#COMPUTER CODE
Explore tagged Tumblr posts
Visit Tumblr Blog
Explore Tumblr blogs with no restrictions, modern design and the best experience.
Last Seen Tumblr Blogs





Fun Fact
Forty percent of Tumblr users are between the ages of 18 to 25.
Text

Found at www.gifs.cx
#computer#webcore#old web#web graphics#gifs#animated gifs#computer screen#computer code#90s#2000s#retro#nostalgic
254 notes
·
View notes
Text
Things I Think Would Put a Victorian Child in a Coma
A singular sour patch kid
Gummy worms
Any song by Kikuo
Death Metal
A Five Nights at Freddy’s jump-scare compilation
Any JJK fan edit
Coloured contact lenses
People who dress goth
Computer code
A baja blast
Anime waifu body pillows
Mint toothpaste
Ai art generators
Facetime
Pugs
I have more on my list but I thought I’d stop it there for now
#those poor victorian children#About to get their worlds ROCKED#Things that would put a victorian child in a coma#shitpost#shitposting#sour patch kids#gummy worms#kikuo#death metal#five nights at freddy's#jujutsu kaisen#goth aesthetic#computer code#baja blast#anime#body pillow#toothpaste#ai art#facetime#pugs
7 notes
·
View notes

Text
It's terrifying how much damage is being done by Musk. And the media just downplays it, treating the whole thing as a form of entertainment!

Musk will cost America TRILLIONS.
Trump is the enabler. Republicans are complicit.
This entire DOGE 'efficiency' ruse will be the biggest waste in history.
#us politics#fuck musk#fuck trump#us treasury#fuck the gop#doge#computer code#bluesky#data breach#treasury code
1K notes
·
View notes
Text
Programming Embedded Systems (with C and GNU Development Tools)
[Programming Embedded Systems (with C and GNU Development Tools). By Michael Barr & Anthony J Massa. 2nd Edition, 1 October 2006. Publisher: O'Reilly Media. Paperback: 301 pages, Dimensions: 17.78 x 1.98 x 23.34 cm. ISBN: 978-0-596-00983-0]
In the past 15 months or so I elected to expand my personal and professional skill set to include working with small computing systems, sometimes referred to as microcontrollers. These devices have become virtually omnipresent, in everything from automobiles and bar-code scanners to toasters and doorbells. If you operate a late-model vehicle, for instance, you may have as many as 70 (!) of these devices in the car controlling everything from the fuel mixture to emissions to anti-lock brakes and collision avoidance sensing.
I was interested in moving into this arena as part of my career, as there were many openings for people with a strong understanding of the imperatives attendant on both the software and hardware of embedded systems. I knew a bit about the electronics side of things and I have done software development of one sort or another most of my 40+ years as a professional, but this arena poses unique challenges and opportunities. I knew I needed to do some specialized self-teaching, and this book seemed like a great place to start.
To start with, what exactly is an embedded system?
As the name implies, it is a system - in this case a miniature computing device - that is a component of a larger framework. This larger framework can take on myriad forms. Some of the largest such frameworks are satellite networks. The embedded system comprises hardware - a central processing unit, or CPU, along with some (minimal) on-board memory and one or more electrical interfaces (e.g. a USB or RJ45 jack) through which it can communicate with the outside world.
Unlike the computers most of us are familiar with, such as Windows or MacOS-based laptops or Linux servers, these devices often do not have an operating system (WIndows, MacOS and Linux are all operating systems) that performs many of the low-level functions needed to keep the device running and useful.
This keeps the device flexible in terms of how it can be used, but at the expense of more detailed and subtle development and maintenance requirements. Thus, the "software" on an embedded system may be a very small bit of computer code that simply turns on the interfaces electrically and then waits for something to happen.
Programming software for these systems is intriguing but fraught with issues that an ordinary computer user never sees.
For example, given that the memory and interface resources on these devices tend to be rather modest, it's necessary for the programmer to take care of any bookkeeping that is necessary to keep the basic functions from colliding. If one of the interfaces is used to provide a scanned barcode to a waiting receiver, it must pass that information through some on-board memory first.
The embedded software designer needs to be sure that this information can't be corrupted, or "clobbered", by a competing task that might be, for instance, putting the scanning laser into sleep mode to save power. Moreover, there are cases where the same locations in memory need to be shared by tasks as a part of getting work done.
But what happens if one task is trying to write data to a specific memory location while another task is trying to read from it? Is there always a specific order in which this happens? What happens if either operation is incomplete for some reason? Will the device recover and continue to operate, or will it lock up? The aforementioned are but a tiny set of examples that the developer must bear in mind.
Messrs Barr and Massa have many decades of experience between the two of them in just these kinds of environments. I was delighted to see just how easy this book is to read and how thoroughly they cover all of the issues that accompany such a software development enterprise. They are careful to create and explain examples that use commonly-available development kits (I use an STM32 ARM Cortex-M Development Board myself; there is a photo of one such system below) and free or nearly-free software tools to break down the barriers to entry in this field.

