#Bipolar stepper
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
Women make up for the other 50% of Tumblr’s audience.
Text
H bridge motor driver, Analog motor drivers, Bipolar stepper, Dc motor driver
L6208 Series 52 V 5.6 A 0.3 Ohm DMOS Driver For Bipolar Stepper Motor-POWERSO-36
0 notes
Text
https://www.futureelectronics.com/p/semiconductors--analog--drivers--motor-drivers/l298n-stmicroelectronics-5532882
Brushless DC motor driver, Dc motor driver, what is a motor driver
L298 Series 46 V 2 A Dual Full Bridge Driver Vertical - Multiwatt-15
#Drivers Motor Drivers#L298N#STMicroelectronics#Brushless DC motor driver#Dc motor driver#what is a motor driver#bipolar stepper#Stepper motor drivers#Bipolar stepper#Motor driver circuit#programmable motor driver#chip#H bridge
1 note
·
View note
Text
https://www.futureelectronics.com/p/semiconductors--analog--drivers--motor-drivers/l298n-stmicroelectronics-5319967
STMicroelectronics, L298N, Drivers Motor Drivers
L298 Series 46 V 2 A Dual Full Bridge Driver Vertical - Multiwatt-15
#STMicroelectronics#L298N#Drivers Motor Drivers#DC motor driver control#circuit#h bridge#4 Phase Bridge Driver#multi MOSFET driver#Bipolar stepper#motor driver chip#Programmable motor driver#brushless motor driver
1 note
·
View note
Text
How to Vary the Speed of a Bipolar Stepper Motor

Stepper motors are versatile electromechanical devices used in a wide range of applications that require precise motion control. Bipolar stepper motors, in particular, are widely favored due to their torque efficiency and simpler winding structure compared to unipolar stepper motors. One of the most important parameters when working with a stepper motor is speed control. Varying the speed of a bipolar stepper motor can be essential for applications like 3D printing, CNC machines, robotics, and automation systems.
This article explores how to vary the speed of a bipolar stepper motor effectively, providing a thorough understanding of the principles involved, techniques for controlling speed, and important considerations. It also integrates key terms related to the topic for a comprehensive guide to optimizing bipolar stepper motor speed.
Table of Contents
What is a Bipolar Stepper Motor?
Basic Working Principles of a Bipolar Stepper Motor
Why Speed Control is Important
Factors Affecting the Speed of a Bipolar Stepper Motor
Techniques to Vary Speed
a) Microstepping
b) Pulse Width Modulation (PWM)
c) Voltage Control
d) Current Limiting
Using a Microcontroller for Speed Control
Considerations When Varying Speed
Common Applications
Conclusion
#100 days of productivity#academia#bujo spread#classroom#college#college life#duolingo#education#educhums#etymology
3 notes
·
View notes
Text
How to use hybrid stepper motors reasonably
1.Structure of hybrid stepper motors Hybrid stepper motors are mainly composed of two parts: the stator and the rotor. The stator usually has 8 poles or 4 poles, with a certain number of small teeth evenly distributed on the pole surface, and the coil on the pole can be energized in two directions. The rotor consists of two tooth plates, which are staggered by half a tooth pitch, and an axially magnetized annular permanent magnet is sandwiched in the middle. This structure makes all teeth on the same section of the rotor plate have the same polarity, while the polarity of the rotor plates in different sections is opposite.

