#dynamixel
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
There are dozens of funny blogs to kill time on Tumblr.
Text


OmniCovered (2004) by Takeshi Maeda, Vstone, Osaka. OmniCovered is a bipedal humanoid competition robot developed for ROBO-ONE 6. Instead of aluminium sheet metal, it has a fibreglass reinforced plastic (FRP) frame, with a white exterior made of laminated ABS resin. It uses new Hitec HSR-5995TG ultra-torque robot servos, and the image processing required the faster Renesas 40MHz 32-bit SH-2 CPU. Its chest bears the autograph of Aerosmith's Steven Tyler, who was impressed when he saw another of Takeshi Maeda's robots in Tokyu Hands (東急ハンズ, Tōkyū Hanzu), a chain of Japanese hobby stores.
"Saturday, qualifying round. Dual sword fighting, image processing balloon popping, and 15cm climbing were all successful, but I ended up in 2nd place. I lost to A-Do again… If I think about it, I was also arrogant, thinking that if all the demonstrations were successful, along with the monocoque exterior, I would be able to qualify for first place. … Sunday, main game. He was suddenly hit by the robot equipped with the Dynamixel servos (ROBOTIS) that I was afraid of, and was defeated in the first round." – Takeshi Maeda, Robotan Production Diary.
At ROBO-ONE 6, OmniCovered came 2nd in the qualifying rounds, but lost in the first game of the finals.
54 notes
·
View notes
Text
🤖 13 ANIMALES ROBOT, cuando la NATURALEZA y la TECNOLOGÍA se Fusionan

¿Sabías que hay algún robot que pueden imitar el comportamiento de los animales más increíbles? ¿Te gustaría ver cómo funcionan y qué pueden hacer? Pues no te pierdas este vídeo, porque te voy a mostrar algunos de los animales robot más sorprendentes que existen. Desde un perro robot que puede correr y saltar, hasta una serpiente robot que puede deslizarse. Te aseguro que vas a quedar sorprendido con lo que estos robots son capaces de hacer. Así que ya sabes, si te gustan los animales y la tecnología, descubre en este vídeo cual es tu favorito y déjalo en los comentarios. El vídeo: https://youtu.be/phzw6OB3nX8 13 ANIMALES ROBOT, cuando la NATURALEZA y la TECNOLOGÍA se Fusionan: MX-Phoenix hexapod: El MX-Phoenix es un proyecto de Zenta Robotic Creations, una empresa dedicada al diseño de robots avanzados para aficionados. El creador del robot es Zenta, un ingeniero sueco que lleva más de 10 años construyendo robots hexápodos. El MX-Phoenix es una evolución de su primer robot, el Phoenix, que hizo hace una década. Es un robot hexápodo tiene 18 servos Dynamixel de alta potencia y precisión que le permiten mover sus seis patas con gran agilidad y suavidad. Este algoritmo, llamado DynaZgait, permite al robot adaptarse al terreno y cambiar la velocidad y la altura de las patas según la situación. El robot también tiene un sensor IMU que le ayuda a mantener el equilibrio. Es capaz de caminar por superficies irregulares, subir y bajar escalones, girar sobre sí mismo y hasta bailar. Harvard Arthrobots: Este robot está inspirado en los artrópodos, es decir, los animales invertebrados que tienen el cuerpo segmentado y las patas articuladas, como los insectos, los crustáceos o las arañas. Los arthrobots son robots que imitan la estructura y el movimiento de estos animales, lo que les permite adaptarse a diferentes terrenos y obstáculos. Se trata de un robot modular que se puede ensamblar y desensamblar fácilmente, cambiando el número y la forma de sus segmentos y patas. El robot está hecho de un material flexible que se puede doblar y estirar mediante la aplicación de una corriente eléctrica. Así, el robot puede cambiar su forma y su modo de locomoción según las necesidades del entorno. Podría usarse para explorar lugares difíciles de acceder, como cuevas, túneles o zonas de desastre. El robot Harvard Arthrobots es un ejemplo de cómo la naturaleza puede inspirarnos para crear tecnologías innovadoras y útiles. MIT MINI Cheetah: Es un robot cuadrúpedo que puede correr, saltar, girar y hasta hacer volteretas. Mide unos 50 centímetros de alto y pesa unos 9 kilos, lo que lo hace muy manejable y portátil. El robot puede alcanzar una velocidad máxima de unos 8 kilómetros por hora, y puede saltar hasta medio metro de altura. Además, tiene un sistema de control que le permite adaptarse al terreno y mantener el equilibrio en situaciones difíciles. Por ejemplo, puede recuperarse si se cae o si recibe un empujón, o puede sortear obstáculos como escaleras o troncos. También es una muestra de cómo la robótica puede ser divertida y entretenida, ya que el robot también juega al fútbol o al pilla-pilla con otros robots o con humanos. El objetivo de los investigadores del MIT es crear robots que puedan interactuar con las personas de forma amigable y cooperativa, y que puedan ayudar en tareas como el rescate o la exploración. Kawasaki Bex: También es un robot cuadrúpedo y está inspirado en una cabra montesa, con cuernos incluidos. Puede transportar hasta 100 kilos de carga y moverse por terrenos irregulares o lisos gracias a sus patas y ruedas. Además, se puede montar en él y conducirlo con unas manijas integradas. Bex forma parte del proyecto Kaleido de Kawasaki, que busca desarrollar robots modulares que se adapten a diferentes necesidades y escenarios. Según sus creadores, Bex está pensado para aplicaciones como el transporte de materiales en obras, la inspección de plantas industriales o el transporte de cultivos en granjas. Lo que más me llama la atención de Bex es su capacidad para cambiar de modo de locomoción según el tipo de superficie. En terrenos escarpados o con obstáculos, Bex camina a cuatro patas como una cabra, manteniendo el equilibrio y la estabilidad. Robot Rat SQuRo: Es otro robot cuadrúpedo que imita el movimiento de una rata porque son animales muy ágiles, inteligentes y adaptables, capaces de superar obstáculos y explorar entornos complejos. El Robot Rat SQuRo tiene estas mismas características, y puede ser usado para fines científicos, educativos o recreativos. Tiene un cuerpo flexible y articulado, que le permite moverse como una rata real. Tiene sensores táctiles, auditivos y visuales, que le permiten percibir el entorno y reaccionar a los estímulos. También tiene un sistema de aprendizaje automático, que le permite aprender de sus experiencias y mejorar sus habilidades. Es un ejemplo de cómo la robótica puede inspirarse en la naturaleza para crear máquinas más eficientes y versátiles. Puede tener muchas aplicaciones prácticas, como la exploración de terrenos peligrosos, el rescate de personas atrapadas, el estudio del comportamiento animal o el entretenimiento de los niños. Titanoboa: Se trata de una réplica robótica de una serpiente prehistórica que vivió hace unos 60 millones de años y que medía unos 15 metros de largo. El robot Titanoboa fue creado por un grupo de artistas e ingenieros canadienses que querían recrear la sensación de estar frente a una criatura tan impresionante y aterradora. El robot se mueve como una serpiente real, con ondas que recorren su cuerpo metálico. Se ha exhibido en varios festivales y eventos de arte y tecnología alrededor del mundo, donde ha causado sensación entre el público. Algunas personas se atreven a acercarse y tocarlo, mientras que otras prefieren mantenerse a una distancia prudente. El objetivo de los creadores del robot es generar conciencia sobre la extinción de las especies y el impacto del cambio climático en el planeta. El Titanoboa es un ejemplo de cómo la tecnología puede servir para explorar la historia natural y la imaginación humana. Snakeskin Robot: Es un robot que imita la piel de las serpientes para desplazarse por diferentes superficies. El robot Snakeskin Robot fue desarrollado por