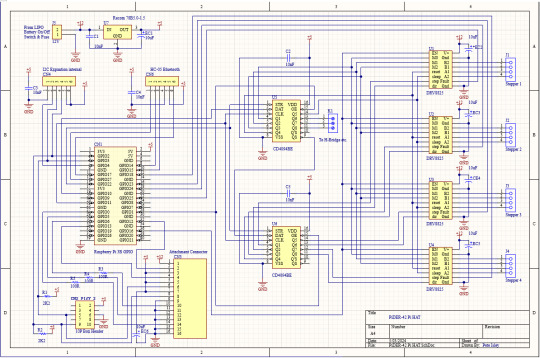
Today (Friday 3rd May 2024) I finally got the schematic of the matrix board plus a few improvements drawn out in the PCB CAD system ready for the next stage of laying out the board. I will probably ponder over this for a few weeks just in case I want to change or improve something else. Two of the signal lines on the attachment connector have been changed to include the I2C channel, as I feel that this could be a very useful communications link for any future attachments that we might need to provide for the robot. Also the DRV8825 driver modules provide a 'Fault' output pin that the previous drivers didn't have. So these four lines have been connected to the Pi for monitoring by the software. The two CD4094 shift register latches are loaded using the Pi's SPI interface and then all sixteen bits are latch simultaneously by a single line from the Pi. It is the most effective way to add lots of synchronised digital output lines to the Pi.
1 note
·
View note
Text
The most important consideration to be made when using Mecanum wheels is for them to work correctly all four should touch the surface at all times.
Our solution to this is to have a body that is able to twist somewhere along its length, enabling stable movement over very uneven ground.

1 note
·
View note
Text
How come no one ever talk about how much this thing fucks?

Like LOOOKK AT HERRRRRRR




They starts out in a tetrapod config and is like "okay lemme stand on both feet so i can turn this idiot into paste"
Sucks we dont get her melee weapon because a ground slam attack in this game would go crazy on style points
#armored core#mecha#armored core 6#handler walter#augmented human c4 621#ayre#ac6#PCA autonomous security#pca enforcer#autonomous security robot#she/they#oh yeah this fucks#cool robot
713 notes
·
View notes
Text
blinkies i made for myself !! :3













btw peach cupcakes is airi x natsuki's ship name since i said so. ha. yeah.
#🧁 sweet shenanigans#jiraiblr#blinkie#blinkies#web resources#web resource#web graphics#peach cupcakes#airisuki#airi momoi#project sekai#pjsk#natsuki#ddlc#doki doki literature club#mayu#mayu vocaloid#vocaloid#vflower#vflower vocaloid#utane uta#defoko#utau#nurse robot type t#pomemori#reml#decentralized autonomous golem reml#cevio#sukone tei
96 notes
·
View notes
Text
The 5G security inspection robot system RS-INS adopts a multi-device coupling system, starting from mechanism design and optimization, motion planning and control, state estimation and environment sensing, etc. It realizes 4K HD backhaul, remote real-time control, multi-line patrol, target tracking and localization, daytime + nighttime dual-lighting shooting, etc. through a 5G network. It supports multi-channel video-on-demand and video playback. It supports multi-video on-demand and video playback and can realize routine inspection in complex terrain, remote cloud operation, automatic archiving and analysis in the background, etc. It solves the problems of high intensity of manual inspection, uneven quality, and inability to adapt to the complex terrain of the substation, and explores intelligent security and inspection.
#artificial intelligence (ai)#science and technology#5g#higher education#ros#robot#innovation#intelligent#autonomous robot#agv#robotics
4 notes
·
View notes
Text





Complex render commission for Night-expo! We cranked up the cinematic mecha vibe for this one-- this one is by far one of my favorite illustrations from this year! 📸🔥 Full Timelapse: https://www.youtube.com/watch?v=PKvCmIkrucs
#robotfight#turfwar#art#timelapse#twitchstreamer#commissionart#robot#mech#conceptart#characterart#mecha#robotart#vgen#vgencommission#monoeye#autonomous#gundam#mobilesuit#scarf
123 notes
·
View notes
Text
still trying to figure out how to exactly draw these lil guys so more doodles wahoo! ( plus oc woa- )