This book is really as much about operating system design as it is about microcontroller software development; if one is interested in what nearly every operating system must do, this volume talks all about it.
Above and beyond this, it is a wealth of anecdotes, sample code, and general wisdom that will really ease the novice into this exciting world of programming and small-device control.
I highly recommend it to anyone who wants to get down on the bare metal with computers. It is necessary to be at least familiar with the C programming language (almost all of the examples are coded in C) and it would be very helpful to have worked with at least one Assembly language as well. Beyond that, the only requirement for getting the most out of the book is a willingness to experiment and be delighted.


Image Credits (from above down; with thanks to copyright owners): (1) STM32 ARM Cortex-M Development Board © Copyright Owner, date unknown (2) Book Cover © O'Reilly Media 11 October 2006 (3) Michael Barr © Barr Group 2012-2025. (Anthony J Massa, no photograph found)
Kevin Gillette
Words Across Time
4 February 2025
wordsacrosstime
#Words Across Time#Kevin Gillette#wordsacrosstime#February 2025#Michael Barr#Anthony Massa#O'Reilly Media#Embedded Systems#C#Satellite Networks#Electrical Interfaces#MacOS#Linux#Flexible#Computer Code#Barcode#Scanning Laser#Memory Location#STM32#Microcontrollers#Anecdotes#Assembly Language#Sample Code#General Wisdom#Computers
0 notes
Text
In the 2000s you sat a kid in front of a Neopets pet page and they’d learn the fundamentals of html within the hour
#computer proficiency is dying because you don’t need to know coding to look awesome online anymore 😔#tays takes#neopets
17K notes
·
View notes
Text
Muscle-Powered Robotics: A New Frontier in Biomimetic Engineering
New Post has been published on https://thedigitalinsider.com/muscle-powered-robotics-a-new-frontier-in-biomimetic-engineering/
Muscle-Powered Robotics: A New Frontier in Biomimetic Engineering
In a notable development in the field of robotics, researchers at ETH Zurich and the Max Planck Institute for Intelligent Systems have unveiled a new robotic leg that mimics biological muscles more closely than ever before. This innovation marks a significant departure from traditional robotics, which has relied on motor-driven systems for nearly seven decades.
The collaborative effort, led by Robert Katzschmann and Christoph Keplinger, has resulted in a robotic limb that showcases remarkable capabilities in energy efficiency, adaptability, and responsiveness. This advancement could potentially reshape the landscape of robotics, particularly in fields requiring more lifelike and versatile mechanical movements.
The significance of this development extends beyond mere technological novelty. It represents a crucial step towards creating robots that can more effectively navigate and interact with complex, real-world environments. By more closely replicating the biomechanics of living creatures, this muscle-powered leg opens up new possibilities for applications ranging from search and rescue operations to more nuanced interactions in human-robot collaboration.
The Innovation: Electro-Hydraulic Actuators
At the heart of this revolutionary robotic leg are electro-hydraulic actuators, dubbed HASELs by the research team. These innovative components function as artificial muscles, providing the leg with its unique capabilities.
The HASEL actuators consist of oil-filled plastic bags, reminiscent of those used for making ice cubes. Each bag is partially coated on both sides with a conductive material that serves as an electrode. When voltage is applied to these electrodes, they attract each other due to static electricity, similar to how a balloon might stick to hair after being rubbed against it. As the voltage increases, the electrodes draw closer, displacing the oil within the bag and causing it to contract overall.
This mechanism allows for paired muscle-like movements: as one actuator contracts, its counterpart extends, mimicking the coordinated action of extensor and flexor muscles in biological systems. The researchers control these movements through computer code that communicates with high-voltage amplifiers, determining which actuators should contract or extend at any given moment.
Unlike conventional robotic systems that rely on motors – a 200-year-old technology – this new approach represents a paradigm shift in robotic actuation. Traditional motor-driven robots often struggle with issues of energy efficiency, adaptability, and the need for complex sensor systems. In contrast, the HASEL-powered leg addresses these challenges in novel ways.
Advantages: Energy Efficiency, Adaptability, Simplified Sensors