investigadores de Harvard, que se basaron en las propiedades de fricción anisotrópica de las escamas de las serpientes. Esto significa que las escamas tienen más agarre en una dirección que en otra, lo que permite a las serpientes avanzar haciendo ondas con su cuerpo. El robot tiene una piel artificial hecha de láminas de plástico estirable, grabadas con láser con diferentes patrones de escamas. Al inflar y desinflar el robot, las escamas se deforman y se levantan del cuerpo, creando una tracción con el suelo. Los investigadores probaron varios tipos de escamas, y encontraron que las mejores eran las trapezoidales, que se parecen más a las de las serpientes reales. El robot Snakeskin Robot tiene muchas aplicaciones potenciales, como la búsqueda y rescate, la inspección industrial o la medicina. Robobee: Es para aquellos que les guntan los proyecto de bricolaje. Se trata de un kit para construir una avispa robótica inusual en unas cuatro horas de diversión. El kit está formado por cientos de piezas por lo que es importante nerner paciencia a la hora de montarlo. Existen dos versiones, la ordinaria y otra con efectos de luz y sonido. Las dimensiones aproximadas tras su montaje es de 20 por 20 por 20 centímetros. Sus principales matariales son hierro y cobre y su peso de aproximadamente 1 kilogramo. El kit incluye destornillador, alicates, dos versiones de alas y de cola. MIT RoboTuna: Es un robot que imita el movimiento de los atunes, uno de los peces más rápidos y ágiles del océano. RoboTuna fue creado por el Instituto Tecnológico de Massachusetts para estudiar la hidrodinámica de los peces y mejorar el diseño de los vehículos submarinos. Tiene un cuerpo flexible y una cola que se mueve de lado a lado, como los atunes reales. Puede nadar a una velocidad de hasta 1,5 metros por segundo y cambiar de dirección rápidamente. RoboTuna es capaz de seguir una trayectoria preprogramada o reaccionar a los estímulos del entorno, como la luz o el sonido. Los investigadores del MIT esperan que RoboTuna sirva de modelo para desarrollar robots submarinos más avanzados y versátiles, que puedan explorar el fondo marino, realizar misiones de rescate o vigilancia, o incluso interactuar con los animales acuáticos. Stickybot: Es un robot que puede escalar paredes como un gecko, gracias a unas patas especiales que se adhieren a las superficies. Fue desarrollado por la Universidad de Stanford y es uno de los ejemplos más impresionantes de la robótica inspirada en la naturaleza. El Stickybot no solo es capaz de escalar paredes, sino que también puede cambiar de dirección, saltar y caminar por el techo. Estas habilidades podrían ser muy útiles para explorar lugares difíciles de acceder o realizar tareas de rescate o vigilancia. También es una herramienta para estudiar la biomecánica y la física de los geckos y otros animales escaladores. Este robot combina la ciencia y la tecnología para crear una máquina que imita la vida. El Stickybot me hace pensar en las posibilidades infinitas que tiene la robótica y en lo mucho que podemos aprender de los animales. Flying Goose: Es un robot alemán que puede volar como un ganso y que tiene muchas aplicaciones prácticas y divertidas. Flying Goose es un robot que imita el vuelo de los gansos, usando unas alas articuladas que se mueven con un motor eléctrico. El robot puede seguir una ruta preprogramada o controlada por un mando a distancia. El robot puede volar hasta 20 minutos con una sola carga de batería. Puede usarse para estudiar el comportamiento de las aves migratorias, para monitorear el cambio climático, para explorar zonas de difícil acceso o para hacer fotografías aéreas. El robot también puede usarse para divertirse, ya que se puede volar como un juguete o como parte de un espectáculo artístico. Flying Goose es un robot que demuestra cómo la tecnología puede aprender de la naturaleza y crear soluciones innovadoras y sostenibles. Festo AquaPenguin: Los ingenieros de Hannover se inspiraron en los pingüinos reales para crear este robot que tiene el mismo diseño aerodinámico y el mismo principio de propulsión por alas. Es un vehículo submarino autónomo (AUV) que puede orientarse y navegar de forma independiente por un tanque de agua, y desarrollar patrones de comportamiento variables y diferenciados en grupo. El AquaPenguin tiene unas alas que están compuestas por un esqueleto de elementos de acero elástico incrustados en una matriz de silicona que les da su perfil. Las alas pueden girar a un ángulo óptimo en interacción con las fuerzas hidrodinámicas en cada golpe, y también se puede regular el ángulo de inclinación de forma interactiva. El robot puede maniobrar en espacios reducidos, girar sobre sí mismo cuando sea necesario y, a diferencia de sus arquetipos biológicos, incluso nadar hacia atrás. También tiene sensores inteligentes que le permiten evitar colisiones en el funcionamiento en grupo, controlar la profundidad, la presión y la temperatura, y mantener la estabilidad posicional. El robot es un ejemplo de cómo la naturaleza puede servir de laboratorio para procesos eficientes y cómo se puede transferir esta tecnología a la automatización. Squidbot: Es un robot inspirado en el calamar, que puede nadar, cambiar de color y hasta disparar chorros de agua. Según sus creadores, tiene varias aplicaciones potenciales, como la exploración submarina, el monitoreo ambiental y la educación. Squidbot tiene un cuerpo flexible y elástico que se mueve con impulsos eléctricos. También tiene una cámara y sensores que le permiten detectar su entorno y adaptarse a él. Y lo más divertido es que puede cambiar de color usando unas células especiales llamadas cromatóforos, que imitan a las de los calamares reales. Así puede camuflarse o comunicarse con otros robots. ¿No te parece increíble? Te puede interesar: - ☄️ 10 CATÁSTROFES que podrían ocurrir en el FUTURO - 🪐 El PLANETA Misterioso del Sistema Solar Read the full article
0 notes
Text
🤖 13 ANIMALES ROBOT, cuando la NATURALEZA y la TECNOLOGÍA se Fusionan

¿Sabías que hay algún robot que pueden imitar el comportamiento de los animales más increíbles? ¿Te gustaría ver cómo funcionan y qué pueden hacer? Pues no te pierdas este vídeo, porque te voy a mostrar algunos de los animales robot más sorprendentes que existen. Desde un perro robot que puede correr y saltar, hasta una serpiente robot que puede deslizarse. Te aseguro que vas a quedar sorprendido con lo que estos robots son capaces de hacer. Así que ya sabes, si te gustan los animales y la tecnología, descubre en este vídeo cual es tu favorito y déjalo en los comentarios. El vídeo: https://youtu.be/phzw6OB3nX8 13 ANIMALES ROBOT, cuando la NATURALEZA y la TECNOLOGÍA se Fusionan: MX-Phoenix hexapod: El MX-Phoenix es un proyecto de Zenta Robotic Creations, una empresa dedicada al diseño de robots avanzados para aficionados. El creador del robot es Zenta, un ingeniero sueco que lleva más de 10 años construyendo robots hexápodos. El MX-Phoenix es una evolución de su primer robot, el Phoenix, que hizo hace una década. Es un robot hexápodo tiene 18 servos Dynamixel de alta potencia y precisión que le permiten mover sus seis patas con gran agilidad y suavidad. Este algoritmo, llamado DynaZgait, permite al robot adaptarse al terreno y cambiar la velocidad y la altura de las patas según la situación. El robot también tiene un sensor IMU que le ayuda a mantener el equilibrio. Es capaz de caminar por superficies irregulares, subir y bajar escalones, girar sobre sí mismo y hasta bailar. Harvard Arthrobots: Este robot está inspirado en los artrópodos, es decir, los animales invertebrados que tienen el cuerpo segmentado y las patas articuladas, como los insectos, los crustáceos o las arañas. Los