#logic as a oc is pretty unoriginal i know#quq#doodle#inside out anxiety#inside out 2#inside out#anxiety why are you both so fun to draw but also so difficult to d r a w#logic my silly lil fella#kinda a robot#also sorta inspired off of like#windows a tad#thinking about how these emotions work in different scenarios is really fun#but like - are there also lil guys in places like your heart and stuff??#how far does the rabbit hole go????#is there drama in my head that i am completely unaware about ??#do these emotions see me thinking about them and get a tad awkward about it ???#if i know that there are little guys in my head am i like#still a autonomous person or just a kind of vessel with character traits here or there#what dictacts what?? who controls who and what i do ????#anyways yeah silly guys love them with my little heart#pat pat on head
172 notes
·
View notes
Text

#transformers#g1#transformers: generation 1 s02e31#i do like in the episode we learn more about the universe as a whole#like a) there is like williams more alien species out there#b) because there are so many aliens out there not everyone has heard of transformers but are not surprised by them#c) most aliens assume that transformers are non sentient servant robots that often rattle around the planets#but after they start talking they quickly go “oh shit a person” and treat them normally#(which now makes sense why the transformers introduce themselves as “autonomous robots from cybertron” they must get this a lot)#d) energon is not a unique to transformers and is a common tradable resource
28 notes
·
View notes
Text
Fallen at the last fence. We could not compete on Sunday April 21st 2024 because during last minute testing and bug fixing on the evening before, one of the 4988 motor drive modules overheated and failed with no spare replacement. My (Pete) own silly fault for not realising that the stepper motors had become energised and the cooling fan for the drivers was not running.
This is not the end of development, as we are passionate about autonomous robotics. So where do we go from here? 1) A re-build of the Pi-Hat. This board has evolved during the last year of development and has become very messy and unmanageable, with lots of connecting cables and wires to other modules. The number of interconnects will remain the same or increase but can be made neater with boxed headers instead of open pin headers and the motor drivers board can bebcome part of the hat, reducing the bunched up ribon cable between the separate boards. Also etch a PCB rather than using matrix board. 2) The cooling fan will no longer be powered via on/off control, but will instead be powered directly from the 12V rail. So when the power is on so is the fan. 3) Try to incorporate a Teensy microcontroller on the Pi-hat too and use it for all servo PWM generation as the Raspberry Pi is useless for PWM. The reason for that is because the Pi's PWM is software generated and jitters like crazy because of higher priority interrupts. The Teensy on the other hand is perfectly stable. 4) build a complete and identical second robot, so parts could be taken from it should they be needed as spares for the primary. 5) Look at the possibly of adding a 2:1 reduction gearbox to the wheel/motor assemblies, halving the motor rpm at the wheel but doubling the torque. This would also permit better cooling of the motors with heat sinks on the motor backs, venting out of the top of the robot's bodywork. 6) Add all the flashy LED's that we didn't have time to do for 2024. That is what we have so far. This list may increase as time passes.
0 notes
Text
I'm sure I don't need to tell any 'Good' software engineer that regression test is essential.
i.e. Test, test, test and then test some more. Every time you change or add code to your system, even if it is unrelated to other parts as a whole, the entire system should be tested to ensure there are no knock-on effects from the code that has changed or newly added.
Zombies are a particular problem, especially when you have a crazy Animal in control of the blaster, who prefers to shoot everything except Zombies.
0 notes
Text
Design for autonomous maximus The great dome of iacon , vector sigma , and auntie vector sigma's avatar to the future
beneath the montain, vector sigma guided the transformers as their maternal god, and as society emerged around her resting place, the mountain came to life to protect it's mother computer by joining the autobots,
Remaining on the planet after vector Sigma's deactivation, it's said that autonomous maximus is still on cybertron to this day as its last autobot while his body became the basis for arks that Shepherd his fellow autobots off world



Deep bellow cybertron lay the allspark powered mother computer vector sigma, responsible for running the great machine that was cybertron, she sees the transformers as her children so she showered them with great love but infantilized them in her head as unable to do evil, so she did not act as their society corroded, secluded away in her chamber where she could gaze milions of years into the future, she guided cybertron's ecosystem into becoming a mechanical version of earth with robot animals and of course robot humans in the transformers, as she knew even back then that the unremarkable earth would play a great role in her children's history,