The electro-hydraulic leg demonstrates superior energy efficiency compared to its motor-driven counterparts. When maintaining a bent position, for instance, the HASEL leg consumes significantly less energy. This efficiency is evident in thermal imaging, which shows minimal heat generation in the electro-hydraulic leg compared to the substantial heat produced by motor-driven systems.
Adaptability is another key advantage of this new design. The leg’s musculoskeletal system provides inherent elasticity, allowing it to flexibly adjust to various terrains without the need for complex pre-programming. This mimics the natural adaptability of biological legs, which can instinctively adjust to different surfaces and impacts.
Perhaps most impressively, the HASEL-powered leg can perform complex movements – including high jumps and rapid adjustments – without relying on intricate sensor systems. The actuators’ inherent properties allow the leg to detect and react to obstacles naturally, simplifying the overall design and potentially reducing points of failure in real-world applications.
Applications and Future Potential
The muscle-powered robotic leg demonstrates capabilities that push the boundaries of what’s possible in biomimetic engineering. Its ability to perform high jumps and execute fast movements showcases the potential for more dynamic and agile robotic systems. This agility, combined with the leg’s capacity to detect and react to obstacles without complex sensor arrays, opens up exciting possibilities for future applications.
In the realm of soft robotics, this technology could improve how machines interact with delicate objects or navigate sensitive environments. For instance, Katzschmann suggests that electro-hydraulic actuators could be particularly advantageous in developing highly customized grippers. Such grippers could adapt their grip strength and technique based on whether they’re handling a robust object like a ball or a fragile item such as an egg or tomato.
Looking further ahead, the researchers envision potential applications in rescue robotics. Katzschmann speculates that future iterations of this technology could lead to the development of quadruped or humanoid robots capable of navigating challenging terrains in disaster scenarios. However, he notes that significant work remains before such applications become reality.
Challenges and Broader Impact
Despite its groundbreaking nature, the current prototype faces limitations. As Katzschmann explains, “Compared to walking robots with electric motors, our system is still limited. The leg is currently attached to a rod, jumps in circles and can’t yet move freely.” Overcoming these constraints to create fully mobile, muscle-powered robots represents the next major hurdle for the research team.
Nevertheless, the broader impact of this innovation on the field of robotics cannot be overstated. Keplinger emphasizes the transformative potential of new hardware concepts like artificial muscles: “The field of robotics is making rapid progress with advanced controls and machine learning; in contrast, there has been much less progress with robotic hardware, which is equally important.”
This development signals a potential shift in robotic design philosophy, moving away from rigid, motor-driven systems towards more flexible, muscle-like actuators. Such a shift could lead to robots that are not only more energy-efficient and adaptable but also safer for human interaction and more capable of mimicking biological movements.
The Bottom Line
The muscle-powered robotic leg developed by researchers at ETH Zurich and the Max Planck Institute for Intelligent Systems marks a significant milestone in biomimetic engineering. By harnessing electro-hydraulic actuators, this innovation offers a glimpse into a future where robots move and adapt more like living creatures than machines.
While challenges remain in developing fully mobile, autonomous robots with this technology, the potential applications are vast and exciting. From more dexterous industrial robots to agile rescue machines capable of navigating disaster zones, this breakthrough could reshape our understanding of robotics. As research progresses, we may be witnessing the early stages of a paradigm shift that blurs the line between the mechanical and the biological, potentially revolutionizing how we design and interact with robots in the years to come.
#agile#applications#approach#Arrays#artificial#artificial muscles#autonomous#autonomous robots#Biomechanics#circles#code#Collaboration#collaborative#computer#computer code#Design#development#efficiency#Electric motors#electricity#electrode#electrodes#energy#energy efficiency#engineering#ETH Zurich#Future#Hardware#heart#Heat
0 notes
Text