arthrobots son robots que imitan la estructura y el movimiento de estos animales, lo que les permite adaptarse a diferentes terrenos y obstáculos. Se trata de un robot modular que se puede ensamblar y desensamblar fácilmente, cambiando el número y la forma de sus segmentos y patas. El robot está hecho de un material flexible que se puede doblar y estirar mediante la aplicación de una corriente eléctrica. Así, el robot puede cambiar su forma y su modo de locomoción según las necesidades del entorno. Podría usarse para explorar lugares difíciles de acceder, como cuevas, túneles o zonas de desastre. El robot Harvard Arthrobots es un ejemplo de cómo la naturaleza puede inspirarnos para crear tecnologías innovadoras y útiles. MIT MINI Cheetah: Es un robot cuadrúpedo que puede correr, saltar, girar y hasta hacer volteretas. Mide unos 50 centímetros de alto y pesa unos 9 kilos, lo que lo hace muy manejable y portátil. El robot puede alcanzar una velocidad máxima de unos 8 kilómetros por hora, y puede saltar hasta medio metro de altura. Además, tiene un sistema de control que le permite adaptarse al terreno y mantener el equilibrio en situaciones difíciles. Por ejemplo, puede recuperarse si se cae o si recibe un empujón, o puede sortear obstáculos como escaleras o troncos. También es una muestra de cómo la robótica puede ser divertida y entretenida, ya que el robot también juega al fútbol o al pilla-pilla con otros robots o con humanos. El objetivo de los investigadores del MIT es crear robots que puedan interactuar con las personas de forma amigable y cooperativa, y que puedan ayudar en tareas como el rescate o la exploración. Kawasaki Bex: También es un robot cuadrúpedo y está inspirado en una cabra montesa, con cuernos incluidos. Puede transportar hasta 100 kilos de carga y moverse por terrenos irregulares o lisos gracias a sus patas y ruedas. Además, se puede montar en él y conducirlo con unas manijas integradas. Bex forma parte del proyecto Kaleido de Kawasaki, que busca desarrollar robots modulares que se adapten a diferentes necesidades y escenarios. Según sus creadores, Bex está pensado para aplicaciones como el transporte de materiales en obras, la inspección de plantas industriales o el transporte de cultivos en granjas. Lo que más me llama la atención de Bex es su capacidad para cambiar de modo de locomoción según el tipo de superficie. En terrenos escarpados o con obstáculos, Bex camina a cuatro patas como una cabra, manteniendo el equilibrio y la estabilidad. Robot Rat SQuRo: Es otro robot cuadrúpedo que imita el movimiento de una rata porque son animales muy ágiles, inteligentes y adaptables, capaces de superar obstáculos y explorar entornos complejos. El Robot Rat SQuRo tiene estas mismas características, y puede ser usado para fines científicos, educativos o recreativos. Tiene un cuerpo flexible y articulado, que le permite moverse como una rata real. Tiene sensores táctiles, auditivos y visuales, que le permiten percibir el entorno y reaccionar a los estímulos. También tiene un sistema de aprendizaje automático, que le permite aprender de sus experiencias y mejorar sus habilidades. Es un ejemplo de cómo la robótica puede inspirarse en la naturaleza para crear máquinas más eficientes y versátiles. Puede tener muchas aplicaciones prácticas, como la exploración de terrenos peligrosos, el rescate de personas atrapadas, el estudio del comportamiento animal o el entretenimiento de los niños. Titanoboa: Se trata de una réplica robótica de una serpiente prehistórica que vivió hace unos 60 millones de años y que medía unos 15 metros de largo. El robot Titanoboa fue creado por un grupo de artistas e ingenieros canadienses que querían recrear la sensación de estar frente a una criatura tan impresionante y aterradora. El robot se mueve como una serpiente real, con ondas que recorren su cuerpo metálico. Se ha exhibido en varios festivales y eventos de arte y tecnología alrededor del mundo, donde ha causado sensación entre el público. Algunas personas se atreven a acercarse y tocarlo, mientras que otras prefieren mantenerse a una distancia prudente. El objetivo de los creadores del robot es generar conciencia sobre la extinción de las especies y el impacto del cambio climático en el planeta. El Titanoboa es un ejemplo de cómo la tecnología puede servir para explorar la historia natural y la imaginación humana. Snakeskin Robot: Es un robot que imita la piel de las serpientes para desplazarse por diferentes superficies. El robot Snakeskin Robot fue desarrollado por investigadores de Harvard, que se basaron en las propiedades de fricción anisotrópica de las escamas de las serpientes. Esto significa que las escamas tienen más agarre en una dirección que en otra, lo que permite a las serpientes avanzar haciendo ondas con su cuerpo. El robot tiene una piel artificial hecha de láminas de plástico estirable, grabadas con láser con diferentes patrones de escamas. Al inflar y desinflar el robot, las escamas se deforman y se levantan del cuerpo, creando una tracción con el suelo. Los investigadores probaron varios tipos de escamas, y encontraron que las mejores eran las trapezoidales, que se parecen más a las de las serpientes reales. El robot Snakeskin Robot tiene muchas aplicaciones potenciales, como la búsqueda y rescate, la inspección industrial o la medicina. Robobee: Es para aquellos que les guntan los proyecto de bricolaje. Se trata de un kit para construir una avispa robótica inusual en unas cuatro horas de diversión. El kit está formado por cientos de piezas por lo que es importante nerner paciencia a la hora de montarlo. Existen dos versiones, la ordinaria y otra con efectos de luz y sonido. Las dimensiones aproximadas tras su montaje es de 20 por 20 por 20 centímetros. Sus principales matariales son hierro y cobre y su peso de aproximadamente 1 kilogramo. El kit incluye destornillador, alicates, dos versiones de alas y de cola. MIT RoboTuna: Es un robot que imita el movimiento de los atunes, uno de los peces más rápidos y ágiles del océano. RoboTuna fue creado por el Instituto Tecnológico de Massachusetts para estudiar la hidrodinámica de los peces y mejorar el diseño de los vehículos submarinos. Tiene un cuerpo flexible y una cola que se mueve de lado a lado, como los atunes reales. Puede nadar a una velocidad de hasta 1,5 metros por segundo y cambiar de dirección rápidamente. RoboTuna es capaz de seguir una trayectoria preprogramada o reaccionar a los estímulos del entorno, como la luz o el sonido. Los investigadores del MIT esperan que RoboTuna sirva de modelo para desarrollar robots submarinos más avanzados y versátiles, que puedan explorar el fondo marino, realizar misiones de rescate o vigilancia, o incluso interactuar con los animales acuáticos. Stickybot: Es un robot que puede escalar paredes como un gecko, gracias a unas patas especiales que se adhieren a las superficies. Fue desarrollado por la Universidad de Stanford y es uno de los ejemplos más impresionantes de la robótica inspirada en la naturaleza. El Stickybot no solo es capaz de escalar paredes, sino que también puede cambiar de dirección, saltar y caminar por el techo. Estas habilidades podrían ser muy útiles para explorar lugares difíciles de acceder o realizar tareas de rescate o vigilancia. También es una herramienta para estudiar la biomecánica y la física de los geckos y otros animales escaladores. Este robot combina la ciencia y la tecnología para crear una máquina que imita la vida. El Stickybot me hace pensar en las posibilidades infinitas que tiene la robótica y en lo mucho que podemos aprender de los animales. Flying Goose: Es un robot alemán que puede volar como un ganso y que tiene muchas aplicaciones prácticas