With her knowlege of the future she created messages put into the right places to allow her to comunicate wifh future generations she sees herself as a god but her nature is entirely mechanical, she doesn't even have a spark, and her ability to see the future is based on algorithms and what she already knows via the "sensory organs" of cybertron, so sometimes her messages spiral off into tangents and nonsense after having predicted the wrong response from her intended listener
In messages for earth, Vector Sigma uses an avatar called auntie as she sees earth as a sister to cybertron. Though its residents aren't fully on board with the idea, it's like that aunt or uncle you barely know that acts way too chumy with you in a way that's off-putting rather than charming,
Above her chamber stood the city of iacon, greatly respected, but over the years, it became the house of all corruption on cybertron as the functionist council excavated it's great dome to act as their captital. The building itself shackled as iacon grew into a massive metropolis, and all the spilled energon that naturally came from its massive population threatened to bring the building to life,
when the revolution tore down the government, the restrains were destroyed, and the building began reformating itself with a robot mode just as megatronus and liege maximo revealed their aliance with bruticus maximus. But before they could end the autobots with their opening assault autonomous maximus awakened, and in a split second decision, protected the autobots from harm with a single mighty punch
With the newly christened decepticons retreating, the autobots named themselves after the giant that saved them and over the course of the next milenia civil war between the autobots and decepticons raged until the two sides had captured so much terrain and became so diferent from each other they were separate nations, nations whose war plundered cybertron and the world off of it's resources until the planet was spent.
The autobots omit this part of the story, but it was the autobots who took the allspark and tossed it into space to keep it away from the hands of the decepticons, quickly regretting that action as the planet died around them, the part they do tell is that the surviving transformers hid away inside titans like autonomous maximus, overcome with the weight of sins on their back, they began to construct arks to search for the allspark, all based on autonomous maximus' design, each housing three great titans
While maximus himself opted to stay behind on cybertron. Loyal to it's mother above all even as her lifeless husk hung from the celling of her chamber, to give the arks power to lift off prima used the star saber to gather celestial power into the arks, dissipating her body entirely, while maximus fought off the decepticons wishing to attack the arks,
or at least thats what they tell you. Even a most basic analysis of the story would tell you the decepticons obviously also wanted to escape the planet, meaning the ancient autobots were willing to let their enemies die from their own atrocity. What could have happened to turn a culture like any other with its complexities and grey morality into heroes?
Guilt. With the fall of cybertron, the autobots became suicidal, and their leaders had to turn that self-destructive impulse into the service of others, ideas that permiated autobot ranks to this day, as new generations were born aboard the ships, that initial melancholy faded away as the new faces never stepped foot on cybertron,
but from the moment they came online, the autobots were taught to live for the well-being of others as their number one priority, till all are one, drilling that message into their heads is their society's one goal, as with anything their sucess rate varies (see barricade). While their search for the allspark became myth, then legend,
It was in that world that our autobots, natives of ark primax came from, and that leads us to today, with them telling the story to the earth's own population of transformers, most are skeptical of certain aspects of the tale, but the mistress of flame is enchanted by their story, dispite their claims otherwise, easily becoming part of her view of cybertronians as gods
#transformers#transformers fanart#cybertronian#robot#robots#character design#autobots#maccadams#maccadam#transformers from a to z#autonomous maximus#the last autobot#the autobot ark#transformers kingdom#iacon#iacon city#vector sigma#auntie#transformers marvel#auntie looking like shodan is very intentional#ominious hehehe
45 notes
·
View notes
Text
Whenever someone asks my favourite show i stop myself from doing uzi's presentation speech thing
*THROWS N AT YOU*

*scurries away to draw*
#Murder drones#WE ARE WORKER DRONES AUTONOMOUS ROBOTS DESIGNED TO MINE EXOPLANETS FOR OUR PARENT COMPANY JC JESNSON IN SPAAA--
16 notes
·
View notes
Text
The air-ground cooperative formation system (RS-MUL), mainly consists of intelligent UAVs, intelligent unmanned vehicles, a positioning system, a networking communication system, and five parts of the multi-intelligence body cooperative control system. The positioning system acquires the real-time position of UAV and unmanned The positioning system acquires the real-time position of the UAV and unmanned vehicle and sends it to each unmanned vehicle using the network communication module. The unmanned vehicle obtains the information of the body and the position information of the neighboring aircraft through the communication system, and completes the cooperative control of the unmanned vehicle through the set control algorithm, Through the set control algorithm, the cooperative control of the unmanned vehicle and unmanned aircraft is accomplished. The system can realize different behaviors in different scenarios, including real-time tracking, formation, and convoying of UAVs and unmanned vehicles. The system can realize different behaviors in different scenarios, including UAV and UAV real-time tracking, formation, and formation change; single-vehicle and single-machine coordination; multi-vehicle and multi-machine coordination; ground station control of the single vehicle; vehicle group network expansion; ground station cluster formation simulation
#uav#military#ros#robot#innovation#robotics#agv#autonomous robot#higher education#intelligent#science and technology#artificial intelligence (ai)#execution#soldiers#navy#us military#us marines
3 notes
·
View notes