2.Control principle of hybrid stepper motors
1.Microstep control: Control the movement of the motor to multiple positions within a step interval by subdividing the step pulse. Microstep control can make the motor move in multiple small steps in each step cycle, making the rotation smoother. This control method adjusts the phase and amplitude of the current so that the motor can stay in a finer position within each step interval, thereby improving the positioning accuracy. 2. Speed control: Control the speed of the motor by adjusting the frequency of the input pulse. The higher the pulse frequency, the faster the motor speed; conversely, the speed decreases. This control method is suitable for application scenarios that require adjusting the motor speed. 3. Torque control: Adjust the torque output of the motor according to the load demand. By adjusting the input current, the torque of the motor can be controlled to adapt to different load conditions. This control method can ensure that the motor can operate stably under different loads.
3.Design advantages of hybrid stepper motors
1.High output torque: The rotor of the hybrid stepper motor is made of permanent magnetic material, which gives it a high output torque and can drive a large load, which is suitable for application scenarios that require a large torque. 2. High step accuracy: The step accuracy of the hybrid stepper motor is high, which can reach 0.9° or even less. This makes it perform well in applications that require high-precision positioning, such as CNC machine tools and robots. 3. Low noise and low vibration: Because the rotor is made of permanent magnetic material, the hybrid stepper motor generates low noise and vibration during operation, which is suitable for application scenarios with high requirements for noise and vibration, such as medical equipment and precision instruments. 4. High efficiency: The efficiency of hybrid stepper motors is relatively high, reaching more than 70%, which makes them advantageous in energy conversion and utilization. 5. Multiple drive modes: Hybrid stepper motors can adopt multiple drive modes such as unipolar drive, bipolar drive, subdivision drive and microstep drive. These drive modes can be selected and adjusted according to specific application requirements to achieve the best performance and control effect.

4.Protection measures for hybrid stepper motors 1. Heat dissipation management: Hybrid stepper motors usually have left and right heat dissipation slots. Through the design of these heat dissipation slots, the heat inside the housing can be effectively dissipated to the outside of the housing to avoid heat accumulation and burnout of motor components. In addition, it is also necessary to regularly remove dust from the surface of the motor, because dust will affect the heat dissipation effect of the motor. 2. Voltage and current monitoring: During operation, ensure that the load current does not exceed the rated value to avoid overheating or insulation aging of the motor due to overload. The power supply voltage fluctuation range should be controlled between -5% and +10% of the rated voltage to avoid overload or difficulty in starting the motor due to low voltage. 3. Temperature protection: Check the bearing and winding temperature regularly to ensure that it does not exceed the allowable upper limit (such as the bearing temperature generally does not exceed 95°C). Abnormal temperature rise may be a sign of insufficient lubrication, overload or poor ventilation, and the machine needs to be shut down for inspection. 4. Mechanical maintenance: Regularly replace grease (every 1000 hours for sliding bearings and every 500 hours for rolling bearings), monitor abnormal noise or vibration of bearings, and deal with jamming or wear problems in a timely manner. Manually turn the shaft to check whether it is smooth and ensure that there is no mechanical jamming or friction. 5. Environmental management: Prevent water droplets, oil stains, and dust from entering the motor. Protective or closed structures are preferred in harsh environments. Explosion-proof motors should be used in flammable and explosive places. 6. Regular inspection and maintenance: including regular inspection of bearing wear and timely replacement of severely worn bearings; ensuring that the motor operates in a suitable application environment to avoid the impact of high temperature environment on the motor; reasonably controlling the power supply voltage and current to avoid overload operation causing damage to the motor.
0 notes
Text
Bipolar stepper motor-power, H bridge motor driver, Current Limit Switch
L6208 Series 52 V 5.6 A 0.3 Ohm DMOS Driver For Bipolar Stepper Motor-POWERSO-36
0 notes
Text
How to drive a unipolar stepper motor
1.Introduction A unipolar stepper motor is a special stepper motor, which is characterized by achieving stepping motion through a specific driving mode. This motor usually has a permanent magnet with 5 or 6 wires and a hybrid structure. Its working principle is based on a design in which each of the two windings has a central tap. In use, the center tap of the winding is usually connected to the positive power supply, and the two ends of each winding are alternately grounded to reverse the direction of the field provided by the winding.