y divertidas. Flying Goose es un robot que imita el vuelo de los gansos, usando unas alas articuladas que se mueven con un motor eléctrico. El robot puede seguir una ruta preprogramada o controlada por un mando a distancia. El robot puede volar hasta 20 minutos con una sola carga de batería. Puede usarse para estudiar el comportamiento de las aves migratorias, para monitorear el cambio climático, para explorar zonas de difícil acceso o para hacer fotografías aéreas. El robot también puede usarse para divertirse, ya que se puede volar como un juguete o como parte de un espectáculo artístico. Flying Goose es un robot que demuestra cómo la tecnología puede aprender de la naturaleza y crear soluciones innovadoras y sostenibles. Festo AquaPenguin: Los ingenieros de Hannover se inspiraron en los pingüinos reales para crear este robot que tiene el mismo diseño aerodinámico y el mismo principio de propulsión por alas. Es un vehículo submarino autónomo (AUV) que puede orientarse y navegar de forma independiente por un tanque de agua, y desarrollar patrones de comportamiento variables y diferenciados en grupo. El AquaPenguin tiene unas alas que están compuestas por un esqueleto de elementos de acero elástico incrustados en una matriz de silicona que les da su perfil. Las alas pueden girar a un ángulo óptimo en interacción con las fuerzas hidrodinámicas en cada golpe, y también se puede regular el ángulo de inclinación de forma interactiva. El robot puede maniobrar en espacios reducidos, girar sobre sí mismo cuando sea necesario y, a diferencia de sus arquetipos biológicos, incluso nadar hacia atrás. También tiene sensores inteligentes que le permiten evitar colisiones en el funcionamiento en grupo, controlar la profundidad, la presión y la temperatura, y mantener la estabilidad posicional. El robot es un ejemplo de cómo la naturaleza puede servir de laboratorio para procesos eficientes y cómo se puede transferir esta tecnología a la automatización. Squidbot: Es un robot inspirado en el calamar, que puede nadar, cambiar de color y hasta disparar chorros de agua. Según sus creadores, tiene varias aplicaciones potenciales, como la exploración submarina, el monitoreo ambiental y la educación. Squidbot tiene un cuerpo flexible y elástico que se mueve con impulsos eléctricos. También tiene una cámara y sensores que le permiten detectar su entorno y adaptarse a él. Y lo más divertido es que puede cambiar de color usando unas células especiales llamadas cromatóforos, que imitan a las de los calamares reales. Así puede camuflarse o comunicarse con otros robots. ¿No te parece increíble? Te puede interesar: - ☄️ 10 CATÁSTROFES que podrían ocurrir en el FUTURO - 🪐 El PLANETA Misterioso del Sistema Solar Read the full article
0 notes
Video
instagram
کدومشو دوس داری؟ 😍 ⏰ یه ساعت معمولی سالم یا بازوی رباتیکی که ساعت رو تنظیم کنه. در این بازوی رباتیک از سرو موتورهای جدید DYNAMIXEL XL330_M228_T شرکت ربوتیس کرهجنوبی استفاده شده است. 🇰🇷 و همچنین از برد آردویینو 🍒 با سپاس از @_devdrik برای طراحی و ساخت این بازوی رباتیک. برای آشنایی بیشتر و خرید سرو موتورهای استفاده شده در ساخت این بازو لطفا عدد ۶ را کامنت کنید. I rather have a broken clock and a robot that turns the hands than a normal well-working clock 🤣 Thanks, @_devdrik for making this with #dynamixel #xl330_m288_t #robotacuators #ربات #رباتیک #ربات_پیشرفته #تکنولوژی #فناوری #آردوینو #الکترونیک #مکاترونیک #robotics #robot #poweredbydynamixel #upcycling #overengineered #electronics #hardware #creative #engineering #tech #diyelectronics #science #arduino #arduinoprojects #raspberrypi #3dprint #3dprinting #design @robotis_global (at Tehran, Iran) https://www.instagram.com/p/CQdzInRl4Vi/?utm_medium=tumblr
#dynamixel#xl330_m288_t#robotacuators#ربات#رباتیک#ربات_پیشرفته#تکنولوژی#فناوری#آردوینو#الکترونیک#مکاترونیک#robotics#robot#poweredbydynamixel#upcycling#overengineered#electronics#hardware#creative#engineering#tech#diyelectronics#science#arduino#arduinoprojects#raspberrypi#3dprint#3dprinting#design
0 notes
Photo

Dev. 2019 Coming soon. #art #robot #dynamixel #technology #attiny85 https://www.instagram.com/p/B4ZhAoQDgzl/?igshid=1pf2unhuhca2
0 notes
Video
instagram
Diseño de Robot + AR! 🤖 #bellasartesuruguay #artedigital #robot #dynamixel #fusion360 #3d #3dprint #arbotix #unity3d #vuforia #Ar #real #virtual https://www.instagram.com/p/B1IGZlKgtB5/?igshid=4ddpjwwz9bi2
#bellasartesuruguay#artedigital#robot#dynamixel#fusion360#3d#3dprint#arbotix#unity3d#vuforia#ar#real#virtual
0 notes
Video
instagram
upping my robotics game with these smart servos from Dynamixel and learning ROS (Robot Operating System) learning curve has been super steep, but I’m finally figuring out how to get my data paths working. #robot #robots #dynamixel #ros #servo #diy #robotics #animatronics https://www.instagram.com/p/Bt_dxRCH7eZ/?utm_source=ig_tumblr_share&igshid=16y3gn1773rh4
0 notes
Text
Микроконтроллер CM-530 и сервопривод Dynamixel AX-12A
Dynamixel AX-12A Dynamixel AX-12A Добрый день, уважаемые читатель. Сегодня мы изучаем самые базовые принципы работы с сервоприводами Dynamixel AX-12A на контроллере CM-530.

Платформа для меня вообще не знакомая, разве что в R+ Motion визуально запрограммить биолоида. Но когда решил собрать первую модель робота с набора ТехноЛаб (профессиональный уровень), столкнулся с тем, что информации в интернете мало, либо она не совсем конкретна, а примеры работ, которые встроены в ПО, уж больно раздуты и сложны для базового понимания.
Обратился к методичке для преподователя от ТехноЛаб (исследовательский уровень). Там конечно всё более менее понятно, но опять таки много лишнего. Н.р., зачем то нужно использовать проверки правильного ID мотора, функцию правильности сборки механизма и настройки приводов и прочее, прочее, прочее. Уже начал подумывать, что просто надо принять логику новой платформы и языка программирования. Но всё же как-то не то, усложнено до безобразия, в сравнении например с той же Arduino. В общем оставалось продолжать копать дальше, чтобы понять, есть ли более простые способы просто заставить двигаться моторчик или нет. И при этом программу смотрел для устройства «Шлагбаум», где один мотор и всё. Забугровые ютуб каналы, каналы ТехноЛаба, сайты, методички ничего не проясняли. Похоже тупик, подумал я, но… Решил зайти в Robotis e-Manual, может быть сам разработчик прояснит в своих руководствах как наначальном уровне управлять моторами. В общем нырнул и о чудо, нашёл. Не явную информацию, но достаточную, чтобы попробо��ать поэкспериментировать.

PORT[3]:Servo Motor Position = 802, именно эта строчка натолкнула на мысль о том, что можно банально указать какой мотор используем, его конечную позицию и всё. Аллилуйя, заработало. Даже не понимаю сейчас, как же ранее не получалось, я ведь тоже пытался банально встроить в код минимум строк и запустить, но при загрузке кода в микроконтроллер и запуске программы, ничего не происходило. Программа запускалась и тут же завершалась, так и не сдвинув ни на миллиметр мотор.
Фух, странно, вам может покажется, что вообще плёвое дело, мол друг, ты вообще с какой планеты? Но ведь всё самое простое и лёгкое не всегда на поверхности. В общем всё работает. И теперь можно заставить работать шлагбаум как нам надо с минимумом строчек кода и лишних на начальном этапе, функций.
И вот, настроил мотор на минимум действий. Включаю и мотор лихо поворачивается на градусов 15. Было неожиданно, да и не удивительно, столько провалов. Тут пришло в голову подрегулировать скорость работы мотора. Всё сработало, никаких проблем. Стал понимать, что оказывается программирование через R+ Task не то чтобы сложно, а очень просто. Что-то среднее между ПО LEGO® MINDSTORMS® Education EV3 и ArduinoIDE.
Итак, имеем шлагбаум в закрытом состоянии.