#EMAIL#EMAIL ADDRESS#FORM#SECURITY#CYBERSECURITY#XBOX#CONTROLLER#apple computer#APPLE COMPUTERS#INTEL CORE ULTRA PROCESSOR#APPLE M SERIES PROCESSOR#CODE#COMPUTER CODE#COMPUTER PROGRAMMING#ARTIFICIAL INTELLIGENCE#MACHINE LEARNING#ML#LLM#large language model#TECHNOLOGY#INTERNET#NETWORK#THE INTERNET#WIFI#WIRELESS#CELL PHONE#CELLULAR PHONE#CELLULAR TELEPHONE#SMART PHONE#xbox controller
0 notes
Text

Many people make the Eighth Inspector out to be an actual pacifist,
because they discount his decision to destroy the alien computer in the made-for-telly film.
#Inspector Spacetime#Inspector Spacetime: The Movie (film)#made for TV film#made for telly film#the Inspector (character)#Technical Pacifist (trope)#Technical Pacifist#Eighth Inspector#8th Inspector#the made for telly film doesn't count#discounting his only television appearance#otherwise he's pretty pacifistic#destroying the alien computer#computer code#Y2K bug
1 note
·
View note
Text


Funny goofy signs I made with [link now defunct :(]
#objectum#os/or#suggestive#giggling and twirling my hair#on the wave of code#techcore#posic#computer kisser#computer objectum#objectophilia#objectum sexuality
6K notes
·
View notes
Text
Cable chaos
#digitalismmm#digitalism#digital#tech#aesthetic#photography#machines#art#techcore#vintage#computer#computing#hardware#software#wires#cables#retro#internet#online#coding#programming
1K notes
·
View notes
Text
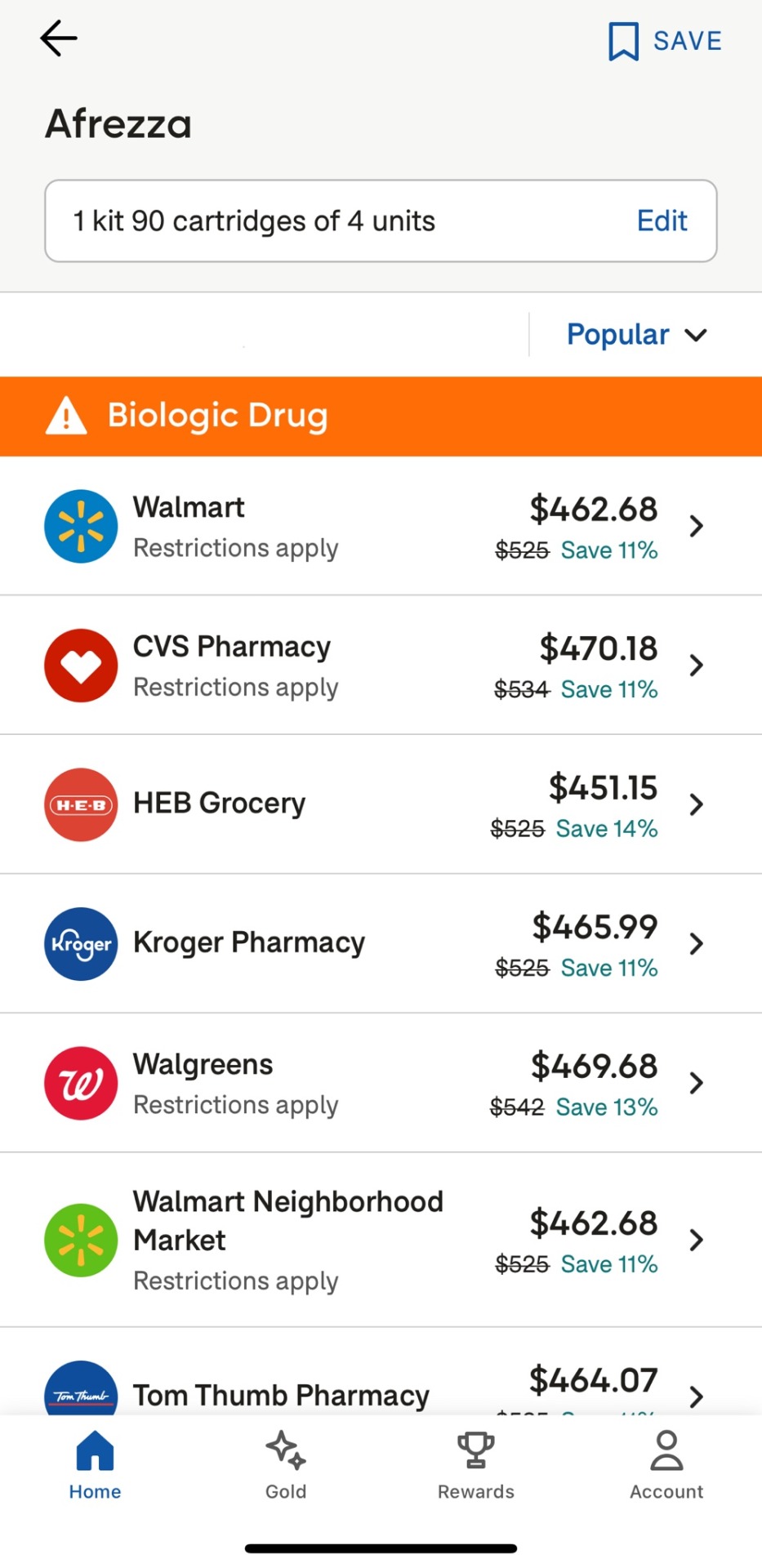
Rationing Insulin.
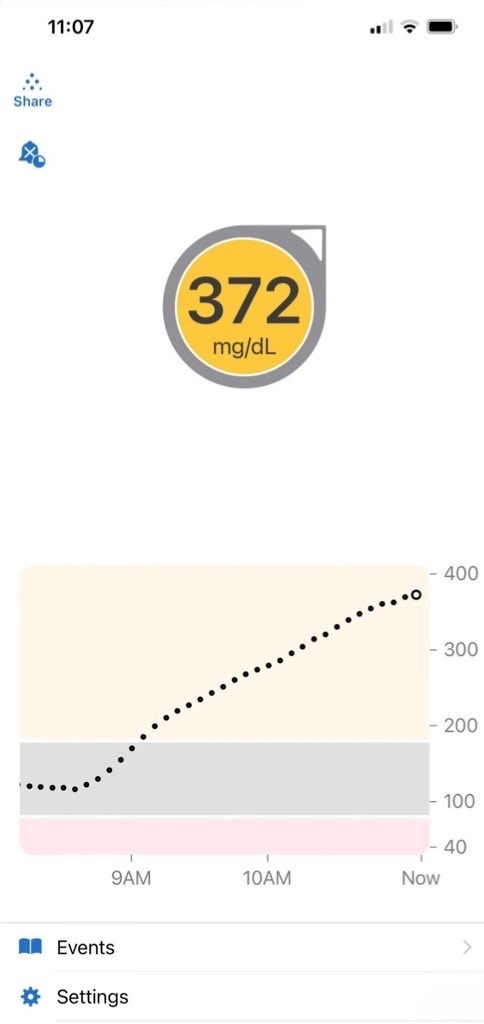
Blood sugar reading this morning. The average blood sugar reading should be between 60mg/dl - 100mg/dl. I am terrified of not being able to administer my insulin simply because I was too poor to afford it. I am strongly in need of community help.
CA: $HushEmu
I am happy to announce I raised $33 🎉 I only need $417 to get my prescription