2.Working mode of unipolar stepper motor 1.In the single-phase driving mode, the stepper motor has only one set of windings, which is connected to an external power supply to make the magnetic field on the stator change continuously within a cycle. When the magnetic field changes, the rotor rotates with the change of the magnetic field. The advantages of this method are simple structure, easy control and implementation, but it is easy to lose step when running at low speed. 2.The two-phase drive method is different. It involves two sets of windings in the stepper motor. The windings are connected to an external power supply to make the magnetic field on the stator change alternately. Only one set of windings is energized at a time, attracting or repelling the rotor, causing the rotor to rotate clockwise or counterclockwise. Compared with the single-phase drive method, the two-phase drive method has better performance and stability, but the implementation is relatively complicated.
3.The drive method of unipolar stepper motor 1.The drive method of unipolar stepper motor mainly involves unipolar drive circuits. This drive method uses four transistors to drive the two phases of the stepper motor. The structure of the motor includes two sets of coils with center taps, and the entire motor has a total of six wires connected to the outside world. This motor is sometimes called a four-phase motor, but in fact it has only two phases, and a more accurate description should be a two-phase six-wire stepper motor. The characteristic of the unipolar drive circuit is that the current in the motor coil has only one direction, the current direction does not change. This characteristic makes the unipolar motor relatively simple to drive. 2.The driving methods of unipolar stepper motors also include the three most basic methods: single 4-beat method, double 4-beat method and single double 8-beat method. In the single 4-beat driving process, only one phase is energized at each moment, while the double 4-beat method is that two adjacent phases are energized at each moment. These two methods have their own characteristics. The former only works in one phase at a time, and the latter provides a greater output torque by driving two adjacent phases at the same time. The single double 8-beat method is a hybrid driving method that combines the single 4-beat method and the double 4-beat method. It completes a cycle through 8 steps. This method is more suitable for occasions where a greater output torque is required. In addition, the driving circuit of the two-phase unipolar stepper motor is basically the same as the driving circuit of the two-phase bipolar stepper motor in terms of input segment configuration, internal logic, control circuit and drive circuit use, but the output segment configuration is different. Two-phase bipolar stepper motors are driven using a dual-channel H-bridge, while two-phase unipolar stepper motors are driven using two switches (MOSFET) in two channels. This is because a two-phase unipolar stepper motor can be driven by making the current flow in a certain direction from the power supply supplied to the center tap of each coil.
4.Application areas of unipolar stepper motors 1.Robot control: Unipolar stepper motors are suitable for robot control operations, such as in manufacturing and assembly line control. By accurately controlling the rotation angle and step length of the stepper motor, the robot can achieve precise motion and position control to complete various tasks. 2.Medical equipment: Unipolar stepper motors are also suitable for medical equipment, such as synchronous or high-speed motion control. In medical equipment, stepper motors are used to control the movement and position of medical devices, for example, to control the rotation angle and position of X-ray equipment, and to control the joint drive system of surgical robots. 3.Automation equipment: unipolar stepper motors are suitable for automated production processes, such as fast and precise position control on conveyor belt systems, and robots that inspect and assemble parts in automobile manufacturing. 4.Joint drive systems and positioning systems in robotics: stepper motors are widely used in joint drive systems and positioning systems in robotics. By controlling the rotation angle and step length of stepper motors, precise motion and position control can be achieved to complete various tasks.
Source:https://olgana.pixnet.net/blog/post/176250202
0 notes
Text
Performance characteristics and applications of bipolar stepper motors
1.Basic structure of bipolar stepper motors The basic structure of bipolar stepper motors includes three parts: stator, rotor and winding. The stator is the stationary part of the motor, usually composed of multiple stator teeth, each of which is wound with two-phase bipolar windings, namely A-phase winding and B-phase winding. The A-phase winding is wound from stator tooth 1 and then wound on stator teeth 3, 5, and 7 in sequence, where stator teeth 1 and 5 have the same winding direction, and stator teeth 3 and 7 have the same winding direction. The B-phase winding is also wound on the same principle, where stator teeth 4 and 8 are a group, and stator teeth 2 and 6 are a group.