Задача не тривиальная: поднять на 90° шлагбаум, а по прошествии секунды, опустить его. Давайте попробуем. Эмм, и тут конечно началось. Очень забавная штука, этот таймер. Не совсем понял его логику работы, т.к. здесь на результат влияет так же и скорость, с которой мотор работает. Но опытным путём получаем, что, выставив таймер на 2 секунды, у нас всё получается, хотя и не точно. =)
А вот и код:
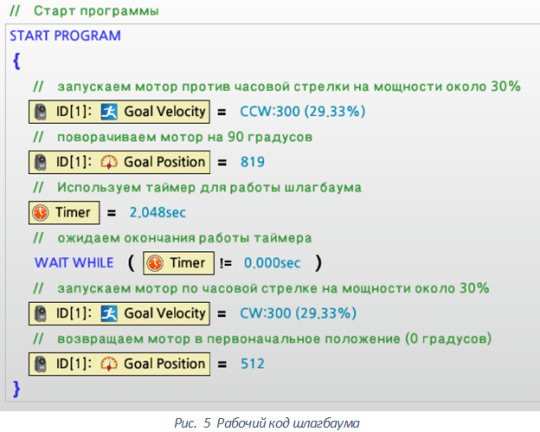
Здесь я использую цикл «WAIT WHILE», который ждёт пока таймер не дойдёт до нуля.
А теперь давайте управлять кнопочками, так же интереснее, хоть какой-то контроль. Попробовал накидать код, всё сработало, отлично и никаких тебе таймеров:

И тут как раз кстати нашёл экспорт кода в PNG и TXT. Удобно, теперь можно вставлять не только красиво выглядящий код, хоть в 100 строк, но и получить его текстовую версию, вставил и запустил.
Единственное, что пришлось добавить, так это «ENDLESS LOOP» (бесконечный цикл), иначе мы не сможем нажимать кнопочки до посинения. =))) И что интересно, если мы подняли шлагбаум, то повторное нажатие кнопки на подъём ни к чему не приведёт. Я думаю, что дело в том, что мотор передаёт значения своего положения, поэтому и не двигается. С таким я столкнулся впервые, когда только пытался заставить работать мотор. Т.е. как ни выкручивай его, он всегда повернёт на 90 градусов и всё, т.к. в моторе я как понимаю есть своя прошивка и он всегда знает где 90, а где 360. Тут сразу вспомнилась Ардуинка, где работая с сервой, ты повернув его на 90 градусов относительно нынешнего положения и снова отправив команду на поворот, увидишь, что серва снова попытается повернуть на 90 градусов. Т.е. мы имеем дело с очень умными так сказать моторами. =) Dynamixel
0 notes
Text
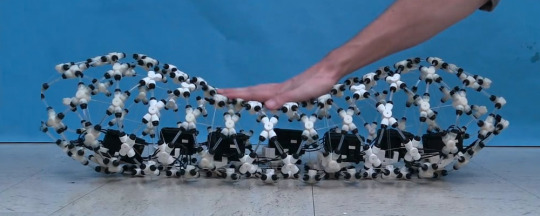

CMMWorm (Compliant Modular Mesh Worm) by Andrew D. Horchler et al (2015), Case Western Reserve University, Cleveland, OH. In earthworms, peristaltic locomotion occurs when waves of muscle contraction travel along the body. The CMMWorm is constructed from 3D printed and off-the-shelf parts. The flexible rods that form the mesh can be quickly fitted together using 3D-printed four-way push-fit connectors. The body is actuated by Robotis Dynamixel actuators that contract different sections of the body to produce peristaltic motion.
105 notes
·
View notes
Text
🤖 No creerás estos 13 ANIMALES ROBOT que nos ofrece la Tecnología

¿Sabías que hay robots que pueden imitar el comportamiento de los animales más increíbles? ¿Te gustaría ver cómo funcionan y qué pueden hacer? Pues no te pierdas este vídeo, porque te voy a mostrar algunos de los animales robot más sorprendentes que existen. Desde un perro robot que puede correr y saltar, hasta una serpiente robot que puede deslizarse. Te aseguro que vas a quedar sorprendido con lo que estos robots son capaces de hacer. Así que ya sabes, si te gustan los animales y la tecnología, descubre en este vídeo cual es tu favorito y déjalo en los comentarios. El vídeo: https://youtu.be/jEJN_SvyFM4 13 ANIMALES ROBOT: MX-Phoenix hexapod: El MX-Phoenix es un proyecto de Zenta Robotic Creations, una empresa dedicada al diseño de robots avanzados para aficionados. El creador del robot es Zenta, un ingeniero sueco que lleva más de 10 años construyendo robots hexápodos. El MX-Phoenix es una evolución de su primer robot, el Phoenix, que hizo hace una década. Es un robot hexápodo tiene 18 servos Dynamixel de alta potencia y precisión que le permiten mover sus seis patas con gran agilidad y suavidad. Este algoritmo, llamado DynaZgait, permite al robot adaptarse al terreno y cambiar la velocidad y la altura de las patas según la situación. El robot también tiene un sensor IMU que le ayuda a mantener el equilibrio. Es capaz de caminar por superficies irregulares, subir y bajar escalones, girar sobre sí mismo y hasta bailar. Harvard Arthrobots: Este robot está inspirado en los artrópodos, es decir, los animales invertebrados que tienen el cuerpo segmentado y las patas articuladas, como los insectos, los crustáceos o las arañas. Los arthrobots son robots que imitan la estructura y el movimiento de estos animales, lo que les permite adaptarse a diferentes terrenos y obstáculos. Se trata de un robot modular que se puede ensamblar y desensamblar fácilmente, cambiando el número y la forma de sus segmentos y patas. El robot está hecho de un material flexible que se puede doblar y estirar mediante la aplicación de una corriente eléctrica. Así, el robot puede cambiar su forma y su modo de locomoción según las necesidades del entorno. Podría usarse para explorar lugares difíciles de acceder, como cuevas, túneles o zonas de desastre. El robot Harvard Arthrobots es un ejemplo de cómo la naturaleza puede inspirarnos para crear tecnologías innovadoras y útiles. MIT MINI Cheetah: Es un robot cuadrúpedo que puede correr, saltar, girar y hasta hacer volteretas. Mide unos 50 centímetros de alto y pesa unos 9 kilos, lo que lo hace muy manejable y portátil. El robot puede alcanzar una velocidad máxima de unos 8 kilómetros por hora, y puede saltar hasta medio metro de altura. Además, tiene un sistema de control que le permite adaptarse al terreno y mantener el equilibrio en situaciones difíciles. Por ejemplo, puede recuperarse si se cae o si recibe un empujón, o puede sortear obstáculos como escaleras o troncos. También es una muestra de cómo la robótica puede ser divertida y entretenida, ya que el robot también juega al fútbol o al pilla-pilla con otros robots o con humanos. El objetivo de los investigadores del MIT es crear robots que puedan interactuar con las personas de forma amigable y cooperativa, y que puedan ayudar en tareas como el rescate o la exploración. Kawasaki Bex: También es un robot cuadrúpedo y está inspirado en una cabra montesa, con cuernos incluidos. Puede transportar hasta 100 kilos de carga y moverse por terrenos irregulares o lisos gracias a sus patas y ruedas. Además, se puede montar en él y conducirlo con unas manijas integradas. Bex forma parte del proyecto Kaleido de Kawasaki, que busca desarrollar robots modulares que se adapten a diferentes necesidades y escenarios. Según sus creadores, Bex está pensado para aplicaciones como el transporte de materiales en obras, la inspección de plantas industriales o el transporte de cultivos en granjas. Lo que más me llama la atención de Bex es su capacidad para cambiar de modo de locomoción según el tipo de superficie. En terrenos escarpados o con obstáculos, Bex camina a cuatro patas como una cabra, manteniendo el equilibrio y la estabilidad. Robot Rat SQuRo: Es otro robot cuadrúpedo que imita el movimiento de una rata porque son animales muy ágiles, inteligentes y adaptables, capaces de superar obstáculos y explorar entornos complejos. El Robot Rat SQuRo tiene estas mismas características, y puede ser usado para fines científicos, educativos o recreativos. Tiene un cuerpo flexible y articulado, que le permite moverse como una rata real. Tiene sensores táctiles, auditivos y visuales, que le permiten percibir el entorno y reaccionar a los estímulos. También tiene un sistema de aprendizaje automático, que le permite aprender de sus experiencias y mejorar sus habilidades. Es un ejemplo de cómo la robótica puede inspirarse en la naturaleza para crear máquinas más eficientes y versátiles. Puede tener muchas aplicaciones prácticas, como la exploración de terrenos