#antiques#archaeology#artificial intelligence#biology#code#chemistry#college#computer science#classic car#conservation#entomology#environment#equestrian#etsy#ferrari#fishing#charity#geography#halloween#anthropology
1K notes
·
View notes
Text
398 notes
·
View notes
Text
˚ ✦ . . ˚ . . ✦ ˚ . ★⋆. . ˚ do i dare disturb the universe? * ✦ . . ✦ ˚ ˚ .˚ . . ✦
#solitaire in many ways is very universe city coded#at least i believe so#also pls look at this on a computer not a phone omg#it's so much nicer i swear i promise#universe city#aled last#alice oseman#frances janvier#osemanverse#radio silence#universe city podcast#february friday#carys last#solitaire#solitaire alice oseman#tori spring
208 notes
·
View notes
Text




DS9 as textposts
Part 1/??
#Star Trek#Deep Space Nine#Star Trek Deep Space Nine#Julian Bashir#Luther Sloan#Elim Garak#Garashir#Sloanshir#I didn't actually intend for this to be so Garashir and Sloanshir coded; with “Julian must suffer” kicked in too whoops#But here we are~#Also I edited these on my phone instead of a proper computer so if the text is too hard to read or whatever let me know#And I'll take this down and repost with a better quality version when I get home
326 notes
·
View notes