2.Working principle of bipolar stepper motors The working principle of bipolar stepper motors is based on the interaction between electromagnetic fields and permanent magnets. When current passes through the electromagnet on the stator, a magnetic field is generated, which attracts the poles on the rotor and causes it to rotate. As the direction of the current changes, the rotor will continue to rotate until it encounters external resistance. Specifically, each winding of a bipolar stepper motor can be energized in two directions, so one end of each winding can be either N-pole or S-pole. This design makes the bipolar stepper motor more flexible in control mode, and can achieve more precise position control and higher dynamic performance.
3.Performance characteristics of bipolar stepper motors 1.High-precision positioning: Bipolar stepper motors use stepping technology, and each step position is very accurate, which can accurately locate the required position. This high-precision positioning feature gives bipolar stepper motors obvious advantages in situations where precise position control is required. 2.Strong reversibility: Bipolar stepper motors have two independent coils, and the direction of the current in the coils can be changed to achieve forward and reverse rotation of the motor. This strong reversibility makes bipolar stepper motors very adaptable in situations where the direction of the motor needs to be changed frequently. 3.Large static torque: Bipolar stepper motors can also provide high torque output in a stationary state, which allows them to withstand various loads and provide good starting power when they start to rotate. This characteristic of large static torque makes bipolar stepper motors have good application prospects in occasions where they need to bear large loads. 4.Sensitive dynamic response: Bipolar stepper motors have a fast dynamic response speed and can quickly adjust the control amount to cope with system changes. This makes bipolar stepper motors have good application effects in occasions that require fast response. 5.High control accuracy: The speed and angle of bipolar stepper motors can be accurately adjusted according to the size and frequency of the control signal. This high control accuracy makes bipolar stepper motors have good application effects in occasions that require high-precision control. 6.Simple design: Compared with other types of motors, bipolar stepper motors are also very easy to design and manufacture due to the simplicity of their working principles and easy control.
4.Application of bipolar stepper motors 1.Medical equipment: Bipolar stepper motors have important applications in medical equipment. Due to their miniaturization and high precision, they can be precisely controlled in the body and support high-level operations in medicine and surgery. 2.Chemical Industry: In the field of chemical industry, bipolar stepper motors are used for the control of powders and liquids. Their precise control and high efficiency make their application in the subtle field more prominent. 3.Instrumentation: In the field of instrumentation, bipolar stepper motors are mainly used for flow control in pipelines and the regulation of moving powders in the production process to ensure precise measurement and control. 4.Industrial Automation: Bipolar stepper motors are widely used in industrial automation equipment, robots, CNC machine tools, textile machinery and other fields. It can provide precise position control and reliable operating performance, and is suitable for occasions requiring high precision and fast response. 5.Computer Peripherals: In computer peripherals such as printers and scanners, bipolar stepper motors are used for precise position control and fast response speed. 6.Photography and Filmmaking: Bipolar stepper motors are also used in photography and filmmaking, where precise control is required.
Similar articles:https://plaza.rakuten.co.jp/yixing/
0 notes
Text
Servo motor driver, Programmable motor driver, dc motor speed control
L6208 Series 52 V 5.6 A 0.3 Ohm DMOS Driver For Bipolar Stepper Motor-POWERSO-36
0 notes
Text
How to Set Up and Configure the A4988 Stepper Motor Driver
The A4988 Stepper Motor Driver Carrier Black is a versatile and widely-used driver for controlling bipolar stepper motors. Setting up and configuring the A4988 correctly is crucial to ensure optimal performance and prevent damage to your motor and driver. This article provides a comprehensive guide on how to set up and configure the A4988 Stepper Motor Driver.