peligrosos, el rescate de personas atrapadas, el estudio del comportamiento animal o el entretenimiento de los niños. Titanoboa: Se trata de una réplica robótica de una serpiente prehistórica que vivió hace unos 60 millones de años y que medía unos 15 metros de largo. El robot Titanoboa fue creado por un grupo de artistas e ingenieros canadienses que querían recrear la sensación de estar frente a una criatura tan impresionante y aterradora. El robot se mueve como una serpiente real, con ondas que recorren su cuerpo metálico. Se ha exhibido en varios festivales y eventos de arte y tecnología alrededor del mundo, donde ha causado sensación entre el público. Algunas personas se atreven a acercarse y tocarlo, mientras que otras prefieren mantenerse a una distancia prudente. El objetivo de los creadores del robot es generar conciencia sobre la extinción de las especies y el impacto del cambio climático en el planeta. El Titanoboa es un ejemplo de cómo la tecnología puede servir para explorar la historia natural y la imaginación humana. Snakeskin Robot: Es un robot que imita la piel de las serpientes para desplazarse por diferentes superficies. El robot Snakeskin Robot fue desarrollado por investigadores de Harvard, que se basaron en las propiedades de fricción anisotrópica de las escamas de las serpientes. Esto significa que las escamas tienen más agarre en una dirección que en otra, lo que permite a las serpientes avanzar haciendo ondas con su cuerpo. El robot tiene una piel artificial hecha de láminas de plástico estirable, grabadas con láser con diferentes patrones de escamas. Al inflar y desinflar el robot, las escamas se deforman y se levantan del cuerpo, creando una tracción con el suelo. Los investigadores probaron varios tipos de escamas, y encontraron que las mejores eran las trapezoidales, que se parecen más a las de las serpientes reales. El robot Snakeskin Robot tiene muchas aplicaciones potenciales, como la búsqueda y rescate, la inspección industrial o la medicina. Robobee: Es para aquellos que les guntan los proyecto de bricolaje. Se trata de un kit para construir una avispa robótica inusual en unas cuatro horas de diversión. El kit está formado por cientos de piezas por lo que es importante nerner paciencia a la hora de montarlo. Existen dos versiones, la ordinaria y otra con efectos de luz y sonido. Las dimensiones aproximadas tras su montaje es de 20 por 20 por 20 centímetros. Sus principales matariales son hierro y cobre y su peso de aproximadamente 1 kilogramo. El kit incluye destornillador, alicates, dos versiones de alas y de cola. MIT RoboTuna: Es un robot que imita el movimiento de los atunes, uno de los peces más rápidos y ágiles del océano. RoboTuna fue creado por el Instituto Tecnológico de Massachusetts para estudiar la hidrodinámica de los peces y mejorar el diseño de los vehículos submarinos. Tiene un cuerpo flexible y una cola que se mueve de lado a lado, como los atunes reales. Puede nadar a una velocidad de hasta 1,5 metros por segundo y cambiar de dirección rápidamente. RoboTuna es capaz de seguir una trayectoria preprogramada o reaccionar a los estímulos del entorno, como la luz o el sonido. Los investigadores del MIT esperan que RoboTuna sirva de modelo para desarrollar robots submarinos más avanzados y versátiles, que puedan explorar el fondo marino, realizar misiones de rescate o vigilancia, o incluso interactuar con los animales acuáticos. Stickybot: Es un robot que puede escalar paredes como un gecko, gracias a unas patas especiales que se adhieren a las superficies. Fue desarrollado por la Universidad de Stanford y es uno de los ejemplos más impresionantes de la robótica inspirada en la naturaleza. El Stickybot no solo es capaz de escalar paredes, sino que también puede cambiar de dirección, saltar y caminar por el techo. Estas habilidades podrían ser muy útiles para explorar lugares difíciles de acceder o realizar tareas de rescate o vigilancia. También es una herramienta para estudiar la biomecánica y la física de los geckos y otros animales escaladores. Este robot combina la ciencia y la tecnología para crear una máquina que imita la vida. El Stickybot me hace pensar en las posibilidades infinitas que tiene la robótica y en lo mucho que podemos aprender de los animales. Flying Goose: Es un robot alemán que puede volar como un ganso y que tiene muchas aplicaciones prácticas y divertidas. Flying Goose es un robot que imita el vuelo de los gansos, usando unas alas articuladas que se mueven con un motor eléctrico. El robot puede seguir una ruta preprogramada o controlada por un mando a distancia. El robot puede volar hasta 20 minutos con una sola carga de batería. Puede usarse para estudiar el comportamiento de las aves migratorias, para monitorear el cambio climático, para explorar zonas de difícil acceso o para hacer fotografías aéreas. El robot también puede usarse para divertirse, ya que se puede volar como un juguete o como parte de un espectáculo artístico. Flying Goose es un robot que demuestra cómo la tecnología puede aprender de la naturaleza y crear soluciones innovadoras y sostenibles. Festo AquaPenguin: Los ingenieros de Hannover se inspiraron en los pingüinos reales para crear este robot que tiene el mismo diseño aerodinámico y el mismo principio de propulsión por alas. Es un vehículo submarino autónomo (AUV) que puede orientarse y navegar de forma independiente por un tanque de agua, y desarrollar patrones de comportamiento variables y diferenciados en grupo. El AquaPenguin tiene unas alas que están compuestas por un esqueleto de elementos de acero elástico incrustados en una matriz de silicona que les da su perfil. Las alas pueden girar a un ángulo óptimo en interacción con las fuerzas hidrodinámicas en cada golpe, y también se puede regular el ángulo de inclinación de forma interactiva. El robot puede maniobrar en espacios reducidos, girar sobre sí mismo cuando sea necesario y, a diferencia de sus arquetipos biológicos, incluso nadar hacia atrás. También tiene sensores inteligentes que le permiten evitar colisiones en el funcionamiento en grupo, controlar la profundidad, la presión y la temperatura, y mantener la estabilidad posicional. El robot es un ejemplo de cómo la naturaleza puede servir de laboratorio para procesos eficientes y cómo se puede transferir esta tecnología a la automatización. Squidbot: Es un robot inspirado en el calamar, que puede nadar, cambiar de color y hasta disparar chorros de agua. Según sus creadores, tiene varias aplicaciones potenciales, como la exploración submarina, el monitoreo ambiental y la educación. Squidbot tiene un cuerpo flexible y elástico que se mueve con impulsos eléctricos. También tiene una cámara y sensores que le permiten detectar su entorno y adaptarse a él. Y lo más divertido es que puede cambiar de color usando unas células especiales llamadas cromatóforos, que imitan a las de los calamares reales. Así puede camuflarse o comunicarse con otros robots. ¿No te parece increíble? Índice del vídeo: - 0:00 Introducción - 0:44 MX-Phoenix hexapod - 1:37 Harvard Arthrobots - 2:35 MIT MINI Cheetah - 3:31 Kawasaki Bex - 4:25 Robot Rat SQuRo - 5:24 Titanoboa - 6:19 Snakeskin Robot - 7:17 Robobee - 7:57 MIT RoboTuna - 8:48 Stickybot - 9:39 Flying Goose - 10:31 Festo AquaPenguin - 11:42 Squidbot Te puede interesar: - ⛺ Vacaciones Sorprendentes con estos 15 INVENTOS para el CAMPING - 🤖 Sorpréndete con estos 11 ROBOTS a la Vanguardia de la TECNOLOGÍA Read the full article
0 notes
Text
🤖 No creerás estos 13 ANIMALES ROBOT que nos ofrece la Tecnología

¿Sabías que hay robots que pueden imitar el comportamiento de los animales más increíbles? ¿Te gustaría ver cómo funcionan y qué pueden hacer? Pues no te pierdas este vídeo, porque te voy a mostrar algunos de los animales robot más sorprendentes que existen. Desde un perro robot que puede correr y saltar, hasta una serpiente robot que puede deslizarse. Te aseguro que vas a quedar sorprendido con lo que estos robots son capaces de hacer. Así que ya sabes, si te gustan los animales y la tecnología, descubre en este vídeo cual es tu favorito y déjalo en los comentarios. El vídeo: https://youtu.be/jEJN_SvyFM4 13 ANIMALES ROBOT: MX-Phoenix hexapod: El MX-Phoenix es un proyecto de Zenta Robotic Creations, una empresa dedicada al diseño de robots avanzados para aficionados. El creador del robot es Zenta, un ingeniero sueco que lleva más de 10 años construyendo robots hexápodos. El MX-Phoenix es una evolución de su primer robot, el Phoenix, que hizo hace una década. Es un robot hexápodo tiene 18 servos Dynamixel de alta potencia y precisión que le permiten mover sus seis patas con gran agilidad y suavidad. Este algoritmo, llamado DynaZgait, permite al robot adaptarse al terreno y cambiar la velocidad y la altura de las patas según la situación. El robot también tiene un sensor IMU que le ayuda a mantener el equilibrio. Es capaz de caminar por superficies irregulares, subir y bajar escalones, girar sobre sí mismo y hasta bailar. Harvard Arthrobots: Este robot está inspirado en los artrópodos, es decir, los animales invertebrados que tienen el cuerpo segmentado y las patas articuladas, como los insectos, los crustáceos o las arañas. Los arthrobots son robots que imitan la estructura y el movimiento de estos animales, lo que les permite adaptarse a diferentes terrenos y obstáculos. Se trata de un robot modular que se puede ensamblar y desensamblar fácilmente, cambiando el número y la forma de sus segmentos y patas. El robot está hecho de un material flexible que se puede doblar y estirar mediante la aplicación de una corriente eléctrica. Así, el robot puede cambiar su forma y su modo de locomoción según las necesidades del entorno. Podría usarse para explorar lugares difíciles de acceder, como cuevas, túneles o zonas de desastre. El robot Harvard Arthrobots es un ejemplo de cómo la naturaleza puede inspirarnos para crear tecnologías innovadoras y útiles. MIT MINI Cheetah: Es un robot cuadrúpedo que puede correr, saltar, girar y hasta hacer volteretas. Mide unos 50 centímetros de alto y pesa unos 9 kilos, lo que lo hace muy manejable y portátil. El robot puede alcanzar una velocidad máxima de unos 8 kilómetros por hora, y puede saltar hasta medio metro de altura. Además, tiene un sistema de control que le permite adaptarse al terreno y mantener el equilibrio en situaciones difíciles. Por ejemplo, puede recuperarse si se cae o si recibe un empujón, o puede sortear obstáculos como escaleras o troncos. También es una muestra de cómo la robótica puede ser divertida y entretenida, ya que el robot también juega al fútbol o al pilla-pilla con otros robots o con humanos. El objetivo de los investigadores del MIT es crear robots que puedan interactuar con las personas de forma amigable y cooperativa, y que puedan ayudar en tareas como el rescate o la exploración. Kawasaki Bex: También es un robot cuadrúpedo y está inspirado en una cabra montesa, con cuernos incluidos. Puede transportar hasta 100 kilos de carga y moverse por terrenos irregulares o lisos gracias a sus patas y ruedas. Además, se puede montar en él y conducirlo con unas manijas integradas. Bex forma parte del proyecto Kaleido de Kawasaki, que busca desarrollar robots modulares que se adapten a diferentes necesidades y escenarios. Según sus creadores, Bex está pensado para aplicaciones como el transporte de materiales en obras, la inspección de plantas industriales o el transporte de cultivos en granjas. Lo que más me llama la atención de Bex es su capacidad para cambiar de modo de locomoción según el tipo de superficie. En terrenos escarpados o con obstáculos, Bex camina a cuatro patas como una cabra, manteniendo el equilibrio y la estabilidad. Robot Rat SQuRo: Es otro robot cuadrúpedo que imita el movimiento de una rata porque son animales muy ágiles, inteligentes y adaptables, capaces de superar obstáculos y explorar entornos complejos. El Robot Rat SQuRo tiene estas mismas características, y puede ser usado para fines científicos, educativos o recreativos. Tiene un cuerpo flexible y articulado, que le permite moverse como una rata real. Tiene sensores táctiles, auditivos y visuales, que le permiten percibir el entorno y reaccionar a los estímulos. También tiene un sistema de aprendizaje automático, que le permite aprender de sus experiencias y mejorar sus habilidades. Es un ejemplo de cómo la robótica puede inspirarse en la naturaleza para crear máquinas más eficientes y versátiles. Puede tener muchas aplicaciones prácticas, como la exploración de terrenos peligrosos, el rescate de personas atrapadas, el estudio del comportamiento animal o el entretenimiento de los niños. Titanoboa: Se trata de una réplica robótica de una serpiente prehistórica que vivió hace unos 60 millones de años y que medía unos 15 metros de largo. El robot Titanoboa fue creado por un grupo de artistas e ingenieros canadienses que querían recrear la sensación de estar frente a una criatura tan impresionante y aterradora. El robot se mueve como una serpiente real, con ondas que recorren su cuerpo metálico. Se ha exhibido en varios festivales y eventos de arte y tecnología alrededor del mundo, donde ha causado sensación entre el público. Algunas personas se atreven a acercarse y tocarlo, mientras que otras prefieren mantenerse a una distancia prudente. El objetivo de los creadores del robot es generar conciencia sobre la extinción de las especies y el impacto del cambio climático en el planeta. El Titanoboa es un ejemplo de cómo la tecnología puede servir para explorar la historia natural y la imaginación humana. Snakeskin Robot: Es un robot que imita la piel de las serpientes para desplazarse por diferentes superficies. El robot Snakeskin Robot fue desarrollado por investigadores de Harvard, que se basaron en las propiedades de fricción anisotrópica de las escamas de las serpientes. Esto significa que las escamas tienen más agarre en una dirección que en otra, lo que permite a las serpientes avanzar haciendo ondas con su cuerpo. El robot tiene una piel artificial hecha de láminas de plástico estirable, grabadas con láser con diferentes patrones de escamas. Al inflar y desinflar el robot, las escamas se deforman y se levantan del cuerpo, creando una tracción con el suelo. Los investigadores probaron varios tipos de escamas, y encontraron que las mejores eran las trapezoidales, que se parecen más a las de las serpientes reales. El robot Snakeskin Robot tiene muchas aplicaciones potenciales, como la búsqueda y rescate, la inspección industrial o la medicina. Robobee: Es para aquellos que les guntan los proyecto de bricolaje. Se trata de un kit para construir una avispa robótica inusual en unas cuatro horas de diversión. El kit está formado por cientos de piezas