1. Unboxing and Initial Inspection
Before you begin, ensure that you have all the necessary components:
A4988 Stepper Motor Driver Carrier Black
Stepper motor
Power supply (typically 8V to 35V)
Microcontroller (e.g., Arduino)
Breadboard and connecting wires
Inspect all components for any visible damage.
2. Wiring the A4988 Stepper Motor Driver
Proper wiring is crucial for the safe operation of the A4988. Follow these steps:
Connect the Motor:
Connect the stepper motor coils to the A4988’s output pins (2A, 2B, 1A, 1B). Ensure the connections are correct to avoid damaging the motor driver.
Connect Power Supply:
Connect the motor power supply (8V to 35V) to the VDD and GND pins of the A4988. Ensure the power supply can deliver sufficient current for your motor.
Connect Microcontroller:
Connect the step, direction, enable, and ground pins of the A4988 to the corresponding pins on your microcontroller. Typically, these connections are:
STEP pin to a digital output pin on the microcontroller
DIR pin to another digital output pin
ENABLE pin to ground (or a digital output pin if you want to control it)
Optional Connections:
You may also connect the MS1, MS2, and MS3 pins to configure microstepping settings. These can be connected to logic high (5V) or low (GND) according to your desired microstepping mode.
3. Configuring Current Limit
Setting the correct current limit is vital to prevent overheating and ensure smooth motor operation. Follow these steps to configure the current limit:
Adjust the Potentiometer:
Locate the small potentiometer on the A4988 board. This potentiometer adjusts the current limit.
Use a small screwdriver to turn the potentiometer. Turning it clockwise increases the current limit, while turning it counterclockwise decreases it.
Measure VREF:
To set the current limit accurately, measure the VREF voltage with a multimeter. Place the positive probe on the potentiometer’s test point and the negative probe on a ground pin.
Calculate Current Limit:
The formula for setting the current limit is: Current Limit = VREF / (8 * R_SENSE), where R_SENSE is the current sense resistor value (typically 0.05 ohms).
Adjust the potentiometer until the desired VREF voltage is reached.
4. Setting Microstepping Mode
The A4988 supports various microstepping modes, which can be set by configuring the MS1, MS2, and MS3 pins:
Microstepping Table:
Full step: MS1 = 0, MS2 = 0, MS3 = 0
Half step: MS1 = 1, MS2 = 0, MS3 = 0
Quarter step: MS1 = 0, MS2 = 1, MS3 = 0
Eighth step: MS1 = 1, MS2 = 1, MS3 = 0
Sixteenth step: MS1 = 1, MS2 = 1, MS3 = 1
Connecting MS Pins:
Connect the MS1, MS2, and MS3 pins to logic high (5V) or logic low (GND) according to the desired microstepping mode.
5. Programming the Microcontroller
To control the A4988, you’ll need to write a program for your microcontroller. Upload the code to your Arduino. Adjust the delay Microseconds value to control the speed of the stepper motor.
6. Testing and Fine-Tuning
Once everything is connected and configured, it’s time to test your setup:
Power On:
Turn on your power supply and microcontroller.
Initial Test:
Run the microcontroller program to ensure the motor steps as expected.
Adjustments:
Fine-tune the current limit and microstepping settings if necessary.
Monitoring:
Monitor the motor and driver for any signs of overheating or unexpected behavior.
Conclusion
Setting up and configuring the A4988 Stepper Motor Driver Carrier Black requires careful attention to wiring, current limiting, and microstepping settings. By following this guide, you can ensure your stepper motor operates efficiently and reliably, making the most of the A4988’s capabilities. Happy tinkering!
0 notes

Link
A full selection of bipolar transistors from many transistor manufacturers including bipolar junction transistor (bjt) switch, insulated gate, NPN or high voltage transistor for your circuits. Also explains what is a bipolar transistor.
1 note
·
View note
Photo

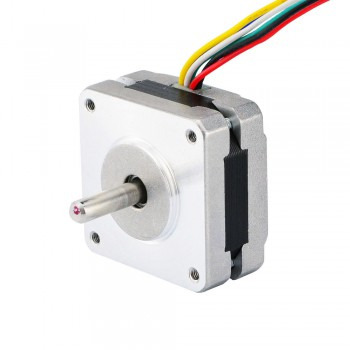
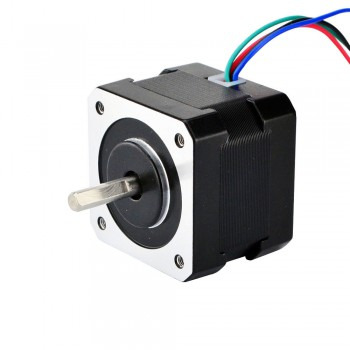
Mectex DC Stepper Motor
We have various types of stepper motors like Unipolar stepper motor, bipolar stepper motor, micro stepper motor and stepper driver that use in Applications like welding, textile machines and printing presses.
Visit us at https://www.mechtex.com
1 note
·
View note
Text
H bridge motor driver, Analog driver, what is motor driver, Stepper motor driver
L6208 Series 52 V 5.6 A 0.3 Ohm DMOS Driver For Bipolar Stepper Motor-POWERSO-36
0 notes

Link

0 notes