por lo que es importante nerner paciencia a la hora de montarlo. Existen dos versiones, la ordinaria y otra con efectos de luz y sonido. Las dimensiones aproximadas tras su montaje es de 20 por 20 por 20 centímetros. Sus principales matariales son hierro y cobre y su peso de aproximadamente 1 kilogramo. El kit incluye destornillador, alicates, dos versiones de alas y de cola. MIT RoboTuna: Es un robot que imita el movimiento de los atunes, uno de los peces más rápidos y ágiles del océano. RoboTuna fue creado por el Instituto Tecnológico de Massachusetts para estudiar la hidrodinámica de los peces y mejorar el diseño de los vehículos submarinos. Tiene un cuerpo flexible y una cola que se mueve de lado a lado, como los atunes reales. Puede nadar a una velocidad de hasta 1,5 metros por segundo y cambiar de dirección rápidamente. RoboTuna es capaz de seguir una trayectoria preprogramada o reaccionar a los estímulos del entorno, como la luz o el sonido. Los investigadores del MIT esperan que RoboTuna sirva de modelo para desarrollar robots submarinos más avanzados y versátiles, que puedan explorar el fondo marino, realizar misiones de rescate o vigilancia, o incluso interactuar con los animales acuáticos. Stickybot: Es un robot que puede escalar paredes como un gecko, gracias a unas patas especiales que se adhieren a las superficies. Fue desarrollado por la Universidad de Stanford y es uno de los ejemplos más impresionantes de la robótica inspirada en la naturaleza. El Stickybot no solo es capaz de escalar paredes, sino que también puede cambiar de dirección, saltar y caminar por el techo. Estas habilidades podrían ser muy útiles para explorar lugares difíciles de acceder o realizar tareas de rescate o vigilancia. También es una herramienta para estudiar la biomecánica y la física de los geckos y otros animales escaladores. Este robot combina la ciencia y la tecnología para crear una máquina que imita la vida. El Stickybot me hace pensar en las posibilidades infinitas que tiene la robótica y en lo mucho que podemos aprender de los animales. Flying Goose: Es un robot alemán que puede volar como un ganso y que tiene muchas aplicaciones prácticas y divertidas. Flying Goose es un robot que imita el vuelo de los gansos, usando unas alas articuladas que se mueven con un motor eléctrico. El robot puede seguir una ruta preprogramada o controlada por un mando a distancia. El robot puede volar hasta 20 minutos con una sola carga de batería. Puede usarse para estudiar el comportamiento de las aves migratorias, para monitorear el cambio climático, para explorar zonas de difícil acceso o para hacer fotografías aéreas. El robot también puede usarse para divertirse, ya que se puede volar como un juguete o como parte de un espectáculo artístico. Flying Goose es un robot que demuestra cómo la tecnología puede aprender de la naturaleza y crear soluciones innovadoras y sostenibles. Festo AquaPenguin: Los ingenieros de Hannover se inspiraron en los pingüinos reales para crear este robot que tiene el mismo diseño aerodinámico y el mismo principio de propulsión por alas. Es un vehículo submarino autónomo (AUV) que puede orientarse y navegar de forma independiente por un tanque de agua, y desarrollar patrones de comportamiento variables y diferenciados en grupo. El AquaPenguin tiene unas alas que están compuestas por un esqueleto de elementos de acero elástico incrustados en una matriz de silicona que les da su perfil. Las alas pueden girar a un ángulo óptimo en interacción con las fuerzas hidrodinámicas en cada golpe, y también se puede regular el ángulo de inclinación de forma interactiva. El robot puede maniobrar en espacios reducidos, girar sobre sí mismo cuando sea necesario y, a diferencia de sus arquetipos biológicos, incluso nadar hacia atrás. También tiene sensores inteligentes que le permiten evitar colisiones en el funcionamiento en grupo, controlar la profundidad, la presión y la temperatura, y mantener la estabilidad posicional. El robot es un ejemplo de cómo la naturaleza puede servir de laboratorio para procesos eficientes y cómo se puede transferir esta tecnología a la automatización. Squidbot: Es un robot inspirado en el calamar, que puede nadar, cambiar de color y hasta disparar chorros de agua. Según sus creadores, tiene varias aplicaciones potenciales, como la exploración submarina, el monitoreo ambiental y la educación. Squidbot tiene un cuerpo flexible y elástico que se mueve con impulsos eléctricos. También tiene una cámara y sensores que le permiten detectar su entorno y adaptarse a él. Y lo más divertido es que puede cambiar de color usando unas células especiales llamadas cromatóforos, que imitan a las de los calamares reales. Así puede camuflarse o comunicarse con otros robots. ¿No te parece increíble? Índice del vídeo: - 0:00 Introducción - 0:44 MX-Phoenix hexapod - 1:37 Harvard Arthrobots - 2:35 MIT MINI Cheetah - 3:31 Kawasaki Bex - 4:25 Robot Rat SQuRo - 5:24 Titanoboa - 6:19 Snakeskin Robot - 7:17 Robobee - 7:57 MIT RoboTuna - 8:48 Stickybot - 9:39 Flying Goose - 10:31 Festo AquaPenguin - 11:42 Squidbot Te puede interesar: - ⛺ Vacaciones Sorprendentes con estos 15 INVENTOS para el CAMPING - 🤖 Sorpréndete con estos 11 ROBOTS a la Vanguardia de la TECNOLOGÍA Read the full article
0 notes
Photo

Do you #like #icecold #cocacola in you #Favorit #drinks ? And what about #robots do you #enjoy them too? If so our #robot #bartender might be just the #right #partner for you . This is our #prototype #gripper #solution it consists of #3dprinting #parts a #servo from @robotis_global #Dynamixel ax12a and a #lastinch #camera Now I will #development some #python3 #software and we are #readytogo https://www.instagram.com/p/CJOvy-Fgh5O/?igshid=1x2gsztxvdf3u
#like#icecold#cocacola#favorit#drinks#robots#enjoy#robot#bartender#right#partner#prototype#gripper#solution#3dprinting#parts#servo#dynamixel#lastinch#camera#development#python3#software#readytogo
0 notes
Photo

🖐🏼 دست رباتیک SAM ✏️ طراحی، 🔩 مدلسازی و 🛠 ساخت دانشگاه ETH Zurich سوییس 🇨🇭 ⭐️ در این دست رباتیک از سروو موتورهای داینامیکسل استفاده شده است. Meet SAM - The Soft Robotic Hand #ربات #رباتیک #داینامیکسل #سرووموتور #طراحی #ساخت #مهندسی #سوییس #تکنولوژی #فناوری #تحقیق #Dynamixel #robot #robotic #tech #technology #engineering #science #research @robotis_global (at ETH Zürich) https://www.instagram.com/p/CEWlG_RDzUs/?igshid=1r37zl4niykyk
#ربات#رباتیک#داینامیکسل#سرووموتور#طراحی#ساخت#مهندسی#سوییس#تکنولوژی#فناوری#تحقیق#dynamixel#robot#robotic#tech#technology#engineering#science#research
0 notes
Video
youtube
Driving Robotic Dynamixel Servos ( sending and receiving data ) with Ar...
0 notes
Video
instagram
Love this little robot from Dynamixel The robot is programmed to mimic your claps! Oh no! My Christmas list just got a little longer🎄 #diyelectronics #robotics #robot #engineering #robots #makerfaire @makekorea #maker #makerspace #mimic #cooltech #instatech #futuretech #innovation #codingheroes #robotis #seoul @andystechgarage (at Seoul, Korea) https://www.instagram.com/p/B32CW6xnvtQ/?igshid=pmjwu5fxbjme
#diyelectronics#robotics#robot#engineering#robots#makerfaire#maker#makerspace#mimic#cooltech#instatech#futuretech#innovation#codingheroes#robotis#seoul
4 notes
·
View notes
Photo

"OpenRB-150 (DYNAMIXEL Controller)" . https://tokopedia.link/clGEblZbZxb https://www.instagram.com/p/Cqc-U2GhGxJ/?igshid=NGJjMDIxMWI=
0 notes